第五章汽车的操纵稳定性第七节提高操纵稳定性的电子控制系统>防抱死制动系统(ABS)与驱动力控制系统(TCS)都是提高汽车操纵稳定性的电子控制系统>目前有更多的电子控制系统能显著改善汽车的操纵稳定性。汽车理论(第5版)教学课件中国农业大学编制
1 第五章 汽车的操纵稳定性 ➢防抱死制动系统(ABS)与驱动力控制系统(TCS) 都是提高汽车操纵稳定性的电子控制系统。 ➢目前有更多的电子控制系统能显著改善汽车的操 纵稳定性。 第七节 提高操纵稳定性的电子控制系统
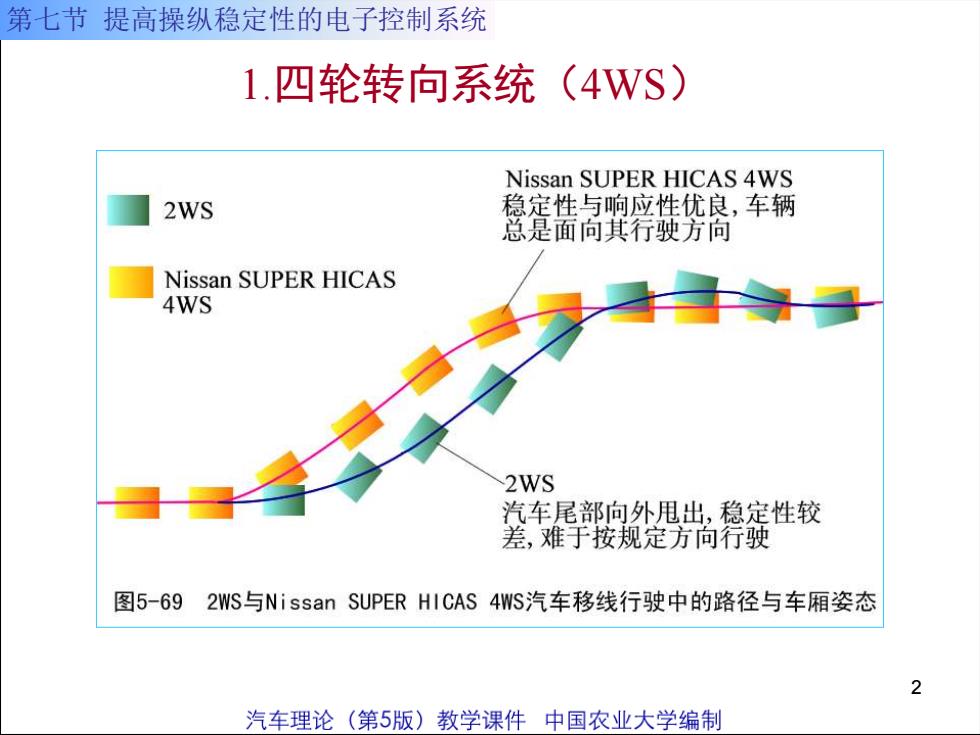
第七节提高操纵稳定性的电子控制系统1.四轮转向系统E(4WS)NissanSUPERHICAS4WS稳定性与响应性优良,车辆2WS总是面向其行驶方向Nissan SUPER HICAS4WS2WS汽车尾部向外甩出,稳定性较差,难于按规定方向行驶图5-692WS与NissanSUPERHICAS4WS汽车移线行驶中的路径与车厢姿态2汽车理论(第5版)教学课件中国农业大学编制
2 第七节 提高操纵稳定性的电子控制系统 1.四轮转向系统(4WS)
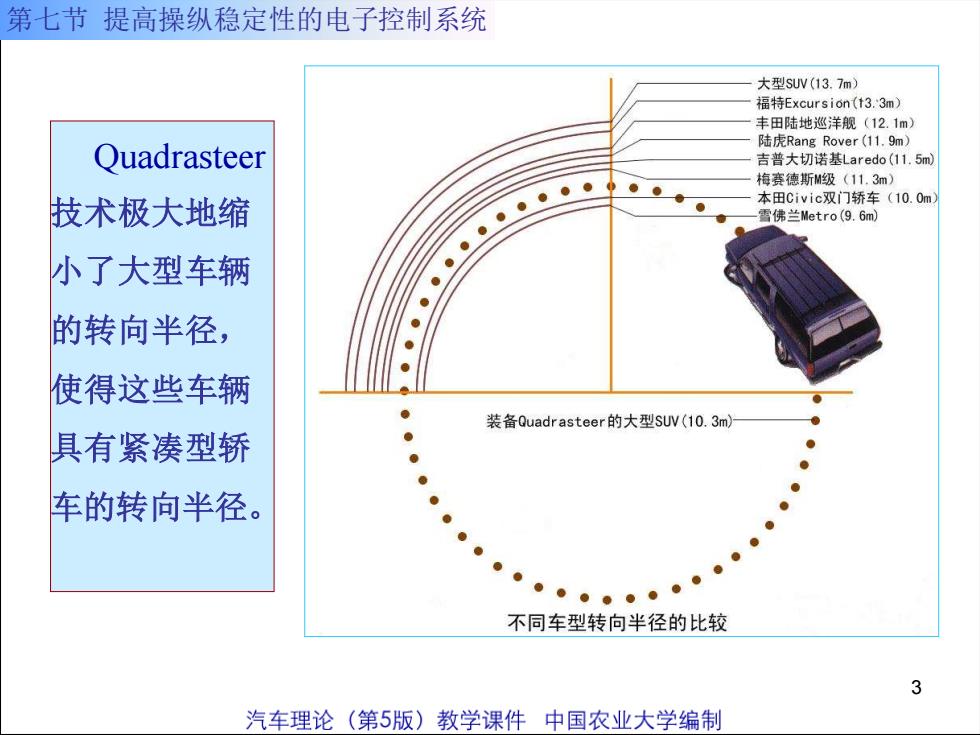
第七节 提高操纵稳定性的电子控制系统大型SUV(13.7m)福特Excursion(t3.:3m)丰田陆地巡洋舰(12.1m)陆虎RangRover(11.9m)Quadrasteer吉普大切诺基Laredo(11.5m)梅赛德斯M级(11.3m)本田Civic双门轿车(10.Om)技术极大地缩雪佛兰Metro(9.6m)小了大型车辆的转向半径,使得这些车辆装备Quadrasteer的大型suv(10.3m)具有紧凑型轿车的转向半径。不同车型转向半径的比较3汽车理论(第5版)教学课件中国农业大学编制
3 技术极大地缩 小了大型车辆 的转向半径, 使得这些车辆 具有紧凑型轿 车的转向半径。 第七节 提高操纵稳定性的电子控制系统 Quadrasteer
第七节提高操纵稳定性的电子控制系统(VSC或称ESP)2.车辆稳定性控制系统>系统是以ABS为基础发展而成的。>基本工作原理是:在大侧向加速度、大侧偏角的极限工况下,利用左右两侧制动力之差产生的横摆力偶矩来防止出现难以控制的侧滑现象。汽车理论(第5版)教学课件中国农业大学编制
4 第七节 提高操纵稳定性的电子控制系统 ➢系统是以ABS为基础发展而成的。 ➢基本工作原理是:在大侧向加速度、大侧偏角的极限 工况下,利用左右两侧制动力之差产生的横摆力偶矩来防 止出现难以控制的侧滑现象。 2.车辆稳定性控制系统(VSC或称ESP)
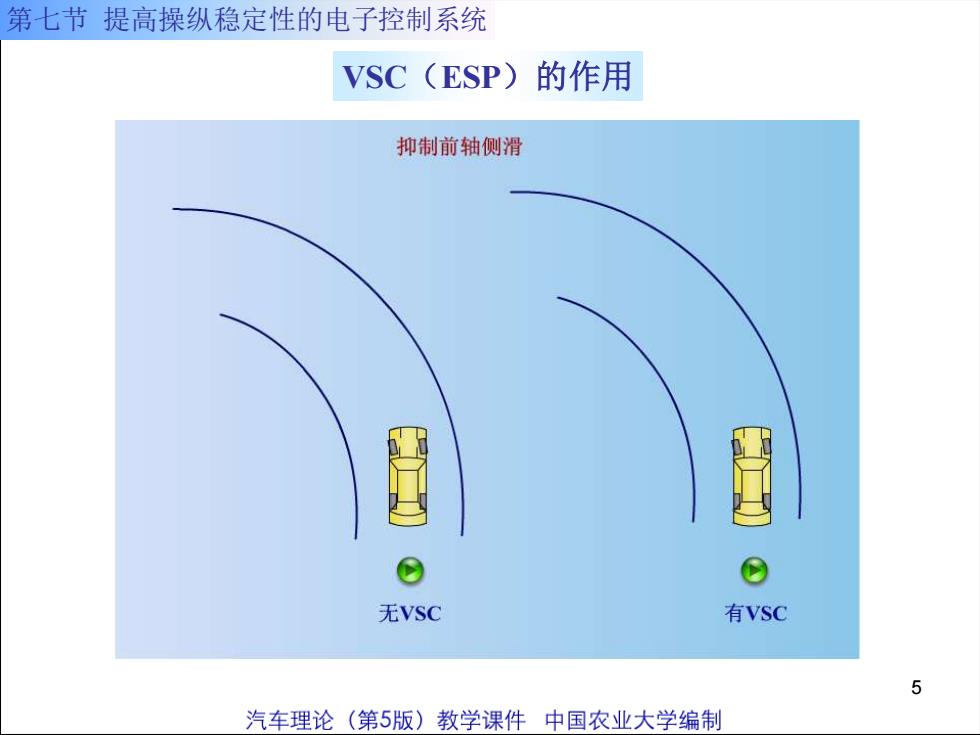
第七节 提高操纵稳定性的电子控制系统VSC(ESP)的作用抑制前轴侧滑无VSC有vSc5汽车理论(第5版)教学课件中国农业大学编制
5 第七节 提高操纵稳定性的电子控制系统 VSC(ESP)的作用