第五章汽车的操纵稳定性第三节线性二自由度汽车模型对前轮角输入的响应>本节将首先建立线性二自由度汽车模型,在此基础上,分析汽车的稳态响应特性、瞬态响应特性和频率响应特性。汽车理论(第5版)教学课件中国农业大学编制
1 第五章 汽车的操纵稳定性 ➢本节将首先建立线性二自由度汽车模型,在此基础 上,分析汽车的稳态响应特性、瞬态响应特性和频率响 应特性。 第三节 线性二自由度汽车模型对前轮角输 入的响应
第三节线性二自由度汽车模型对前轮角输入的响应一、线性二自由度汽车模型运动微分方程思考:车辆坐标系中,汽车共有多少个自由度?1.建模中假设1)忽略转向系统的影响,直接以前轮转角作为输入:2)忽略悬架的作用;车身只作平行于地面的平面运动,绕,轴的位移、绕y轴的俯仰角和绕x轴的侧倾角均为零,且Fz=Fz;3)汽车前进速度不变。>在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮汽车模型。>假定汽车a≤0.4g,轮胎侧偏特性处于线性范围内:不计地面切向力Fx、外倾侧向力F回正力矩Tz、垂直载荷的变化对轮胎侧偏刚度的影响。汽车理论(第5版)教学课件中国农业大学编制
2 一、线性二自由度汽车模型运动微分方程 1.建模中假设 2)忽略悬架的作用;车身只作平行于地面的平面运动,绕z 轴的 位移、绕y 轴的俯仰角和绕 x 轴的侧倾角均为零,且 FZr = FZl ; 3)汽车前进速度不变。 第三节 线性二自由度汽车模型对前轮角输入的响应 思考:车辆坐标系中,汽车共有多少个自由度? ➢在上述假设下,汽车被简化为只有侧向和横摆两个自由度的两轮 汽车模型。 1)忽略转向系统的影响,直接以前轮转角作为输入; ➢假定汽车ay≤0.4g,轮胎侧偏特性处于线性范围内;不计地面切向 力FX、外倾侧向力 、回正力矩TZ、垂直载荷的变化对轮胎侧偏刚 度的影响。 F y
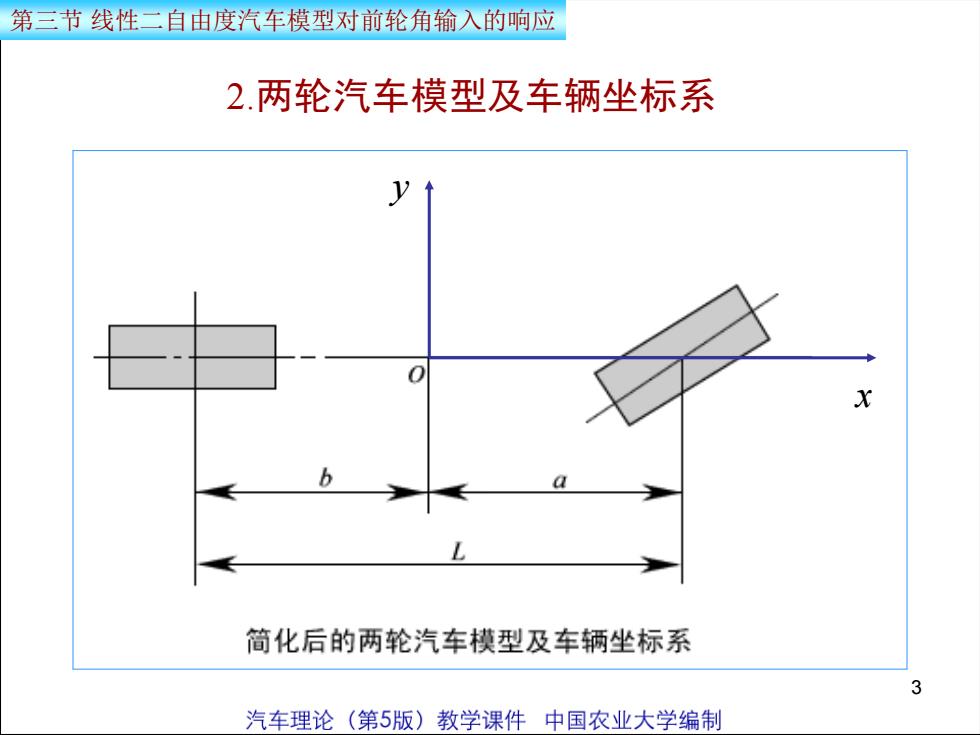
第三节线性二自由度汽车模型对前轮角输入的响应2.两轮汽车模型及车辆坐标系L0xH01简化后的两轮汽车模型及车辆坐标系3汽车理论(第5版)教学课件中国农业大学编制
3 x y 第三节 线性二自由度汽车模型对前轮角输入的响应 2.两轮汽车模型及车辆坐标系
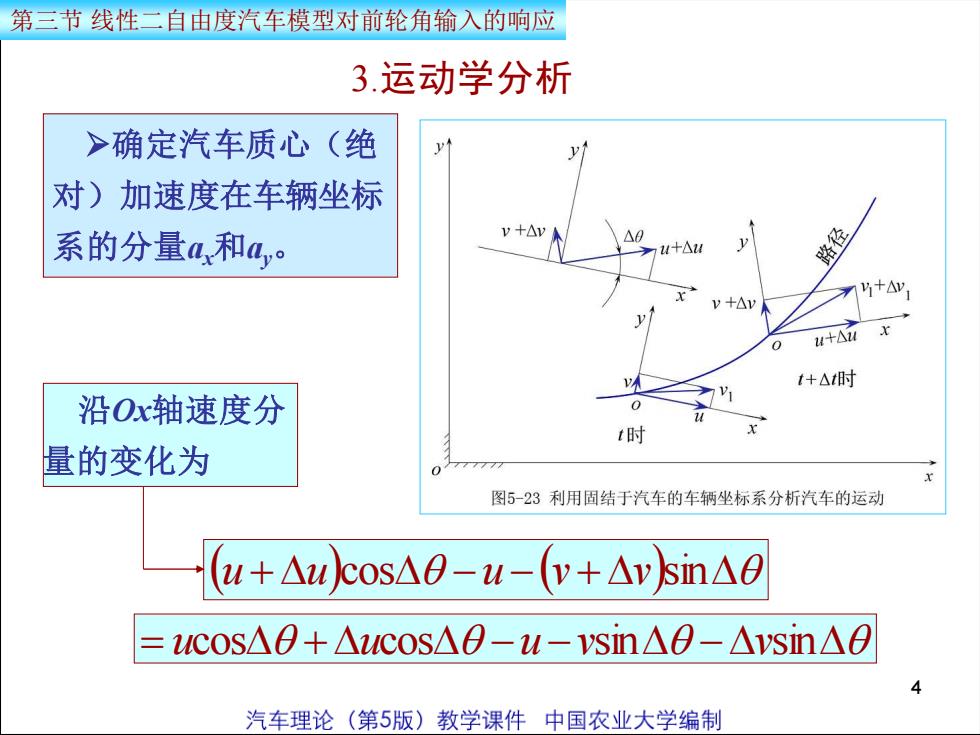
第三节线性二自由度汽车模型对前轮角输入的响应3.运动学分析>确定汽车质心(绝1对)加速度在车辆坐标V+AV40系的分量a和a,。ut+VV+AVu+Aut+△时沿0x轴速度分uX1时量的变化为图5-23利用固结于汽车的车辆坐标系分析汽车的运动(u+Au)cos0-u-(v+v)sinA0=ucos0+AucosA0-u-vsinAA-AvsinA4汽车理论(第5版)教学课件中国农业大学编制
4 ➢确定汽车质心(绝 对)加速度在车辆坐标 系的分量ax和ay。 (u +u)cos −u −(v +v)sin = ucos +ucos −u −vsin −vsin 第三节 线性二自由度汽车模型对前轮角输入的响应 3.运动学分析 沿Ox轴速度分 量的变化为
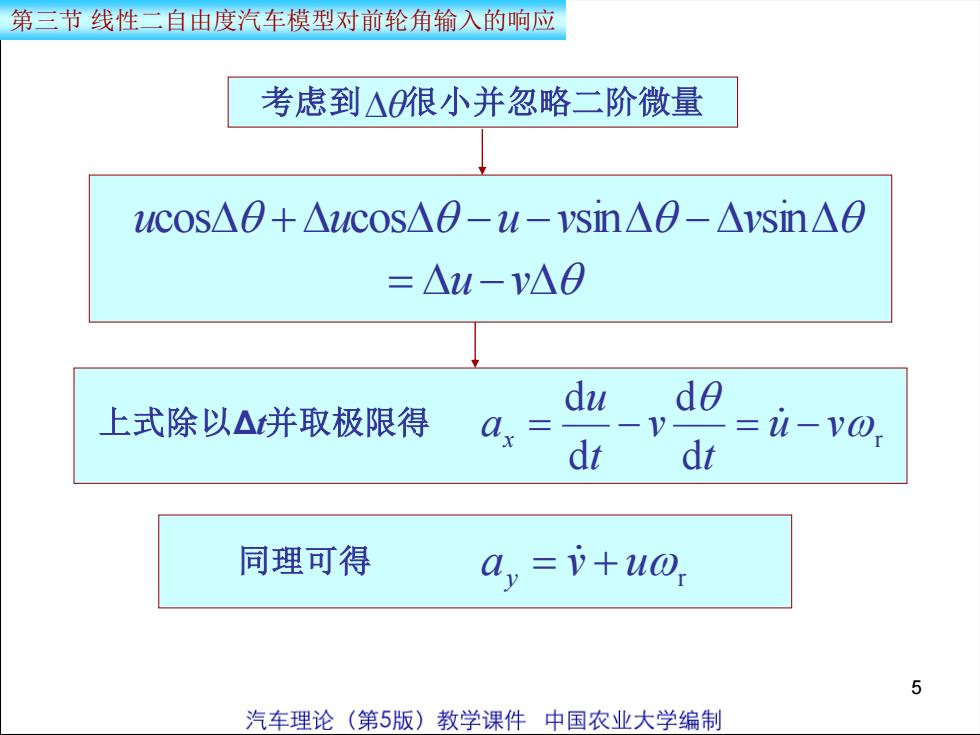
第三节线性二自由度汽车模型对前轮角输入的响应考虑到^很小并忽略二阶微量ucos +Aucos-u- vsin-△vsinA= u - v0dude上式除以A并取极限得i-vora.dtdt同理可得a, =i+uo,5汽车理论(第5版)教学课件中国农业大学编制
5 ucos +ucos −u −vsin −vsin = u −v 上式除以Δt并取极限得 r d d d d u v t v t u ax = − = − 考虑到 很小并忽略二阶微量 同理可得 r a v u y = + θ 第三节 线性二自由度汽车模型对前轮角输入的响应