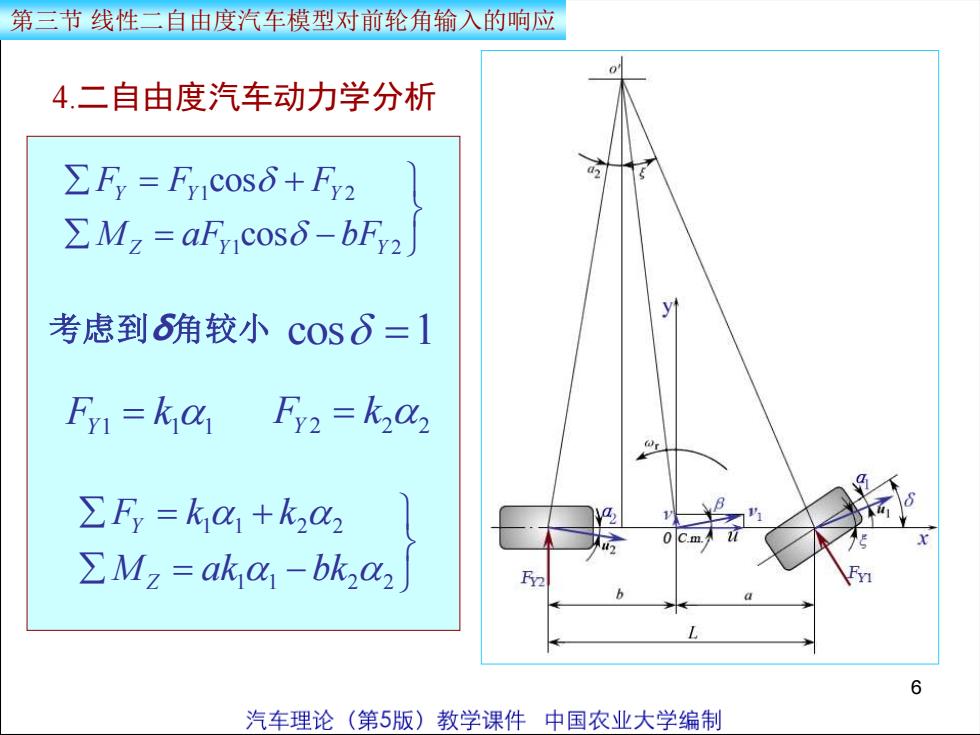
第三节线性二自由度汽车模型对前轮角输入的响应4.二自由度汽车动力学分析ZFy = FyicosS+Fy2ZMz =aFyicosS-bFy2考虑到8角较小 cos=1Fy=kαFy2=kzα2arEF = kai +kα2vaZMz =ak,αi-bk,α2FyFY6汽车理论(第5版)教学课件中国农业大学编制
6 = − = + 1 2 1 2 cos cos Z Y Y Y Y Y M aF bF F F F 考虑到δ角较小 cos =1 1 1 1 F k Y = 2 2 2 F k Y = = − = + 1 1 2 2 1 1 2 2 M ak bk F k k Z Y 4.二自由度汽车动力学分析 第三节 线性二自由度汽车模型对前轮角输入的响应
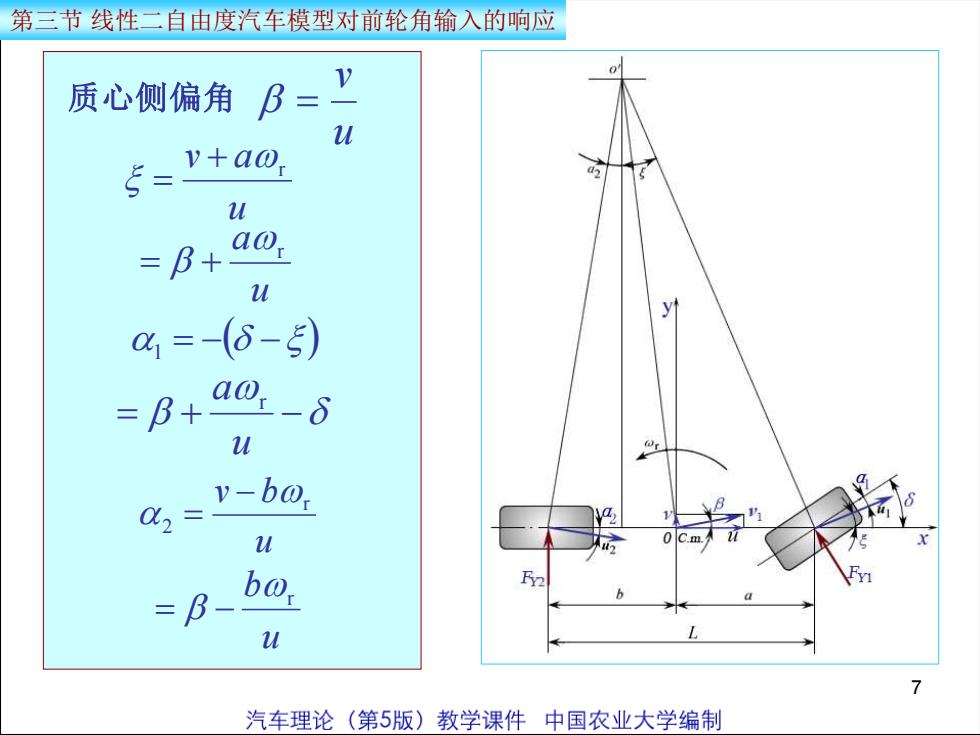
第三节线性二自由度汽车模型对前轮角输入的响应质心侧偏角βuv+ao,2uaor=β+uα =-(8-)aorEB7uv-bo,auFY2bor福u汽车理论(第5版)教学课件中国农业大学编制
7 质心侧偏角 u v = u v ar + = u ar = + = −( − ) 1 = + − u a r u v b r 2 − = u br = − 第三节 线性二自由度汽车模型对前轮角输入的响应
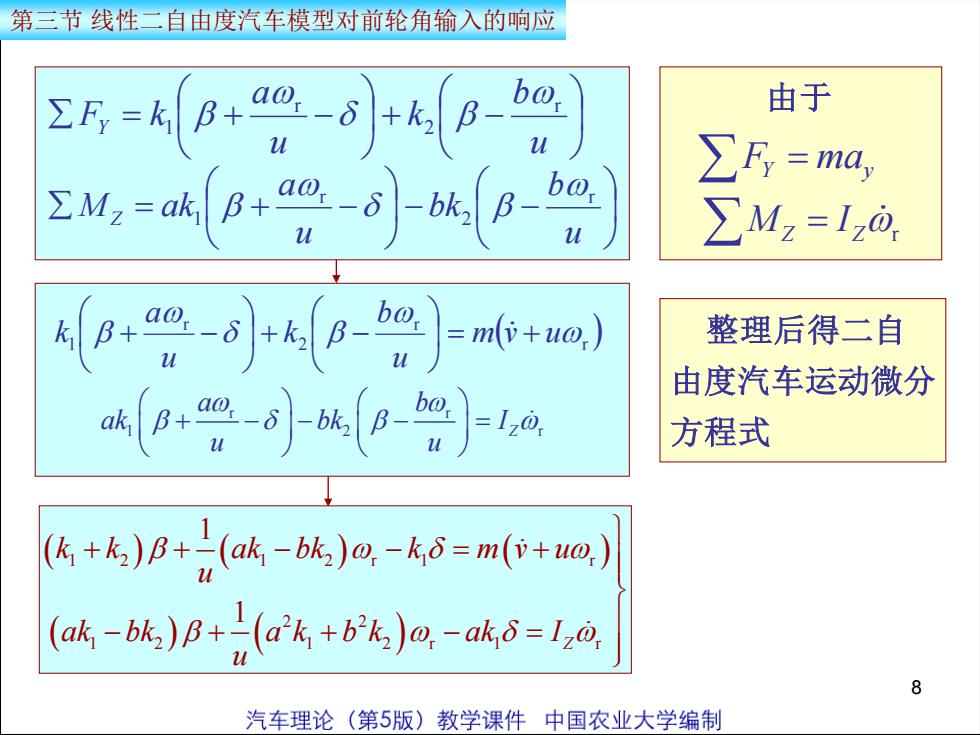
第三节线性二自由度汽车模型对前轮角输入的响应由于boZFy=klB+EF,=mayboaoZMz=ak31hkEMz =Izoruu整理后得二自m(i+uo)由度汽车运动微分boao=1,0ak方程式(k +k,)β+=(ak -bk.)o,-k,8=m(v+uo,(ak -bk,)β+-(a*k +b'k,)o, -ak8=I2o8汽车理论(第5版)教学课件中国农业大学编制
8 + − = + − u b k u a F k Y r 2 r 1 − − = + − u b bk u a M ak Z r 2 r 1 FY = may = r Z Z M I 由于 ( )r r 2 r 1 m v u u b k u a k = + + − + − r r 1 2 r Z a b ak bk I u u + − − − = ( ) ( ) ( ) ( ) ( ) 1 2 1 2 r 1 r 2 2 1 2 1 2 r 1 r 1 1 Z k k ak bk k m v u u ak bk a k b k ak I u + + − − = + − + + − = 整理后得二自 由度汽车运动微分 方程式 第三节 线性二自由度汽车模型对前轮角输入的响应
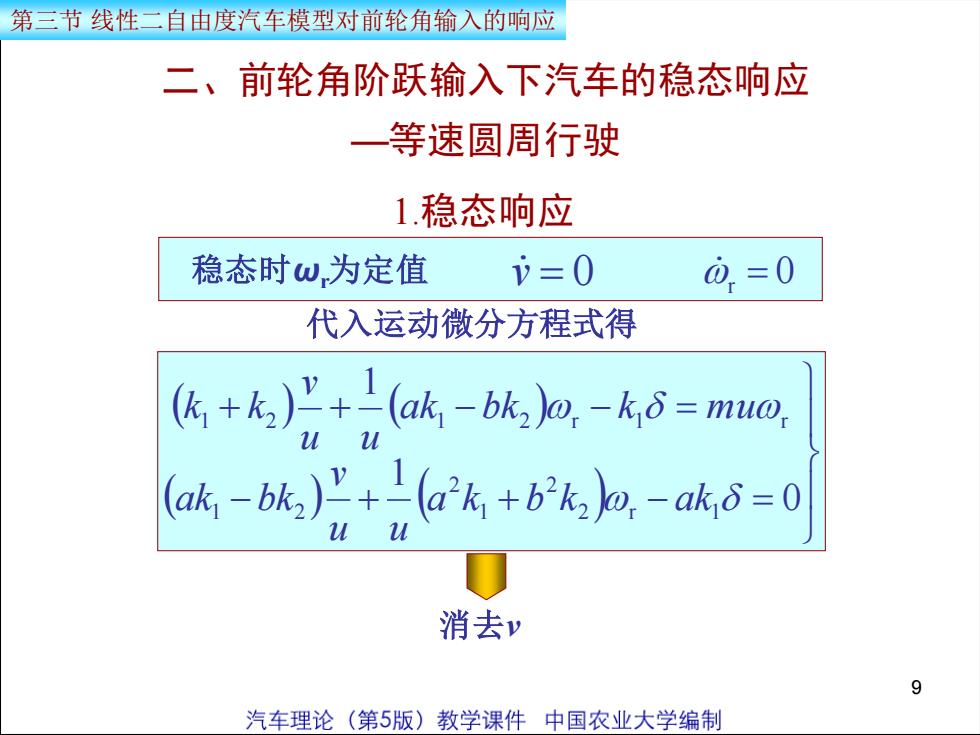
第三节线性二自由度汽车模型对前轮角输入的响应二、前轮角阶跃输入下汽车的稳态响应等速圆周行驶1.稳态响应稳态时w为定值v=00=0代入运动微分方程式得(k + k)~+-(ak -bk )o, -k,8= mu0,(ak -bk2)=+-(a2k +b’k2)o, -ak= 0消去9汽车理论(第5版)教学课件中国农业大学编制
9 v = 0 r = 0 代入运动微分方程式得 ( ) ( ) ( ) ( ) − + + − = + + − − = 0 1 1 2 r 1 2 1 2 1 2 1 2 1 2 r 1 r a k b k ak u u v ak bk ak bk k m u u u v k k 1.稳态响应 稳态时ωr为定值 消去v 第三节 线性二自由度汽车模型对前轮角输入的响应 二、前轮角阶跃输入下汽车的稳态响应 —等速圆周行驶
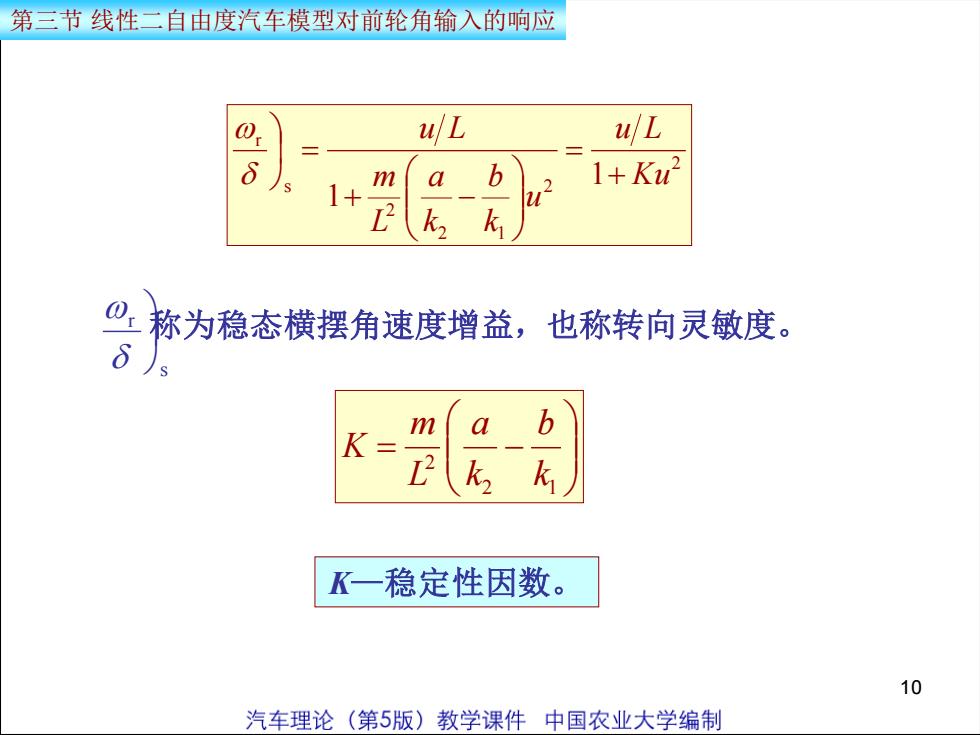
第三节线性二自由度汽车模型对前轮角输入的响应u/Lu/L0S1+ Ku?bm02uL2k,k称为稳态横摆角速度增益,也称转向灵敏度。8)sbmQkK一稳定性因数。10汽车理论(第5版)教学课件中国农业大学编制
10 s r 2 2 2 1 2 s r 1 1 Ku u L u k b k a L m u L + = + − = = − 2 1 2 k b k a L m K 称为稳态横摆角速度增益,也称转向灵敏度。 K—稳定性因数。 第三节 线性二自由度汽车模型对前轮角输入的响应