一、 概述 瑞典学者K.J.Astrom在1983年首先把人工智能中的专家系统引入智 能控制领域,于1986年提出“专家控制”的概念,构成一种智能控制方 法。 专家控制(Expert Control)是智能控制的一个重要分支,又称专家 智能控制。所谓专家控制,是将专家系统的理论和技术同控制理论、方 法与技术相结合,在未知环境下,仿效专家的经验,实现对系统的控制。 Feigenbaum认为:专家系统的力量是从它处理的知识中产生的,而不 是从某种形式主义及其使用的参考模式中产生的
一、概述 瑞典学者K.J.Astrom在1983年首先把人工智能中的专家系统引入智 能控制领域,于1986年提出“专家控制”的概念,构成一种智能控制方 法。 专家控制(Expert Control)是智能控制的一个重要分支,又称专家 智能控制。所谓专家控制,是将专家系统的理论和技术同控制理论、方 法与技术相结合,在未知环境下,仿效专家的经验,实现对系统的控制。 Feigenbaum认为:专家系统的力量是从它处理的知识中产生的,而不 是从某种形式主义及其使用的参考模式中产生的
传统控制 专家控制 在传统控制系统中,系统的运行排 专家控制试图在传统控制的 斥了人的干预,人-机之间缺乏交互。 基础上“加入”一个富有经验的 控制器对被控对象在环境中的参数、 控制工程师,实现控制的功能, 结构的变化缺乏应变能力。 它由知识库和推理机构构成主体 传统控制理论的不足,在于它必须 框架,通过对控制领域知识(先 依赖于被控对象严格的数学模型,试 验经验、动态信息、目标等)的 图对精确模型来求取最优的控制效果。 获取与组织,按某种策略及时地 而实际的被控对象存在着许多难以建 选用恰当的规则进行推理输出, 模的因素。 实现对实际对象的控制
传统控制 专家控制 专家控制试图在传统控制的 基础上“加入”一个富有经验的 控制工程师,实现控制的功能, 它由知识库和推理机构构成主体 框架,通过对控制领域知识(先 验经验、动态信息、目标等)的 获取与组织,按某种策略及时地 选用恰当的规则进行推理输出, 实现对实际对象的控制。 在传统控制系统中,系统的运行排 斥了人的干预,人-机之间缺乏交互。 控制器对被控对象在环境中的参数、 结构的变化缺乏应变能力。 传统控制理论的不足,在于它必须 依赖于被控对象严格的数学模型,试 图对精确模型来求取最优的控制效果。 而实际的被控对象存在着许多难以建 模的因素
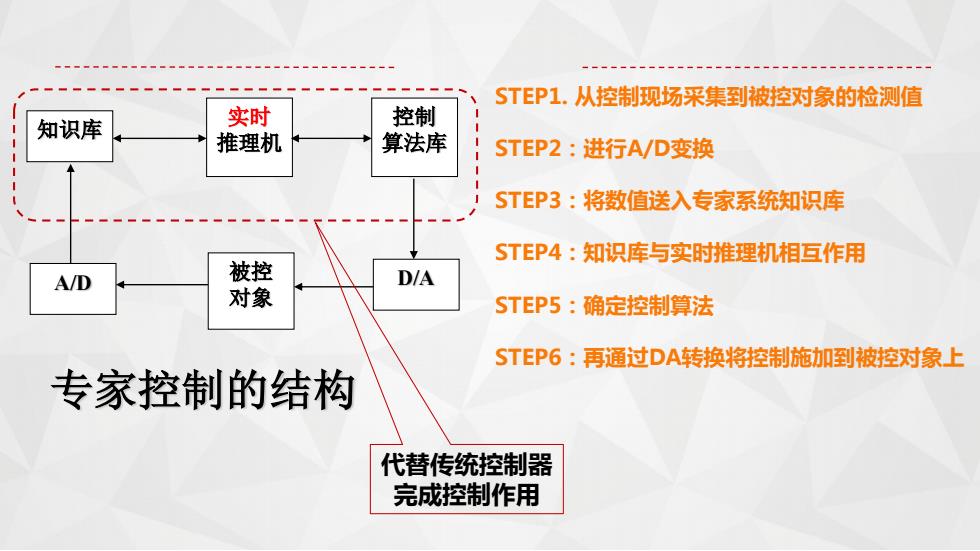
STEP1.从控制现场采集到被控对象的检测值 知识库 实时 控制 推理机 算法库 STEP2:进行A/D变换 STEP3:将数值送入专家系统知识库 STEP4:知识库与实时推理机相互作用 A/D 被控 D/A 对象 STEP5:确定控制算法 STEP6:再通过DA转换将控制施加到被控对象上 专家控制的结构 代替传统控制器 完成控制作用
知识库 实时 推理机 A/D 被控 对象 D/A 控制 算法库 专家控制的结构 STEP1. 从控制现场采集到被控对象的检测值 STEP2:进行A/D变换 STEP3:将数值送入专家系统知识库 STEP4:知识库与实时推理机相互作用 STEP5:确定控制算法 STEP6:再通过DA转换将控制施加到被控对象上 代替传统控制器 完成控制作用
专家系统 专家控制系统 进行独立的、实时的自动决策。 完成专门领域的咨询功能,辅助用户决策; 专家控制比专家系统对可靠性和抗 干扰性有着更高的要求。 辅助决策,离线工作方式 要求在线获取反馈信息,即要求在线 工作方式 结构复杂,研制代价高, 结构简单,研制代价低, 具有较好的性能,用于较高技术装置过程 技术性能可以满足工业生产一般要求。 专家控制系统的关键技术点 ()知识的表达方法: (2)从传感器中识别和获取定量的控制信号; (3)将定性知识转化为定量的控制信号: (4)控制知识和控制规则的获取
专家系统 专家控制系统 完成专门领域的咨询功能,辅助用户决策; 进行独立的、实时的自动决策。 专家控制比专家系统对可靠性和抗 干扰性有着更高的要求。 辅助决策,离线工作方式 要求在线获取反馈信息,即要求在线 工作方式 专家控制系统的关键技术点 (1) 知识的表达方法; (2)从传感器中识别和获取定量的控制信号; (3)将定性知识转化为定量的控制信号; (4)控制知识和控制规则的获取。 结构复杂,研制代价高, 具有较好的性能,用于较高技术装置过程 结构简单,研制代价低, 技术性能可以满足工业生产一般要求
2.优点 (1)能够满足任意动态过程的控制需要,尤其适用于带有 时变、非线性和强干扰的控制; (2)控制过程可以利用对象的先验知识; (3)通过修改、增加控制规则,可不断积累知识,改进控 制性能; (4)可以定性地描述控制系统的性能,如“超调小”、 “偏差增大”等; (5)对控制性能可进行解释; (6)可通过对控制闭环中的单元进行故障检测来获取经验规则
2.优点 (1)能够满足任意动态过程的控制需要,尤其适用于带有 时变、非线性和强干扰的控制; (2)控制过程可以利用对象的先验知识; (3)通过修改、增加控制规则,可不断积累知识,改进控 制性能; (4)可以定性地描述控制系统的性能,如“超调小” 、 “偏差增大”等; (5)对控制性能可进行解释; (6)可通过对控制闭环中的单元进行故障检测来获取经验规则