第五章汽车的操纵稳定性第六节汽车操纵稳定性与传动系的关系>本节将介绍地面切向反作用力对汽车稳态转向特性的影响,还将介绍利用地面切向反作用力控制转向特性的方法和原理。汽车理论(第5版)教学课件中国农业大学编制
1 第六节 汽车操纵稳定性与传动系的关系 第五章 汽车的操纵稳定性 ➢本节将介绍地面切向反作用力对汽车稳态转向特 性的影响,还将介绍利用地面切向反作用力控制转向 特性的方法和原理
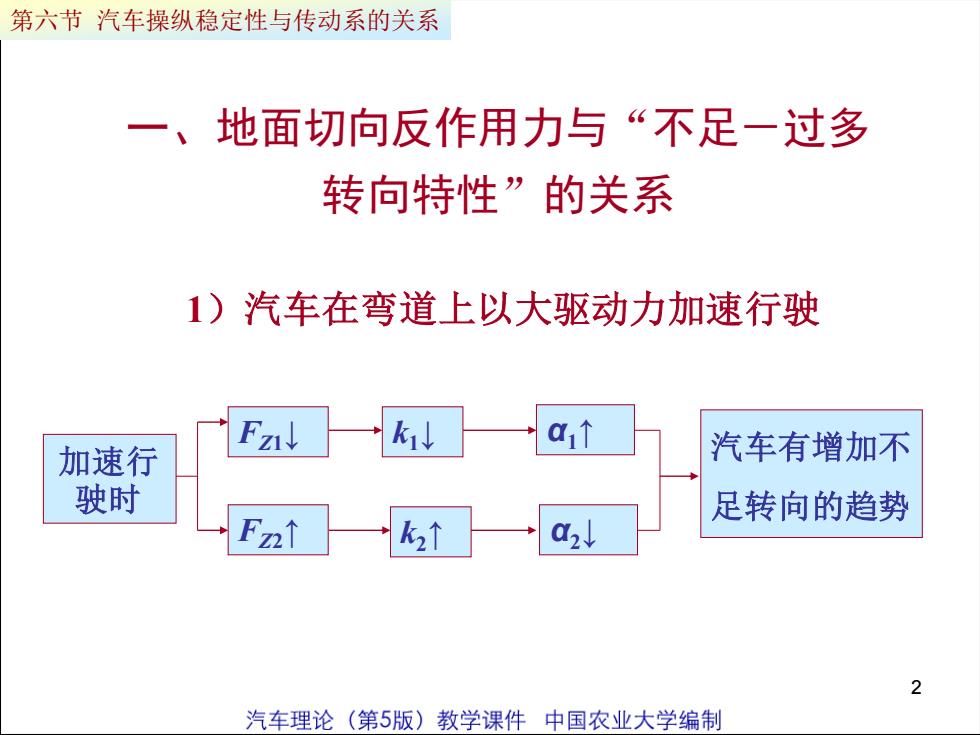
第六节汽车操纵稳定性与传动系的关系地面切向反作用力与“不足一过多转向特性”的关系1)汽车在弯道上以大驱动力加速行驶kilFzivai1汽车有增加不加速行驶时足转向的趋势Fz21k21a212汽车理论(第5版)教学课件中国农业大学编制
2 一、地面切向反作用力与“不足-过多 转向特性”的关系 1)汽车在弯道上以大驱动力加速行驶 第六节 汽车操纵稳定性与传动系的关系 FZ1↓ 汽车有增加不 足转向的趋势 加速行 驶时 k1↓ FZ2↑ k2↑ α2↓ α1↑
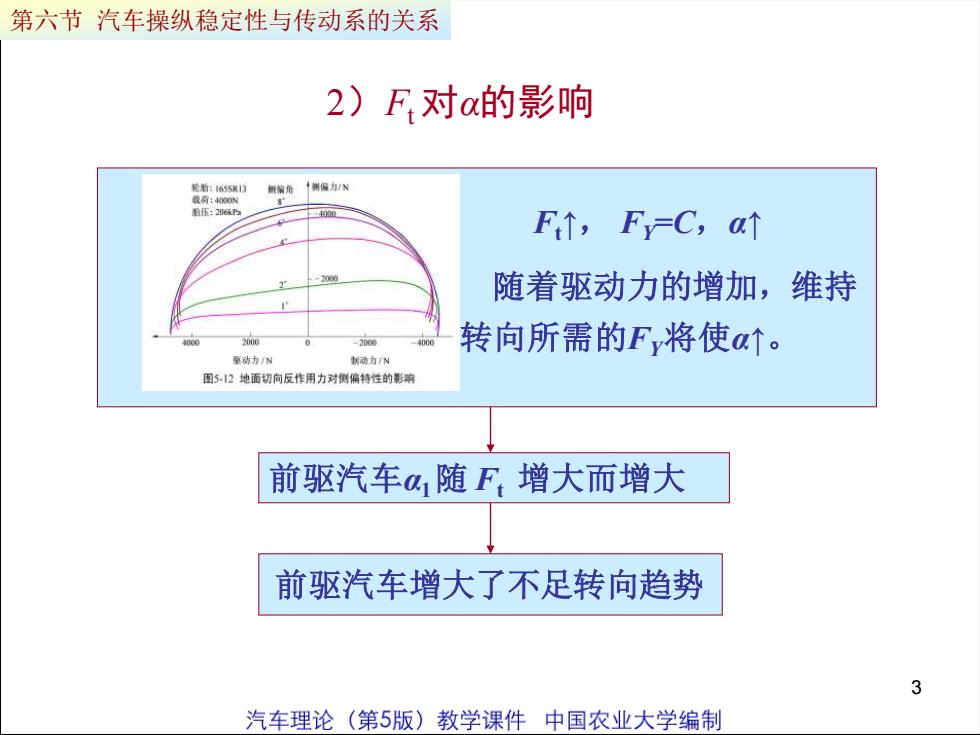
第六节汽车操纵稳定性与传动系的关系2)F对α的影响第偏力/教保Ft, Fy-C,α个随着驱动力的增加,维持转向所需的F将使α个。重动力/N能动力/图5-12地面切向反作用力对供偏特性的影响前驱汽车随F增大而增大前驱汽车增大了不足转向趋势3汽车理论(第5版)教学课件中国农业大学编制
3 前驱汽车增大了不足转向趋势 2)Ft 对α的影响 Ft↑, FY =C,α↑ 随着驱动力的增加,维持 转向所需的FY 将使α↑。 前驱汽车α1 随 Ft 增大而增大 第六节 汽车操纵稳定性与传动系的关系
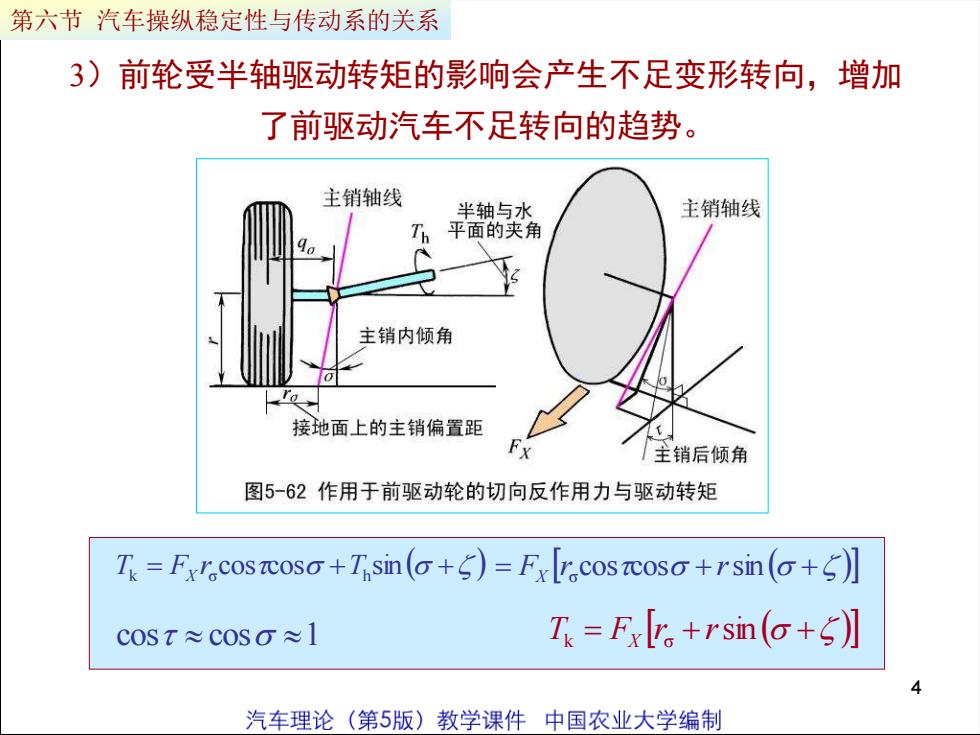
第六节汽车操纵稳定性与传动系的关系3)前轮受半轴驱动转矩的影响会产生不足变形转向,增加了前驱动汽车不足转向的趋势。主销轴线主销轴线半轴与水平面的夹角ThA主销内倾角o接地面上的主销偏置距Fx主销后倾角图5-62作用于前驱动轮的切向反作用力与驱动转矩T = Fxr.cos tcos + T,sin(α +) = Fx[r.cos tcoso + r sin (α +)T = Fx[r。 +rsin(o+)COST~COS~1汽车理论(第5版)教学课件中国农业大学编制
4 = coscos + sin ( + ) k σ Th T F r X = coscos + sin ( + ) σ F r r X cos cos 1 = + sin ( + ) k σ T F r r X 3)前轮受半轴驱动转矩的影响会产生不足变形转向,增加 了前驱动汽车不足转向的趋势。 第六节 汽车操纵稳定性与传动系的关系
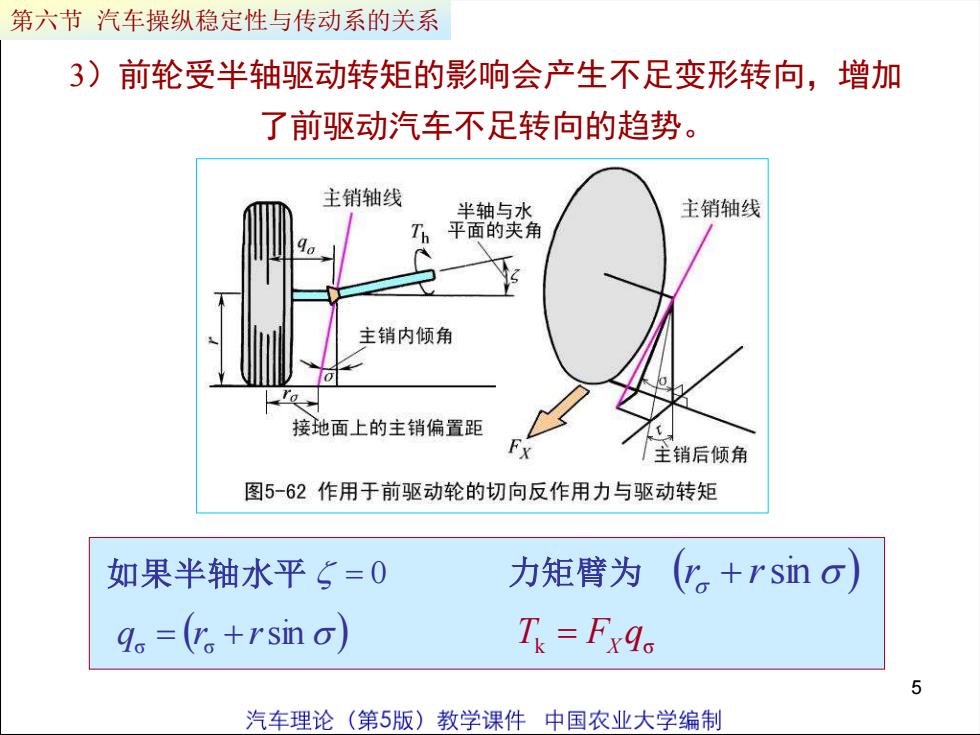
第六节汽车操纵稳定性与传动系的关系3)前轮受半轴驱动转矩的影响会产生不足变形转向,增加了前驱动汽车不足转向的趋势。主销轴线主销轴线半轴与水平面的夹角ThC主销内倾角Oro接地面上的主销偏置距tFx主销后倾角图5-62作用于前驱动轮的切向反作用力与驱动转矩力矩臂为(r。+rsin)如果半轴水平=0q。=(r +rsin o)T = Fxq.5汽车理论(第5版)教学课件中国农业大学编制
5 3)前轮受半轴驱动转矩的影响会产生不足变形转向,增加 了前驱动汽车不足转向的趋势。 如果半轴水平 = 0 力矩臂为 ( ) r + rsin ( sin ) σ σ q = r + r k σ T F q = X 第六节 汽车操纵稳定性与传动系的关系