以上两个方程就是刚体运动的基本微分方程,刚 体由六个独立变量,其运动微分方程给出的六个式子 正好可以确定刚体的运动情况。 刚体的动能定理可作为一个辅助方程代替上六个式 子中的任意一个。 刚体的动能定理:dT=∑FO.d而 i=1 注意:对刚体诸内力所作的元功之和为零. 当外力是保守力时:机械能守恒,有 T+V=E
以上两个方程就是刚体运动的基本微分方程,刚 体由六个独立变量,其运动微分方程给出的六个式子 正好可以确定刚体的运动情况。 刚体的动能定理可作为一个辅助方程代替上六个式 子中的任意一个。 刚体的动能定理: ( ) ∑= ⋅= n i i e i rdFdT 1 K K 注意:对刚体诸内力所作的元功之和为零 注意:对刚体诸内力所作的元功之和为零. . 当外力是保守力时 : 机械能守恒, 有 + = EVT
三、刚体平衡方程 我们知道作用于刚体上的力系总可简化为一个单 力和一个力偶矩,这个单力就是力系的主矢,这个力 偶矩就是力系中的力对简化中心的主矩,要是刚体处 于平衡状态,则其必要充分条件是: F=0 。-刚体的平衡方程 这个平衡方程也可表示为: Fx=0,F,=0,F,=0 Mx=0,M,=0,M,=0 若力系是共面力系,则平衡方程可简化为: F=0,F,=0,M,=0 若是共面共点力系:F,=0,F,=0
三、刚体平衡方程 我们知道作用于刚体上的力系总可简化为一个单 力和一个力偶矩,这个单力就是力系的主矢,这个力 偶矩就是力系中的力对简化中心的主矩,要是刚体处 于平衡状态,则其必要充分条件是: F = 0 K M = 0 K -刚体的平衡方程 这个平衡方程也可表示为: = = = 0,0,0 x FF y Fz M x = M y = Mz = 0,0,0 若力系是共面力系,则平衡方程可简化为: = = = 0,0,0 x FF y Mz 若是共面共点力系: = = 0,0 x FF y
例题1.P233(3.1) 解:根据平衡方程有 x:N cose-mg sin=0 (1) y:Ni sin0+N2-mg cos=0 (2) mg 对A:ms2cos8=N :(R为棒长) 3) 将(1)代入(2)得 N2 =mg cos0-mg sin20 将N,代入(3)得 cos0 m-oo-g 1=2c01-g20) g0-广-e22_42-c (c2)2 =别
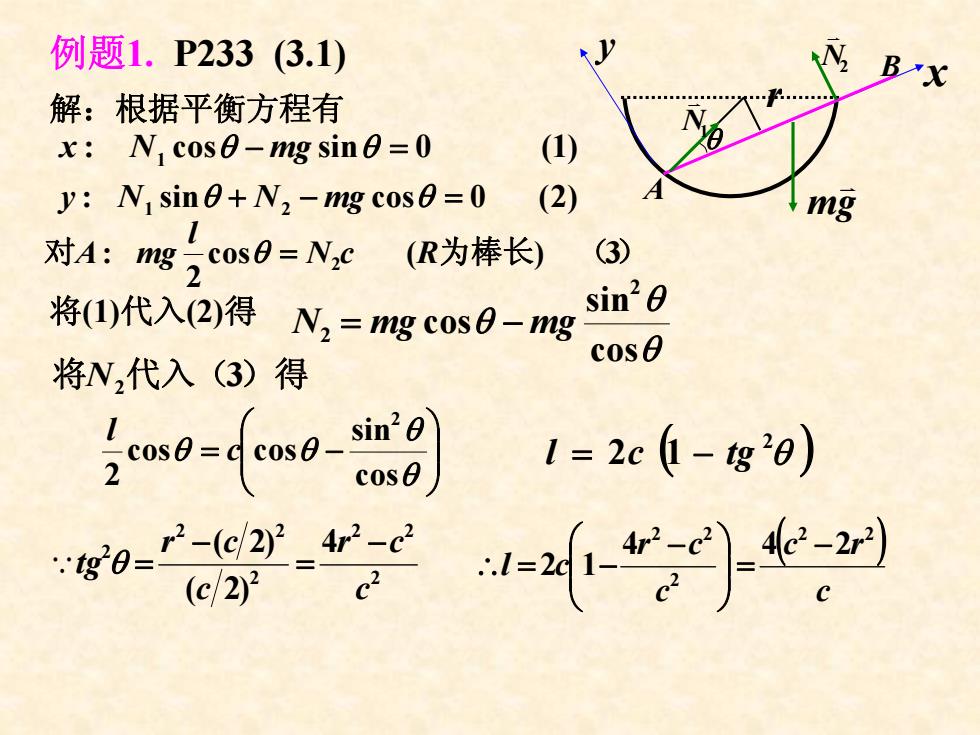
例题1. P233 (3.1) 解:根据平衡方程有 Nx 1 cos: θ − mg θ = )1(0sin sin: )2(0cos 1 θ + 2 − mgNNy θ = 对 cos 为棒长 3)( )( 2 : 2 RcN l mgA θ = 将(1)代入(2) 得 θ θ θ cos sin cos 2 2 mgN −= mg 将 N 2代入( 3)得 ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ −= θ θ θθ cos sin cos cos 2 2 c l ( θ ) 2 12 −= tgcl 2 22 2 2 2 2 4 )2( )2( c cr c cr tg − = − ∵ θ = ( ) c rc c cr cl 22 2 22 244 12 − =⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − ∴ −= x y gm K N1 K N2 K r θ A B
§5.转动惯量 研究刚体的运动着重在于研究它的转动,因此在刚体 动力学中经常用的是角动量定理。 一.刚体定点转动的角动量 刚体上的任意点P:对0点的角动量为 J:=i×m: 对整个刚体的角动量 J=∑J:=∑×m .可:=而×月 .j=∑m,区×(面×)川
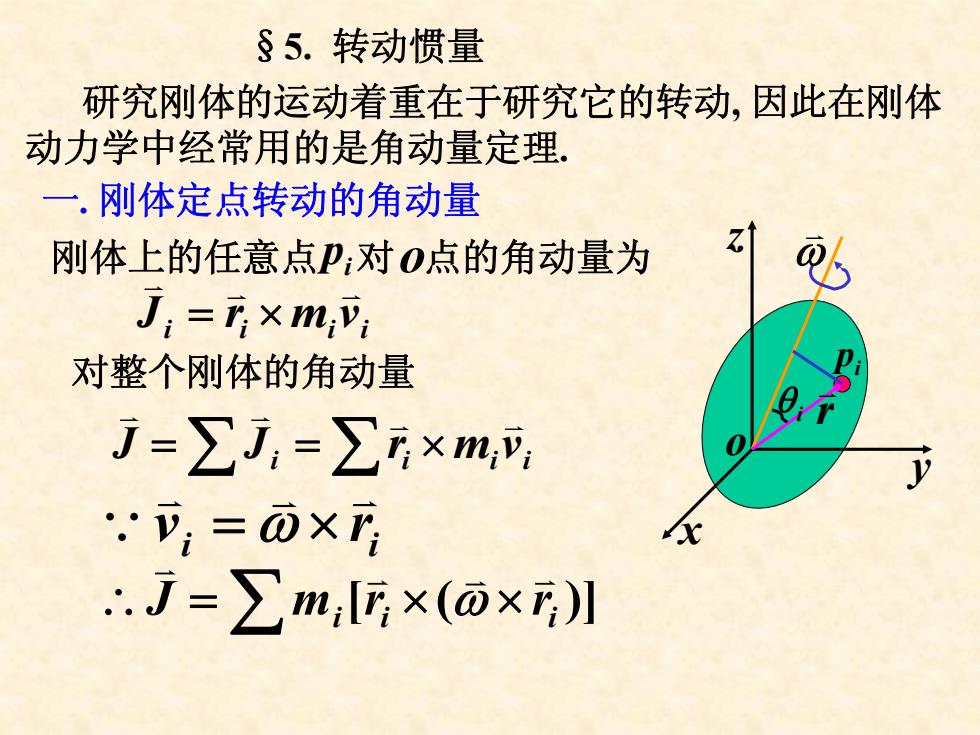
§5. 转动惯量 研究刚体的运动着重在于研究它的转动, 因此在刚体 动力学中经常用的是角动量定理. 一 . 刚体定点转动的角动量 θ i i p o x y z ωK r K 刚体上的任意点 对 点的角动量为 i p o iiii vmrJ K K K ×= i iii vmrJJ K K K K ∑ ∑ ×== 对整个刚体的角动量 i irv K K K ∵ =ω × )]([ ii irrmJ K K K K ∴ ∑ ω ××=
即:j=∑m,而-(ō)rl 这就是刚体定点转动中角动量的表达式 可见刚体定点转动中角动量j的方向与角速度ō的方 向一般不一致. 只有当而=0时:J才与同方向. 在直角坐标系中的分量表示 因:=x,i+y+z,k 而=0,i+0j+0k 故:j=∑m,(x+y好+z好)(oi+0,j+w,k) -(0七,+ωy:+0,)(x,i+y,j+z,k)】 Jx=∑ml0.(x+片+z好)-(@,+ω,+0,)x,l
])([ 2ii ii rrrmJK K K K K 即: = ∑ ωω ⋅− 这就是刚体定点转动中角动量的表达式. 可见刚体定点转动中角动量 的方向与角速度 的方 向一般不一致. J K ω K 只有当ω 0 才与时: ω同方向. K K K K Jri =⋅ 在直角坐标系中的分量表示 kzjyixr iiii K K K K 因: ++= kji zyx K K K K ++= ωωωω [( )( ) 222 故: zyxiiii kjizyxmJK K K K = ∑ ++++ ωωω ( )( kzjyixzyx )] iiiiziyix K K K ++− ωωω ++ ([ () ]) 222 x =∑ ω ++−++ ωωω xzyxzyxmJ iiziyixiiixi