第六章汽车的平顺性第五节双轴汽车的振动aZ2r22fAm2fZCm2rm2cafCfr>K汽车理论(第5版)教学课件中国农业大学编制
1 第六章 汽车的平顺性 第五节 双轴汽车的振动
第五节双轴汽车的振动一、振型分析24a22r =z。-atanp= z。-apZ2122f个0m2fm2-m2cz2r =z+btan β = z +bpqrALCfCLAeKr>>Krβ=(2r -22r)/ La)Z。=22 +ap122QN= Z2r +α(=2r - 22f)/L=(=2ra +=2rb)/Lb)图6-42车身振动模型思考:β与哪些因素有关?什么条件下其值最大?2汽车理论(第5版)教学课件中国农业大学编制
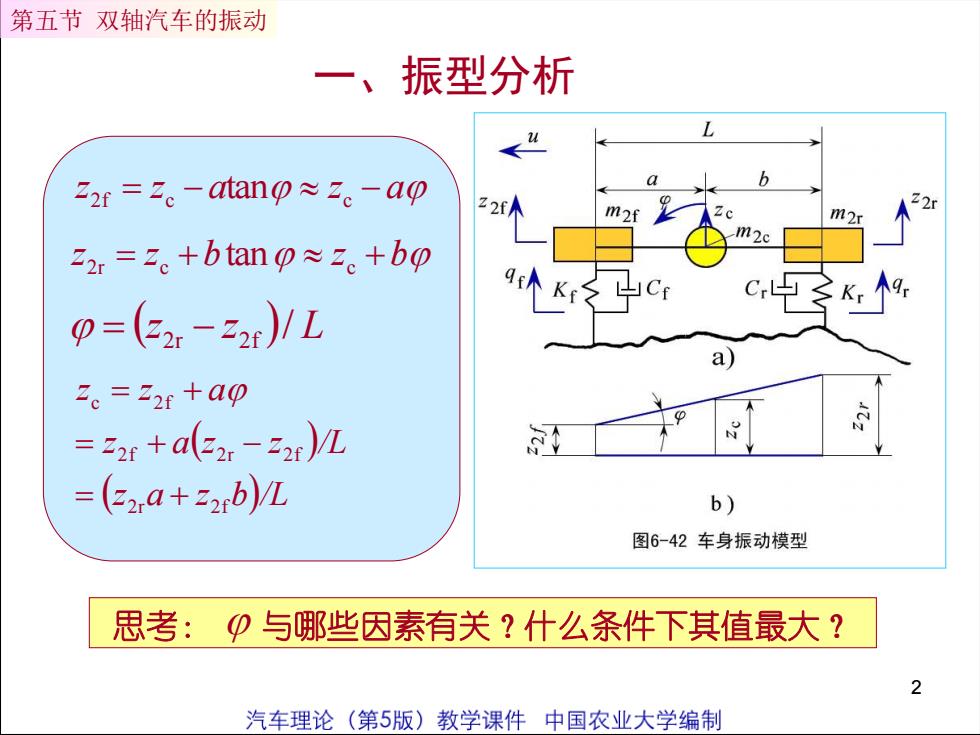
2 一、振型分析 z2f = zc − atan zc − a z2r = zc +b tan zc +b = (z2r − z2f )/ L ( ) (z a z b)/L z a z z /L z z a 2r 2f 2f 2r 2f c 2f = + = + − = + 思考: 与哪些因素有关?什么条件下其值最大? 第五节 双轴汽车的振动

第五节双轴汽车的振动1.采用z2fVZ2r坐标系时的无阻尼自由振动运动方程对前后端取力矩平衡,得m2r=2t +m2 b(22ra+ 2rb)/ L + Kμz2 =0m2r≥2r +m2b(z2ra+Z2rb)/ L +K,z2r =0当只有22运动K,L?GofKi0m(p+b22r=0前端部分系统的振型0or当只有22运动K,L?OorXm,(p+a?22f= 0后端部分系统的振型3汽车理论(第5版)教学课件中国农业大学编制
3 1.采用z2f、z2r 坐标系时的无阻尼自由振动运动方程 对前后端取力矩平衡,得 ( ) ( ) + + + = + + + = / 0 / 0 r 2 r 2 2 r 2 r 2 c 2 r 2 f f 2 f 2 2 f 2 f 2 c 2 r 2 f m z m b z a z b L K z m z m b z a z b L K z 当只有z2f运动 z2r = 0 当只有z2r运动 z2f = 0 ( ) 2 2 2 2 2 r 0r m a K L y + = 第五节 双轴汽车的振动 ( ) 2 2 2 2 2 f 0f m b K L y + =
第五节双轴汽车的振动系统的两个主频率r+0,FVor-or)+4Bror22122(1-β,β2(1-6)1-8B,5a8LI11>振动的节点在轴距之1外时,称为垂直振动型。口口>振动的节点在轴距之A内时,称为角振动型。口口4汽车理论(第5版)教学课件中国农业大学编制
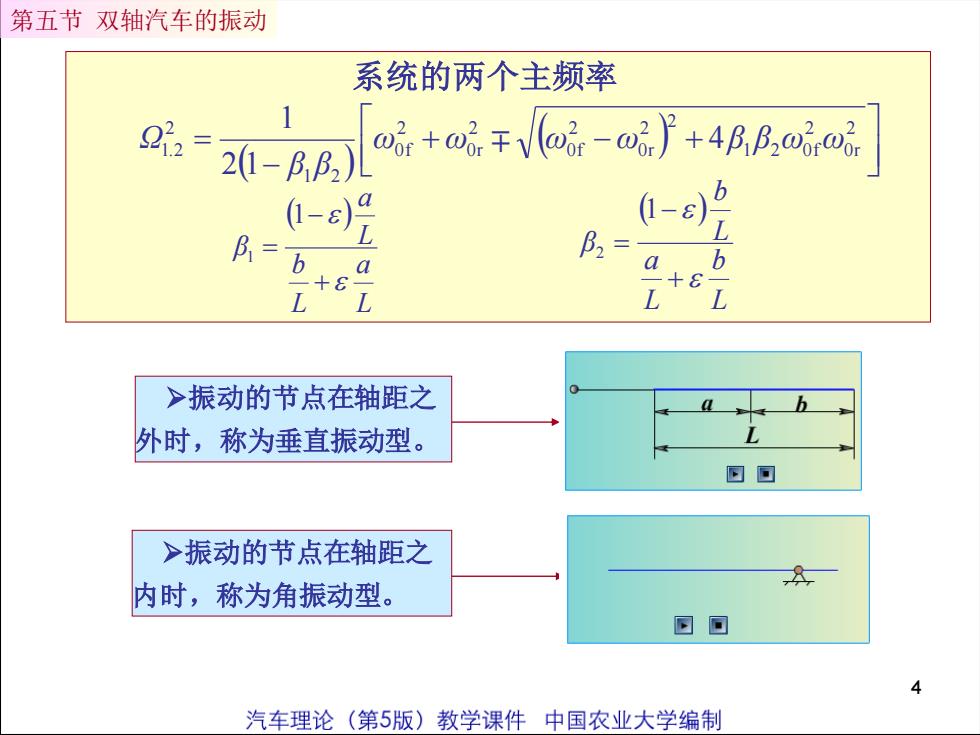
4 系统的两个主频率 ( ) ( ) + − + − = 2 0 r 2 1 2 0 f 2 2 0 r 2 0 f 2 0 r 2 0 f 1 2 2 1 2 4 2 1 1 ω ω ω ω β β ω ω β β Ω . ( ) L a L b L a β + − = 1 1 ( ) L b L a L b β + − = 1 2 第五节 双轴汽车的振动 ➢振动的节点在轴距之 内时,称为角振动型。 ➢振动的节点在轴距之 外时,称为垂直振动型
第五节双轴汽车的振动2.采用Z?坐标系时的无阻尼自由振动运动方程由垂直方向力的平衡和绕质心的力矩平衡,得m2=+(Kr + K)z。 +(K,b-Kra)p= 0m,p+(K,a? +K,b2)p+(K,b-Kra)z垂直方向固有圆频率K, +K.0m2角振动固有圆频率Kra?+ Kb2福m2P1汽车理论(第5版)教学课件中国农业大学编制
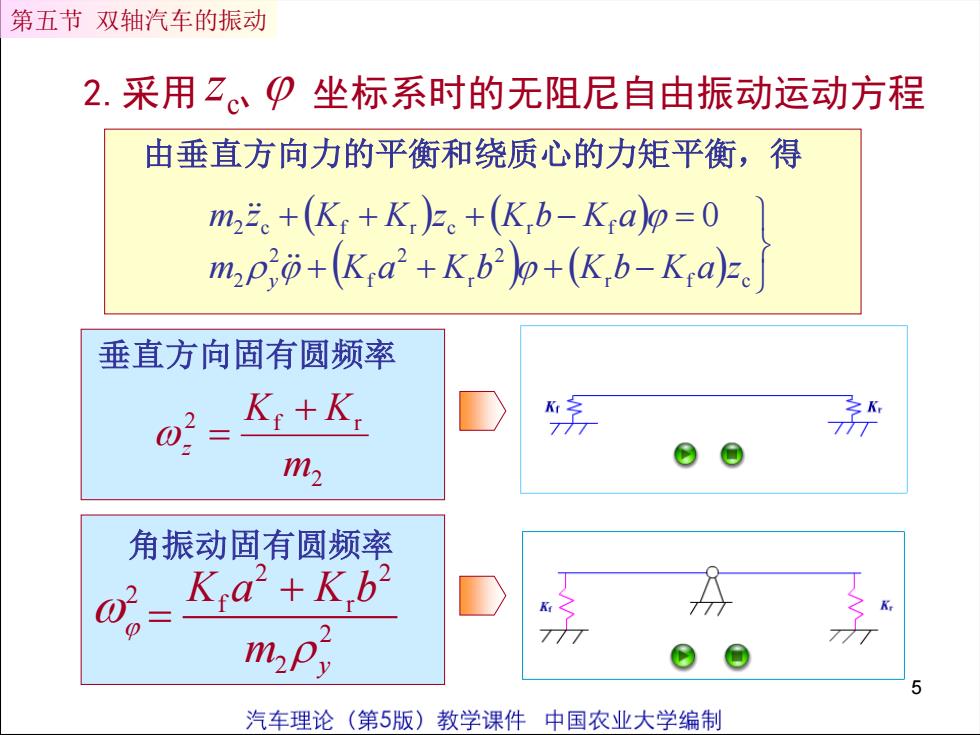
5 2.采用 、 坐标系时的无阻尼自由振动运动方程 由垂直方向力的平衡和绕质心的力矩平衡,得 ( ) ( ) ( ) ( ) + + + − + + + − = r f c 2 r 2 f 2 2 2 c f r c r f 0 m K a K b K b K a z m z K K z K b K a y 2 2 f r m K K z + = 2 2 f r 2 2 y K a K b m + = 垂直方向固有圆频率 角振动固有圆频率 第五节 双轴汽车的振动 c z 2