§4-3系统开环频率特性的绘制 系统的开环频率特性在系统的分析与综合中有 很重要的意义,本节将通过一些示例介绍系统的开 环频率特性(极坐标图和伯德图)的绘制方法和步 骤。 自动控制系统通常由若干典型环节组成,根据 它们的基本特性,可以把系统分解成一些典型环节 串联的形式,再把这些典型环节的频率特性组合起 来得到整个系统的开环频率特性。因此,绘制系统 开环频率特性的基本步骤是将系统的开环传递函数 分解成若干典型环节的串联形式
1 §4-3 系统开环频率特性的绘制 系统的开环频率特性在系统的分析与综合中有 很重要的意义,本节将通过一些示例介绍系统的开 环频率特性(极坐标图和伯德图)的绘制方法和步 骤。 自动控制系统通常由若干典型环节组成,根据 它们的基本特性,可以把系统分解成一些典型环节 串联的形式,再把这些典型环节的频率特性组合起 来得到整个系统的开环频率特性。因此,绘制系统 开环频率特性的基本步骤是将系统的开环传递函数 分解成若干典型环节的串联形式
一、 绘制系统开环频率特性-极坐标图(Nyquist)的 步骤 1. 将系统开环传递函数分解成若干典型环节的串联形式: 2. 典型环节幅频特性相乘得到系统开环幅频特性; 3. 典型环节相频特性相加得到系统开环相频特性; 4. 如幅频特性有渐近线,则根据开环频率特性表达式的实部 和虚部,求出渐近线; 5.最后在G(jw)(jω)平面上绘制出系统的极坐标图。 2
2 一、绘制系统开环频率特性---极坐标图(Nyquist)的 步骤 1. 将系统开环传递函数分解成若干典型环节的串联形式; 2. 典型环节幅频特性相乘得到系统开环幅频特性; 3. 典型环节相频特性相加得到系统开环相频特性; 4. 如幅频特性有渐近线,则根据开环频率特性表达式的实部 和虚部,求出渐近线; 5. 最后在G(jω)H(jω)平面上绘制出系统的极坐标图
二、绘制系统开环频率特性--伯德图(Bode)的步骤 1.将系统的开环传递函数写成典型环节乘积的形式: 2. 如果存在交接频率,在ω轴上标出交接频率的坐标位置; 3. 由各典型环节的对数幅频特性叠加后得到系统开环对数幅 频特性的渐近线; 4. 修正误差,画出比较精确的对数幅频特性; 5. 画出各串联典型环节相频特性,将它们相加后得到系统开 环相频特性。 3
3 1. 将系统的开环传递函数写成典型环节乘积的形式; 2. 如果存在交接频率,在ω轴上标出交接频率的坐标位置; 3. 由各典型环节的对数幅频特性叠加后得到系统开环对数幅 频特性的渐近线; 4. 修正误差,画出比较精确的对数幅频特性; 5. 画出各串联典型环节相频特性,将它们相加后得到系统开 环相频特性。 二、绘制系统开环频率特性---伯德图(Bode)的步骤
例4-1已知系统的开环传递函数为 G(s)H(s)=K· (T>T) Ts+1 Ts+1 它由一个放大环节和两个惯性环节串联而成,其对应的 频率特性是 G(j@)H(jo)=K.- jTo+1 jT@+1 幅频特性和相频特性分别为 1 G(jo)H(jo)=K.- T202+1 T202+1 LG(j@)H(jw)--arctgTo-arctgT:0--arctgT (Ti+T2)0 4
4 例4-1 已知系统的开环传递函数为 它由一个放大环节和两个惯性环节串联而成,其对应的 频率特性是 幅频特性和相频特性分别为 1 1 1 1 ( ) ( ) 1 2 + + = j T j T G j H j K 1 1 1 1 ( ) ( ) 2 2 2 2 2 1 + + = T T G j H j K 2 1 2 1 2 1 2 1 ( ) ( ) ( ) T T T T G j H j arctgT arctgT arctg − + = − − = − ( ) 1 1 1 1 ( ) ( ) 1 2 1 2 T T T s T s G s H s K + + =
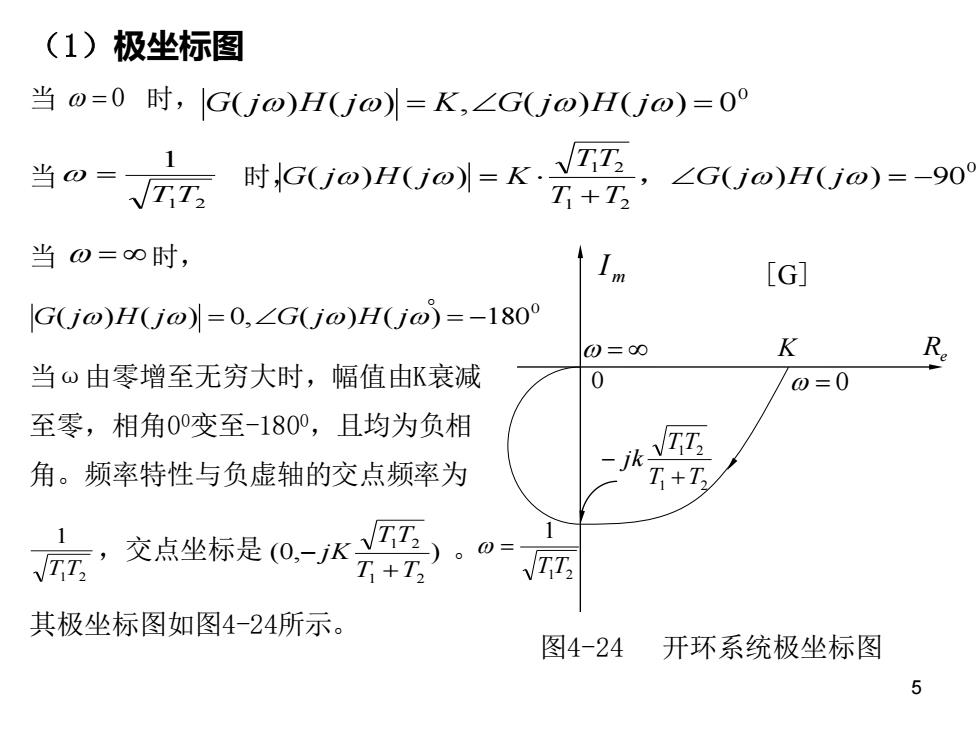
(1)极坐标图 当0=0时,lG(jo)H(jo)=K,∠G(jo)H(jo)=0° 当D= √TT3 时G(Jo)HUo=K,YT西 ,∠G(jo)H(jo)=-90° T+T 当0=∞时, [G] G(jo)H(jo)=0,∠G(Uo)H(jo=-180° 0=0 K 当o由零增至无穷大时,幅值由K衰减 0 0=0 至零,相角0变至-180°,且均为负相 角。频率特性与负虚轴的交点频率为 -k☑ T+T2 元,交点坐标是(0-k亚)。a T+T 其极坐标图如图4-24所示。 图4-24 开环系统极坐标图 5
5 (1)极坐标图 当 时, 当 时, 当 时, 。 当ω由零增至无穷大时,幅值由K衰减 至零,相角0 0变至-1800 ,且均为负相 角。频率特性与负虚轴的交点频率为 ,交点坐标是 。 其极坐标图如图4-24所示。 = 0 = 0 G( j)H( j) = 0,G( j)H( j) = −180 1 2 1 T T (0, ) 1 2 1 2 T T T T jK + − 0 1 2 1 2 ( ) ( ) ( ) ( ) = −90 + = G j H j T T TT G j H j K , 1 2 1 T T = 0 G( j)H( j) = K,G( j)H( j) = 0 = 0 = 0 1 2 1 2 T T TT jk + − 1 2 1 TT = m I K Re 图4-24 开环系统极坐标图 [G]