第三节劳斯-霍尔维茨稳定性判据 稳定性是控制系统最重要的问题,也是对系统最基本 的要求。控制系统在实际运行中,总会受到外界和内部一 些因素的扰动,例如负载或能源的波动、环境条件的改变、 系统参数的变化等。如果系统不稳定,当它受到扰动时, 系统中各物理量就会偏离其平衡工作点,并随时间推移而 发散,即使扰动消失了,也不可能恢复原来的平衡状态。 因此,如何分析系统的稳定性并提出保证系统稳定的措施, 是控制理论的基本任务之一
第三节 劳斯-霍尔维茨稳定性判据 稳定性是控制系统最重要的问题,也是对系统最基本 的要求。控制系统在实际运行中,总会受到外界和内部一 些因素的扰动,例如负载或能源的波动、环境条件的改变、 系统参数的变化等。如果系统不稳定,当它受到扰动时, 系统中各物理量就会偏离其平衡工作点,并随时间推移而 发散,即使扰动消失了,也不可能恢复原来的平衡状态。 因此,如何分析系统的稳定性并提出保证系统稳定的措施, 是控制理论的基本任务之一
常用的稳定性分析方法有: 1.劳斯一赫尔维茨(Routh一Hurwitz)判据:这是一种 代数判据。它是根据系统特征方程式来判断特征根在S平 面的位置,来判断系统的稳定性 2.根轨迹法:这是一种利用图解来系统特征根的方法。 它是以系统开环传递函数的某一参数为变量化出闭环系统 的特征根在S平面的轨迹,从而全面了解闭环系统特征根 随该参数的变化情况。 3.奈魁斯特(Nyquist)判据:这是一种在复变函数理论 基础上建立起来的方法。它根据系统的开环频率特性确定 闭环系统的稳定性,同样避免了求解闭环系统特征根的困 难。这一方法在工程上是得到了比较广泛的应用。 4.李雅普诺夫方法上述几种方法主要适用于线性系统, 而李雅普诺夫方法不仅适用于线性系统,也适用于非线性 系统。该方法是根据李雅普诺夫函数的特征来决定系统的 稳定性
常用的稳定性分析方法有: 1. 劳斯-赫尔维茨(Routh-Hurwitz)判据:这是一种 代数判据。它是根据系统特征方程式来判断特征根在S平 面的位置,来判断系统的稳定性. 2. 根轨迹法:这是一种利用图解来系统特征根的方法。 它是以系统开环传递函数的某一参数为变量化出闭环系统 的特征根在S平面的轨迹,从而全面了解闭环系统特征根 随该参数的变化情况。 3. 奈魁斯特(Nyquist)判据:这是一种在复变函数理论 基础上建立起来的方法。它根据系统的开环频率特性确定 闭环系统的稳定性,同样避免了求解闭环系统特征根的困 难。这一方法在工程上是得到了比较广泛的应用。 4. 李雅普诺夫方法 上述几种方法主要适用于线性系统, 而李雅普诺夫方法不仅适用于线性系统,也适用于非线性 系统。该方法是根据李雅普诺夫函数的特征来决定系统的 稳定性
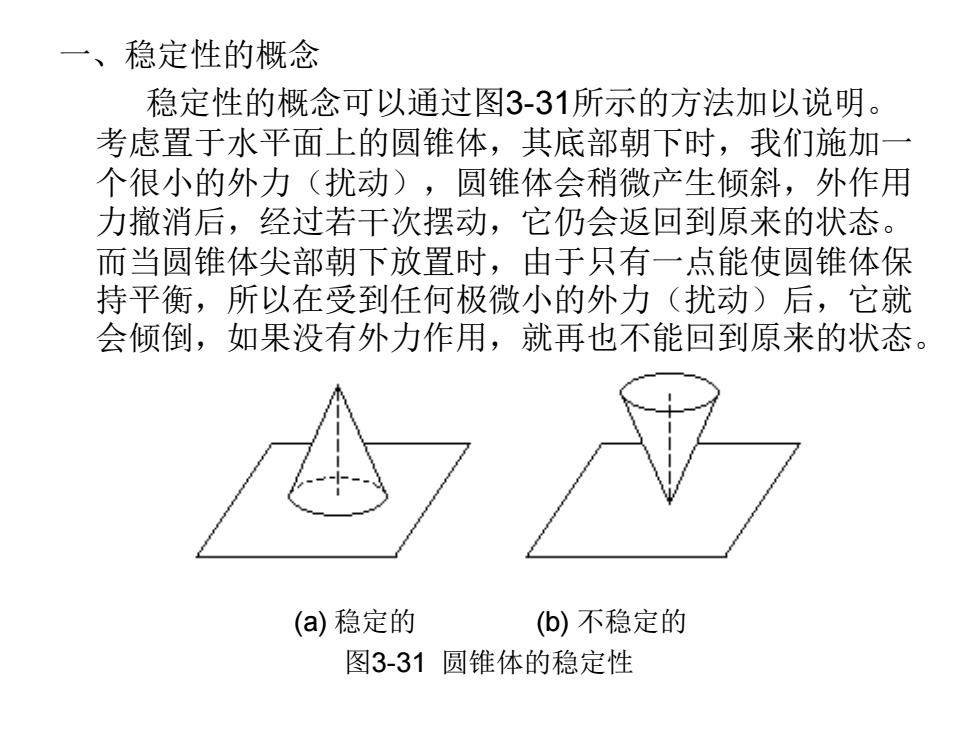
一、稳定性的概念 稳定性的概念可以通过图3-31所示的方法加以说明。 考虑置于水平面上的圆锥体,其底部朝下时,我们施加一 个很小的外力(扰动),圆锥体会稍微产生倾斜,外作用 力撤消后,经过若干次摆动,它仍会返回到原来的状态。 而当圆锥体尖部朝下放置时,由于只有一点能使圆锥体保 持平衡,所以在受到任何极微小的外力(扰动)后,它就 会倾倒,如果没有外力作用,就再也不能回到原来的状态。 (a)稳定的 (b)不稳定的 图3-31圆锥体的稳定性
一、稳定性的概念 稳定性的概念可以通过图3-31所示的方法加以说明。 考虑置于水平面上的圆锥体,其底部朝下时,我们施加一 个很小的外力(扰动),圆锥体会稍微产生倾斜,外作用 力撤消后,经过若干次摆动,它仍会返回到原来的状态。 而当圆锥体尖部朝下放置时,由于只有一点能使圆锥体保 持平衡,所以在受到任何极微小的外力(扰动)后,它就 会倾倒,如果没有外力作用,就再也不能回到原来的状态。 (a) 稳定的 (b) 不稳定的 图3-31 圆锥体的稳定性

因此,系统的稳定性定义为,系统在受到外作用力后, 偏离了最初的工作点,而当外作用力消失后,系统能够返 回到原来的工作点,则称系统是稳定的。 设系统在初始条件为零时,在单位理想脉冲作用下, 这时系统的脉冲响应为C()。若t→∞时,脉冲响应 limc() t>○ 这时,线性系统是稳定的。 设系统的特征方程D(S)=0的根为S,由于单位脉冲传 递函数的拉氏变换为1,系统输出的拉式变换为: C(s)=Gp(s)R(s) (s-2,) M(s) C(S)= D(s) ES-S (s-s,)Π(s2+25kws+w)
因此,系统的稳定性定义为,系统在受到外作用力后, 偏离了最初的工作点,而当外作用力消失后,系统能够返 回到原来的工作点,则称系统是稳定的。 设系统在初始条件为零时,在单位理想脉冲作用下, 这时系统的脉冲响应为c(t)。若t →∞时,脉冲响应 这时,线性系统是稳定的。 设系统的特征方程D(s)=0的根为si,由于单位脉冲传 递函数的拉氏变换为1,系统输出的拉式变换为: lim ( ) t c t → == 0 1 1 2 2 1 1 ( ) ( ) ( ) ( ) ( ) ( 2 ) m n i i i q r i i j k k k j k K s z M s A C s D s s s s s s w s w = = = = − = = = − − + + ( ) ( ) ( ) C s G s R s = B
C()=∑Ae+∑B.cos[(wV1-S)] 2-w sinf(Wk -5)t] 瞬态响应项表现为衰减、临界和发散三种情况之一,它是决定系 统稳定性的关键。由于输入量只影响到稳态响应,并且两者具有相 同的特性,即如果输入量)是有界的: |r(t)Koo,t≥0 则稳态响应也必定是有界的。则系统稳定性可以归结为,系统在 任何一个有界输入的作用下,其输出是否有界的问题。 一个稳定的系统定义为,在有界输入的作用下,其输 出响应也是有界的。这叫做有界输入有界输出稳定,又 简称为BIBO稳定
瞬态响应项表现为衰减、临界和发散三种情况之一,它是决定系 统稳定性的关键。由于输入量只影响到稳态响应,并且两者具有相 同的特性,即如果输入量r(t)是有界的: | r(t)|<∞, t ≥0 则稳态响应也必定是有界的。则系统稳定性可以归结为,系统在 任何一个有界输入的作用下,其输出是否有界的问题。 一个稳定的系统定义为,在有界输入的作用下,其输 出响应也是有界的。这叫做有界输入有界输出稳定,又 简称为BIBO稳定。 2 1 1 2 2 1 ( ) cos[( 1 ) ] sin[( 1 ) ] 1 i k k k k n r s t w t i k k k i k r k k k k w t k k k k k C t Ae B e w t C B w e w t w − = = − = = + − − + − −