三、虚功原理 假设某力学系统受K个完整约束而处于平衡状态, 则此系统中的每一个质,点都必须处于平衡状态。 于是有 F+R,=0, (i=1,2,.n) 上式点乘6,并对其求和得 2月8所+2R斯=0 对理想约束有 ∑R6后=0 i=1 故有6w=∑F6方=0 i=1
三、虚功原理 假设某力学系统受K个完整约束而处于平衡状态, 则此系统中的每一个质点都必须处于平衡状态。 RF ii =+ .= ni ),2,1(,0 K K 上式点乘 ,并对其求和得 irK δ 0 1 1 ∑∑ =⋅+⋅ = = i n i i i n i i rRrF K K K K δ δ 0 1 ∑ =⋅ = i n i i 对理想约束有 rR K K δ 0 1 ∑ =⋅= = i n i i rFW 于是有 故有 K K δ δ
6r-269=0 这就是理想约束 下,系统的平衡条 mw=2g底+f,+k1=0】 件,称为虚功原 理或虚位移原理。 i= 虚功原理在广义坐标下的表现为 F=(91,42,.4,t) 或i=(qa,t) (a=1,2.,s) Or dar*oq dr=0q 证d2++ or dqs*ot 0qs ori dt 成au+ di0 0年Lt
0 1 ∑ =⋅= = i n i i rFW K K δ δ ( 0) 1 =∑ =++ = iiziiy n i iix δ δδδ zFyFxFW 这就是理想约束 下,系统的平衡条 件,称为虚功原 理或虚位移原理. 虚功原理在广义坐标下的表现为 或 ),( 21 tqqqrr = ii . s K K tqrr s)2,1(),( = ii α α .= , K K dt t r dq q r dq q r dq q r rd i s s i i i i ∂ ∂ + ∂ ∂ +.+ ∂ ∂ + ∂ ∂ = K K K K K 2 2 1 1 dt t r dq q r i s i ∂ ∂ + ∂ ∂ = ∑ = K K α α 1 α
在上式中把实位移改成虚位移(从物理上讲的), 从数学上讲就是把微分改成变分。并注意到0=9 有 6v=∑(g.ma)=0 +0-立f原一汉 =】 由于各互相独立,故有 Q。=0—广义坐标下系统的平衡方程
0)( 1 = ∑ = = α α δ αδqQw s α α q r FQ i n i ∂ ∂ ∑ ⋅= = K K 1 Qα = 0 δ α 由于各 互相独立,故有 q 在上式中把实位移改成虚位移(从物理上讲的), 从数学上讲就是把微分改成变分。并注意到 有 其中 - 称为广义力。 ——广义坐标下系统的平衡方程。 α α δ δq q r r s i i ∑ = ∂ ∂ = 1 2 K K 0 = t δ
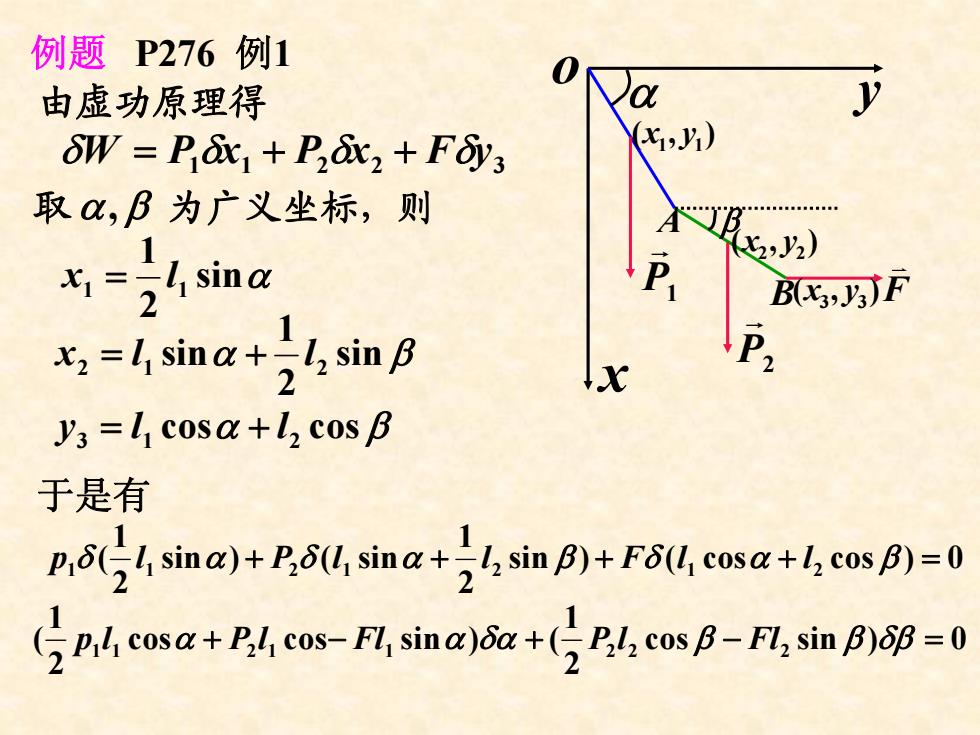
例题P276例1 由虚功原理得 a δW=P证1+P2c2+F3 取a,B为广义坐标,则 s) hsina 2 ByF x=h sing+lsin B x y3=l cosa+l cos B 于是有 .sin)+,sina+sinFc0 (PH cos+cs-FZ sina)a+P cosB-Fl,sin
例题 P276 例 1 o x y P1 G P2 G A B F K α β ),( 11 yx ),( 22 yx ),( 33 yx 由虚功原理得 2211 3 δ = δ + δ + δyFxPxPW 取 为广义坐标,则 α , β sin α 2 1 11 = lx α sin β 2 1 12 sin 2 += llx = 13 cos α + lly 2 cos β 于是有 cos()sin 0)cos 2 1 sin()sin 2 1 ( 11 + 12 αδαδ + 2 + 1 llFllPlp 2 βαδβ =+ cos 0)sin 2 1 cos ()sincos 2 1 ( 11 α 12 −+ FllPlp 1 δαα + 22 β − FllP 2 δββ =
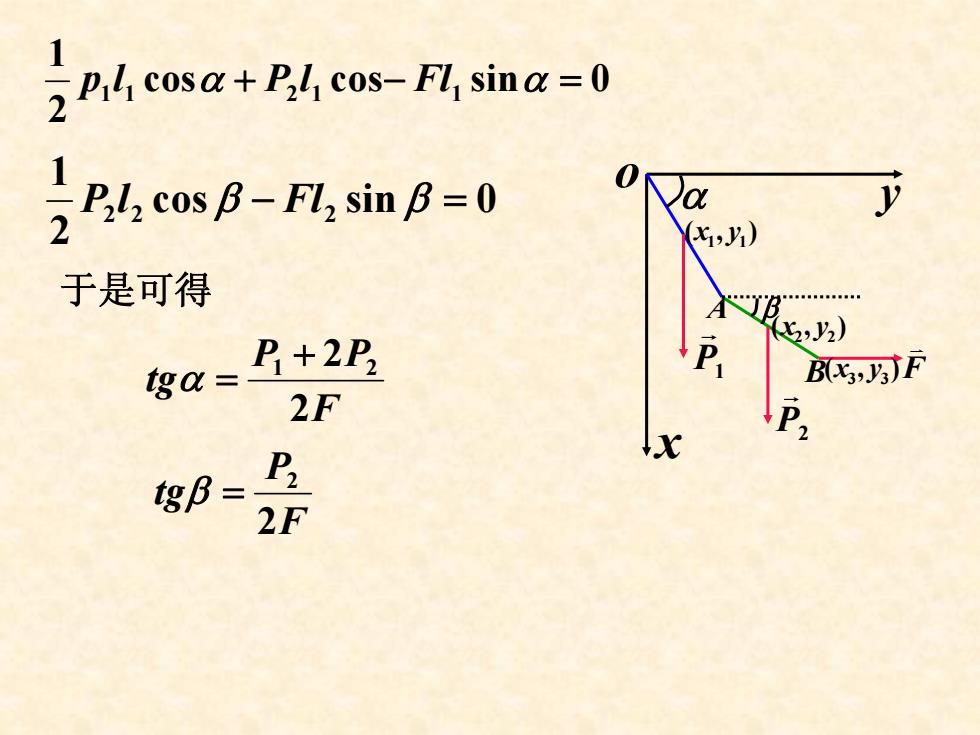
cosa+P.l cos-F7 sing P cosB-Fl sin B=0 于是可得 tga= P+2P2 Bs,ys)F 2F tgB= P 2F
cos 0sincos 2 1 11 α 12 −+ FllPlp 1 α = cos 0sin 2 1 22 β − FllP 2 β = F PP tg 2 2 + 21 α = F P tg 2 2 β = 于是可得 o x y P1 G P2 G A B F K α β ),( 11 yx ),( 22 yx ),( 33 yx