第三节线性二自由度汽车模型对前轮角输入的响应2.稳态响应的三种类型1)中性转向u/LO当K-0时,由S1+ Ku0= u/ Lu/R.R=LLSS>R与u无关,汽车具有中性转向的特性11汽车理论(第5版)教学课件中国农业大学编制
11 = u L s r L u R u = / L R = ➢ R 与 u 无关,汽车具有中性转向的特性。 1)中性转向 当 K=0 时,由 第三节 线性二自由度汽车模型对前轮角输入的响应 2.稳态响应的三种类型 r 2 s 1 u L Ku = +
第三节线性二自由度汽车模型对前轮角输入的响应>当汽车低速转向时,离心力很小,F和F也很小。α = α2 = 0S~ L/ RoRo~L/Su>中性转向汽车的转向8半径R等于汽车以极低车速转向(忽略侧偏角)Ro时的转向半径Ro。12汽车理论(第5版)教学课件中国农业大学编制
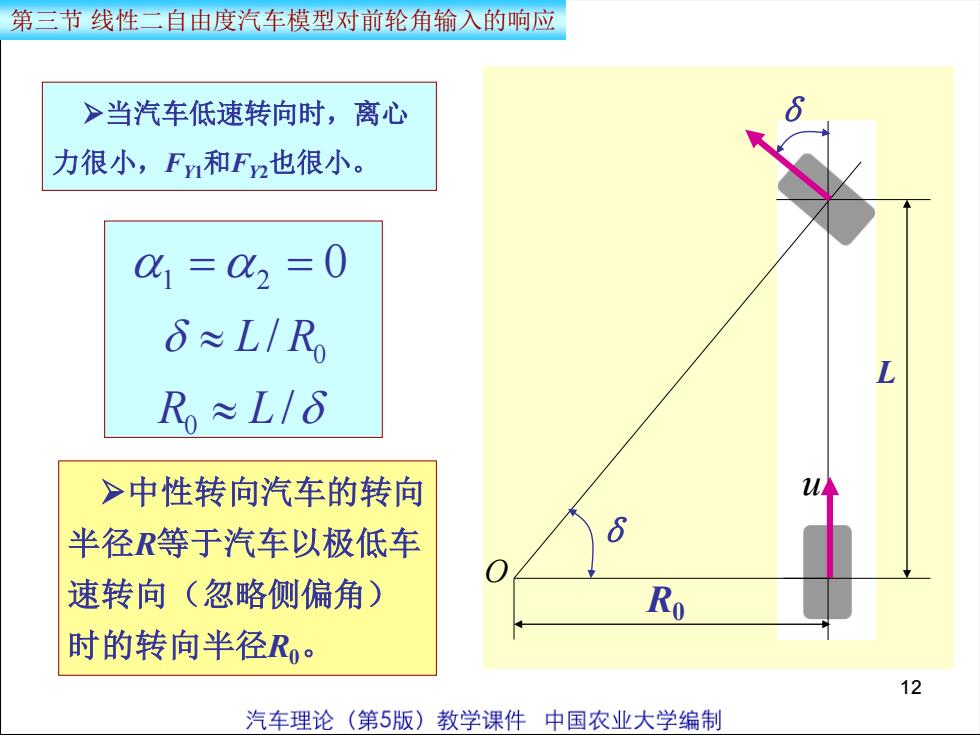
12 1 =2 = 0 L δ δ R0 u O 0 L / R R0 L / ➢当汽车低速转向时,离心 力很小,FY1和FY2也很小。 ➢中性转向汽车的转向 半径R等于汽车以极低车 速转向(忽略侧偏角) 时的转向半径R0。 第三节 线性二自由度汽车模型对前轮角输入的响应
第三节线性二自由度汽车模型对前轮角输入的响应2)不足转向u/L1+Ku2>1当K>0时,由1+Ku1横摆角速度增益比中性转向时要小。Ou/Lu/R当ueh=//K>maxS1+Ku?S>横摆角速度增益为与轴距L相等R= (1+ Ku2)= R (1+ Ku)的中性转向汽车横摆角速度增益的一半。由于K>0,所以R>R>u称为特征车速。当不足转向量且 u→R↑汽车具有不足转向特性增加时,K增大,特征车速降低。13汽车理论(第5版)教学课件中国农业大学编制
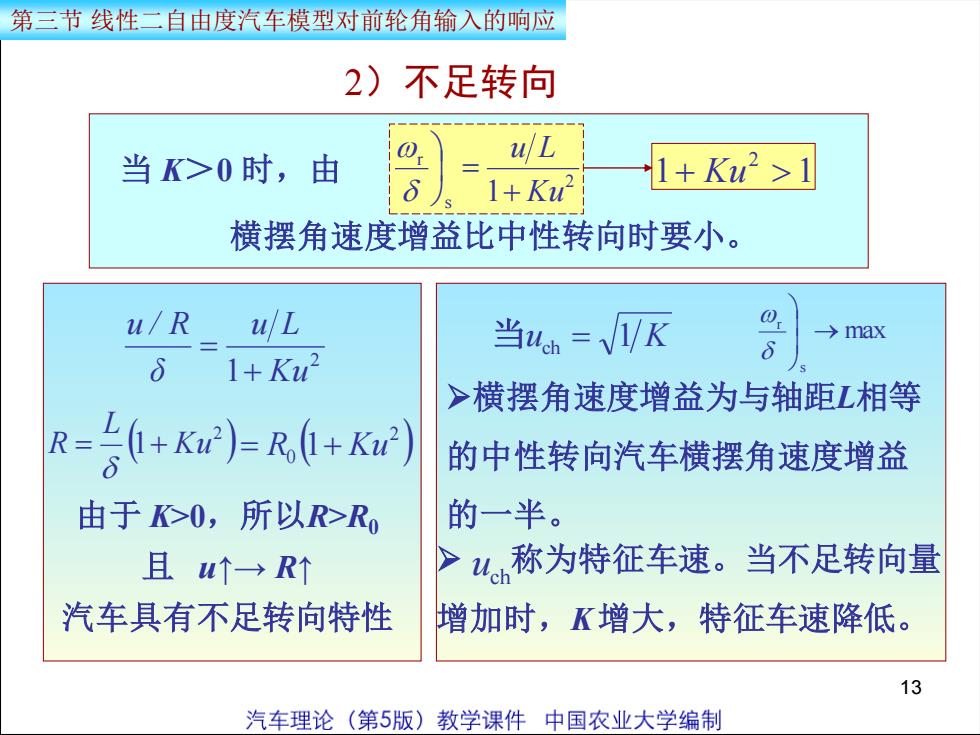
13 2 1 Ku u L δ u / R + = ( ) 2 1 Ku L R = + ( ) 2 0 = R 1+ Ku 由于 K>0,所以R>R0 且 u↑→ R↑ 汽车具有不足转向特性 当uch = 1 K max s r → ➢横摆角速度增益为与轴距L相等 的中性转向汽车横摆角速度增益 的一半。 ➢ 称为特征车速。当不足转向量 增加时,K 增大,特征车速降低。 2)不足转向 当 K>0 时,由 2 s r 1 Ku u L + = 1 1 2 + Ku 横摆角速度增益比中性转向时要小。 第三节 线性二自由度汽车模型对前轮角输入的响应 ch u
第三节线性二自由度汽车模型对前轮角输入的响应3)过多转向u/L0当K<0时,由1+Ku?<11+Ku?S0横摆角速度增益比中性转向时要大。8由R=R(1+ Ku2)R<Rou个→R→汽车具有过多转向特性。14汽车理论(第5版)教学课件中国农业大学编制
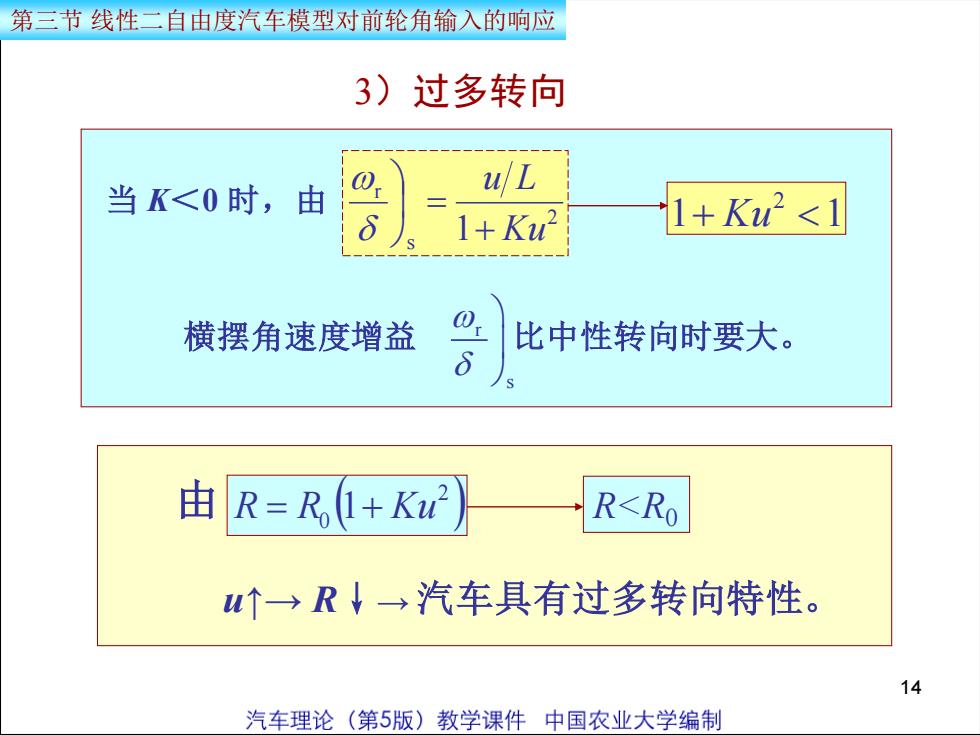
14 2 s r 1 Ku u L + = 1 1 2 + Ku 横摆角速度增益 r 比中性转向时要大。 s ( ) 2 0 由 R = R 1+ Ku R<R0 u↑→ R↓→ 汽车具有过多转向特性。 当 K<0 时,由 3)过多转向 第三节 线性二自由度汽车模型对前轮角输入的响应
第三节线性二自由度汽车模型对前轮角输入的响应u/L?1=1+Ku当车速为uer=/-1/K18S多这意味着很小的前轮转角将产生极大的横摆角速度汽车将发生激转而侧滑或侧翻。由于过多转向汽车有失去稳定性的危险,汽车应具有适度的不足转向特性。称为临界车速。临界车速越低,过多转向量越大。U.15汽车理论(第5版)教学课件中国农业大学编制
15 当车速为 cr u K = -1 → s r δ ω 这意味着很小的前轮转角将产生极大的横摆角速度, 汽车将发生激转而侧滑或侧翻。由于过多转向汽车有失 去稳定性的危险,汽车应具有适度的不足转向特性。 称为临界车速。临界车速越低,过多转向量越大。 r 2 s 1 u L Ku = + 第三节 线性二自由度汽车模型对前轮角输入的响应 cr u