目录 《现代控制理论》教学大纲.…4 《电子创新设计与应用》教学大纲…7 《走进深渊》教学大纲.…11 《徽机原理及接口技术》教学大纲…15 实习(实骏)学大纲.…20 ATLB基础及应用》敦学大纲.22 《传感器与现代检测技术》教学大纲..........…26 《船舶电力系统检测与分析》教学大纲(双语).30 《无人水面航行器技术概论》教学大纲…34 《电机与拖动基础》教学大纲.…37 《电力系统分析基础》教学大纲..43 《电略分折)教学大纲…7 《电路原理》教学大纲..51 实验教学大纲…56 实习(实践)教学大纲.… .69 《电子设计创新1》教学大纲… 62 《电子设计创新2》教学大纲..65 《电子设计自动化》教学大纲..68 《供电技术》教学大纲… .72 《供电技术课程设计》教学大纲…77 《控制电机》教学大纲.…79 《模拟电子技术实验(双语)》实验教学大纲..…84 实验教学大纲…。 ·90 《水下机器人技术》教学大纲..93
目 录 《现代控制理论》教学大纲 ................................................... 4 《电子创新设计与应用》教学大纲 .............................................. 7 《走进深渊》教学大纲 ...................................................... 11 《微机原理及接口技术》教学大纲 ............................................. 15 实习(实践)教学大纲 ...................................................... 20 《MATLAB 基础及应用》教学大纲 .............................................. 22 《传感器与现代检测技术》教学大纲 ........................................... 26 《船舶电力系统检测与分析》教学大纲(双语) ................................. 30 《无人水面航行器技术概论》教学大纲 ......................................... 34 《电机与拖动基础》教学大纲 ................................................ 37 《电力系统分析基础》教学大纲 .............................................. 43 《电路分析》教学大纲 ...................................................... 47 《电路原理》教学大纲 ...................................................... 51 实验教学大纲 .............................................................. 56 实习(实践)教学大纲 ...................................................... 59 《电子设计创新 1》教学大纲 ................................................. 62 《电子设计创新 2》教学大纲 ................................................. 65 《电子设计自动化》教学大纲 ................................................ 68 《供电技术》教学大纲 ...................................................... 72 《供电技术课程设计》 教学大纲 ............................................. 77 《控制电机》教学大纲 ...................................................... 79 《模拟电子技术实验(双语)》实验教学大纲 .................................... 84 实验教学大纲 .............................................................. 90 《水下机器人技术》教学大纲 ................................................ 93
《信号分析与处理》教学大纲.…97 《虚拟仪器技术》教学大纲.…101 习(实践)教学大纲…104 实习(实我)教学大纲.…129 实习(实践)教学大纲.…142 《电子技术基础》敦学大纲..182
《信号分析与处理》教学大纲 ................................................ 97 《虚拟仪器技术》教学大纲 ................................................. 101 习(实践)教学大纲 ....................................................... 104 实习(实践)教学大纲 ..................................................... 129 实习(实践)教学大纲 ..................................................... 142 《电子技术基础》教学大纲 ................................................. 182
《现代控制理论》教学大纲 课程名称(中文/英文):现代控制理论(Modern Control Theory) 课程编号:1203005 学分: 学时:总学时32 学时分配:讲授学时:32实验学时:0上机学时:0讨论学时:0其他学时:0 课程负责人:杨琛 一、课程简介 1、课程概况 《现代控制理论》课程是面向电气工程及其自动化专业开设的专业教有选修课。本课程 主要讲授现代控制理论的基本概念、定理和分析方法。以状态空间分析法为核心,介绍了线 性控制系统、动态系统等相关的控制问题。 通过本课程的学习,使学生掌握现代控制理论的基础知识,并能够对线性系统建立并求 解状态空间模型:能分析系统的能控性、能观性以及稳定性:初步了解利用状态空间模型分 析系统特性和校正系统的方法。为学生进一步学习与工作奠定坚实的控制理论基础。 "Moder Control Theory"is a specialized courses for students whose specialty is Electrical Engineering and Automation.This course mainly discusses basic concepts,theorems and analytical methods of the modem control theory.State space methods are the core of this course,which introduces linear control systems,dynamic systems and other relative control issues. By taking this course,students are expected to know its basic knowledge,establish and solve state space models of linear systems.They are also expected to analyze systems'controllability, observability and stability,and know how to analyze system's performance and rectify systems based on state space models.In this way they can have necessary control theoretical fundamentals for upper level courses and work in the future. 2、课程目标 2.1课程目标1:形成正确的价值观,具有大工程观、良好的职业道德和个人品质,为 中国智能制造2025培养具有工匠精神的新工科优秀人才: 2.2课程目标2:理解现代控制理论的基础知识,理解并掌握系统内状态空间分析法 理解系统的解:掌握系统能控性、能观性以及稳定性分析:并为后续课程学习准备必要的现 代控制的知识: 23课程目标3:培养学生的科学思维能力、自主学习能力和分析设计能力,树立理论 联系实际的工程意识,培养学生善于发现问题的探索能力和创新能力
《现代控制理论》教学大纲 课程名称(中文/英文):现代控制理论(Modern Control Theory) 课程编号: 1203005 学分:2 学时:总学时 32 学时分配:讲授学时:32 实验学时:0 上机学时:0讨论学时:0其他学时:0 课程负责人:杨琛 一、 课程简介 1、课程概况 《现代控制理论》课程是面向电气工程及其自动化专业开设的专业教育选修课。本课程 主要讲授现代控制理论的基本概念、定理和分析方法。以状态空间分析法为核心,介绍了线 性控制系统、动态系统等相关的控制问题。 通过本课程的学习,使学生掌握现代控制理论的基础知识,并能够对线性系统建立并求 解状态空间模型;能分析系统的能控性、能观性以及稳定性;初步了解利用状态空间模型分 析系统特性和校正系统的方法。为学生进一步学习与工作奠定坚实的控制理论基础。 “ Modern Control Theory ” is a specialized courses for students whose specialty is Electrical Engineering and Automation. This course mainly discusses basic concepts, theorems and analytical methods of the modern control theory. State space methods are the core of this course, which introduces linear control systems, dynamic systems and other relative control issues. By taking this course, students are expected to know its basic knowledge, establish and solve state space models of linear systems. They are also expected to analyze systems’controllability, observability and stability, and know how to analyze system’s performance and rectify systems based on state space models. In this way they can have necessary control theoretical fundamentals for upper level courses and work in the future. 2、课程目标 2.1 课程目标 1:形成正确的价值观,具有大工程观、良好的职业道德和个人品质,为 中国智能制造 2025 培养具有工匠精神的新工科优秀人才; 2.2 课程目标 2:理解现代控制理论的基础知识,理解并掌握系统内状态空间分析法; 理解系统的解;掌握系统能控性、能观性以及稳定性分析;并为后续课程学习准备必要的现 代控制的知识; 2.3 课程目标 3:培养学生的科学思维能力、自主学习能力和分析设计能力,树立理论 联系实际的工程意识,培养学生善于发现问题的探索能力和创新能力
二、教学内容 理论教学安排 对课程日标的支撑度 教学内容 学时 备注 2.12.223 】现代控制理论的产生与发展 代产理论经拉制理论的差异 2 22状态 间问表达式建立 2222;2.8:29 2.10:2.14:2.17 25线性(奇)变换 3.1线性 6 不变系统非齐次状态方程的解 7 参考作:4:45 5 参考作些:1 系统中应用 投的定其 三、教学方法 教学紧扣“课堂讲授、作业训练、考核”竿教学要素,灵活采用传统讲授、多媒体教学 MATLAB仿真 ,采用案例式等教学方法开展教学。 同时通 过保教学多考程资等生宽和深化学生的如面和如识结的 教学必须坚持“学生为主体,教师为主导”的思想,讲授时采用提问式,从解决实际矛 盾出发,提出的问题要恰当,要善于引导学生分析问题和解决问题,运用多媒体教学,生动、 信息量大,而且与板书相结合,开设讨论课、布置研究课题和读书笔记,有效引导学生思维。 学生必须注意自学,加强练习,注重软件仿真与理论的结合。在主要章节讲授完之后 要布置一定量习愿和思考题等,旨在加深学生对所学知识的理解、运用,拓宽学生的知识面。 本课程采用的教学媒体主要有:文字教材(包括主教材和学习指导书、电子教案、电 子课件,利用现代网络通讯手段,采用Emal、微信等交流工具,进行网上答疑,加强和学 生之间交流、讨论,拉近师生之间的距离。 教学过程中通过分享控制界大师的事迹,感悟伟大科学家的个人品质,培养学生良好的 职业道德和个人品质,激发爱国情怀,培育学生的爱国精神和创新精神
二、教学内容 理论教学安排 教学内容 学时 备注 对课程目标的支撑度 2.1 2.2 2.3 绪论 1.1 现代控制理论的产生与发展 1.2 现代控制理论的内容 1.3 现代控制理论与经典控制理论的差异 1.4 现代控制理论的应用 2 查阅与现代控制理论相关 的文献、科学家优秀事迹 √ √ 第 2 章 控制系统的状态空间描述 2.1 基本概念 2.2 状态空间表达式建立 2.3 传递函数(矩阵) 2.4 组合系统 2.5 线性(非奇异)变换 8 参考作业: 2.1;2.2;2.5; 2.8; 2.9; 2.10; 2.14; 2.17 √ √ 第 3 章 状态方程的解 3.1 线性时不变系统齐次状态方程的解 3.2 矩阵指数 3.3 线性时不变系统非齐次状态方程的解 6 参考作业: 3.1; 3.2;3.7 √ √ √ 第 4 章 线性系统的能控性和能观测性 4.2 定常连续系统的能控性 4.3 定常连续系统的能观性 4.5 能控性与能观性的对偶关系 4.6 线性定常系统的结构分解 4.7 能控性、能观性与传递函数矩阵的关系 7 参考作业: 4.1 ;4.5; 4.7; 4.15 √ √ √ 第 5 章 系统的李雅普诺夫稳定性分析 5.1 稳定性概念 5.2 李雅普诺夫稳定性理论 5.3 李亚普诺夫方法在线性系统中应用 5 参考作业: 5.1; 5.2; 5.11 √ √ √ 第 6 章 线性定常系统的综合 6.1 状态反馈的定义及其性质 6.2 极点配置 4 √ √ √ 三、教学方法 教学紧扣“课堂讲授、作业训练、考核”等教学要素,灵活采用传统讲授、多媒体教学、 MATLAB 仿真、课程资源上网等多种教学方式,采用案例式等教学方法开展教学。同时通 过提供教学参考资料、推荐课外阅读材料等拓宽和深化学生的知识面和知识结构。 教学必须坚持“学生为主体,教师为主导”的思想,讲授时采用提问式,从解决实际矛 盾出发,提出的问题要恰当,要善于引导学生分析问题和解决问题,运用多媒体教学,生动、 信息量大,而且与板书相结合,开设讨论课、布置研究课题和读书笔记,有效引导学生思维。 学生必须注意自学,加强练习,注重软件仿真与理论的结合。在主要章节讲授完之后, 要布置一定量习题和思考题等,旨在加深学生对所学知识的理解、运用,拓宽学生的知识面。 本课程采用的教学媒体主要有:文字教材(包括主教材和学习指导书)、电子教案、电 子课件,利用现代网络通讯手段,采用 E-mail、微信等交流工具,进行网上答疑,加强和学 生之间交流、讨论,拉近师生之间的距离。 教学过程中通过分享控制界大师的事迹,感悟伟大科学家的个人品质,培养学生良好的 职业道德和个人品质,激发爱国情怀,培育学生的爱国精神和创新精神
四、考核与评价方式及标准 课程考核由平时成绩与期末考试成绩相结合的方式进行, 1.平时成绩占比40%,主要包括:平时测验(20%)、平时表现(10%)及考勤作业等 (10%). 2.期末考核占比60%,采用闭卷考试,考核内容主要包括所有知识点80%以上 五、课程思政素材 对课程目标的支撑度 序号 课程思政素材 对应章节 教学方法 2.1 2.223 1 第引囊 讲授,图片,视频 2 我用制论创始人性学 第引警 讲授 从我国航空 天 3 第1 讲授、视频 六、参考教材和阅读书目 参考教材: 张嗣瀛主编,《现代控制理论》,清华大学出版社,2012年。 阅读书目: 刘豹,唐万生主编,《现代控制理论》,机械工业出版社,2006年: 方水良主编,《现代控制理论及其MATLAB实践》、,浙江大学出版社,2006年 高立群主编,《现代控制理论习题集》,清华大学出版社,2007年: 董振华主编,《奋斗:新时代是奋斗者的时代》,中共中央党校出版社,2018年。 七、本课程与其他课程的联系 本课程的先修课程主要有《线性代数》、《大学物理》、《自动控制原理》、《电路》等。 主撰人:杨琛 审核人:周悦霍海波 教学院长:郑兴伟 日期:2019年1月3日
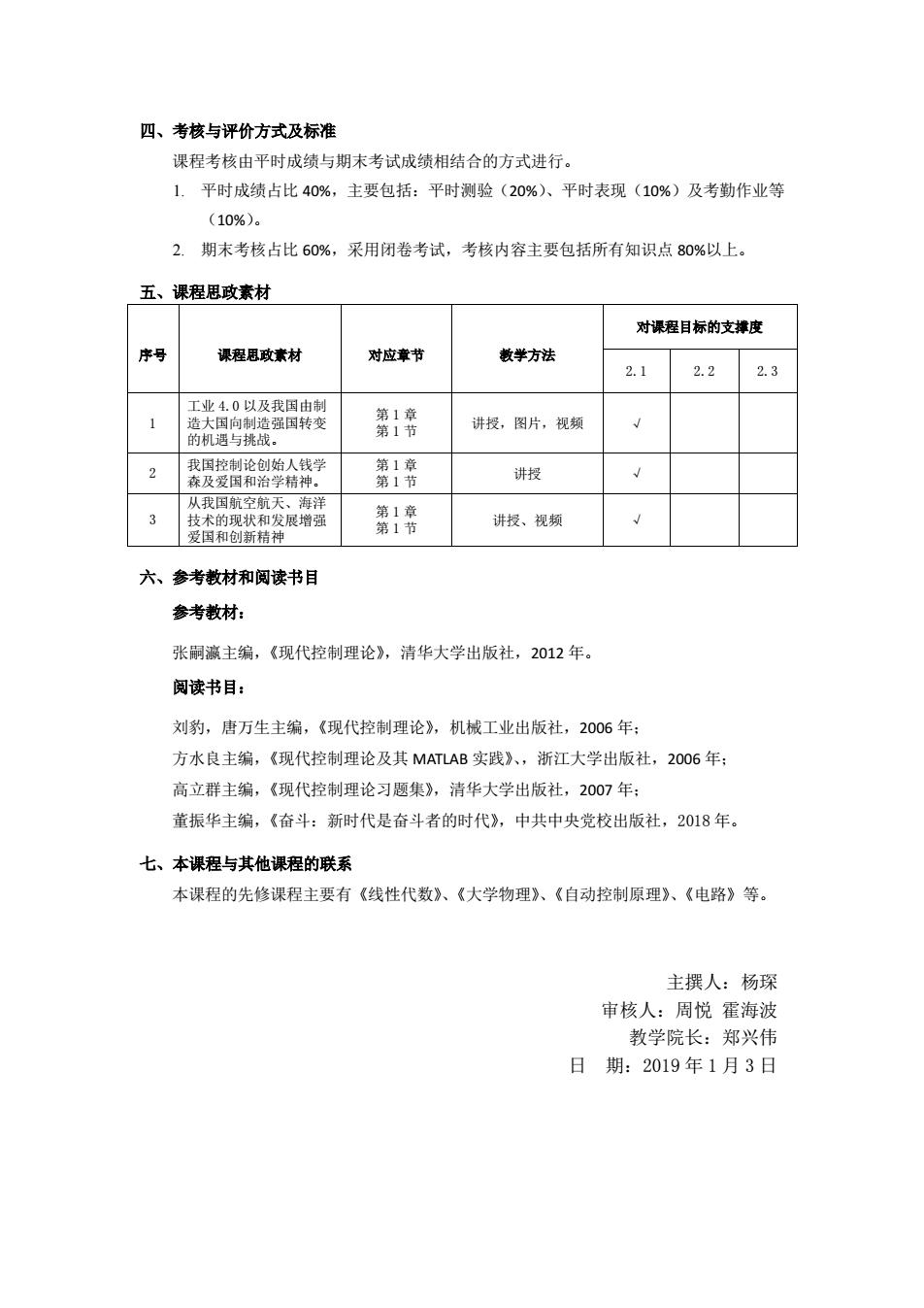
四、考核与评价方式及标准 课程考核由平时成绩与期末考试成绩相结合的方式进行。 1. 平时成绩占比 40%,主要包括:平时测验(20%)、平时表现(10%)及考勤作业等 (10%)。 2. 期末考核占比 60%,采用闭卷考试,考核内容主要包括所有知识点 80%以上。 五、课程思政素材 序号 课程思政素材 对应章节 教学方法 对课程目标的支撑度 2.1 2.2 2.3 1 工业 4.0 以及我国由制 造大国向制造强国转变 的机遇与挑战。 第 1 章 第 1 节 讲授,图片,视频 √ 2 我国控制论创始人钱学 森及爱国和治学精神。 第 1 章 第 1 节 讲授 √ 3 从我国航空航天、海洋 技术的现状和发展增强 爱国和创新精神 第 1 章 第 1 节 讲授、视频 √ 六、参考教材和阅读书目 参考教材: 张嗣瀛主编,《现代控制理论》,清华大学出版社,2012 年。 阅读书目: 刘豹,唐万生主编,《现代控制理论》,机械工业出版社,2006 年; 方水良主编,《现代控制理论及其 MATLAB 实践》、,浙江大学出版社,2006 年; 高立群主编,《现代控制理论习题集》,清华大学出版社,2007 年; 董振华主编,《奋斗:新时代是奋斗者的时代》,中共中央党校出版社,2018 年。 七、本课程与其他课程的联系 本课程的先修课程主要有《线性代数》、《大学物理》、《自动控制原理》、《电路》等。 主撰人:杨琛 审核人:周悦 霍海波 教学院长:郑兴伟 日 期:2019 年 1 月 3 日