第七节 提高操纵稳定性的电子控制系统VSC(ESP)的作用抑制后轮侧滑无VSC有vSC6汽车理论(第5版)教学课件中国农业大学编制
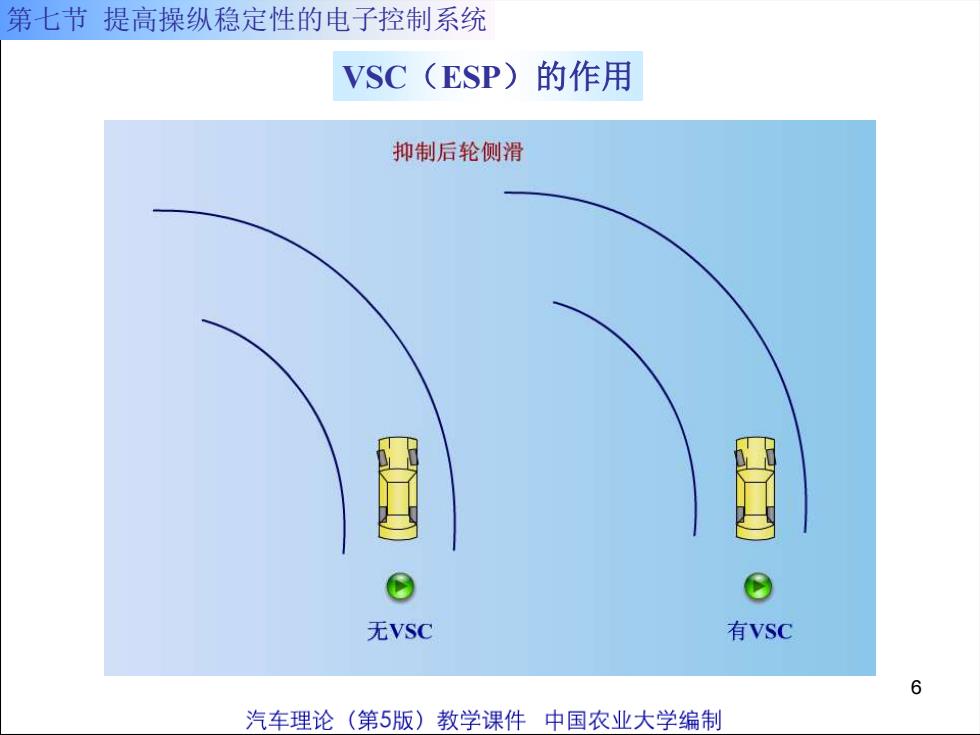
6 第七节 提高操纵稳定性的电子控制系统 VSC(ESP)的作用
第七节 提高操纵稳定性的电子控制系统VSC(ESP)的作用无VSC有VSC前轴侧滑出现“驶出”现象向内侧的减速横摆力偶矩加大内侧车轮的制动力抑制前轮侧滑1汽车理论(第5版)教学课件中国农业大学编制
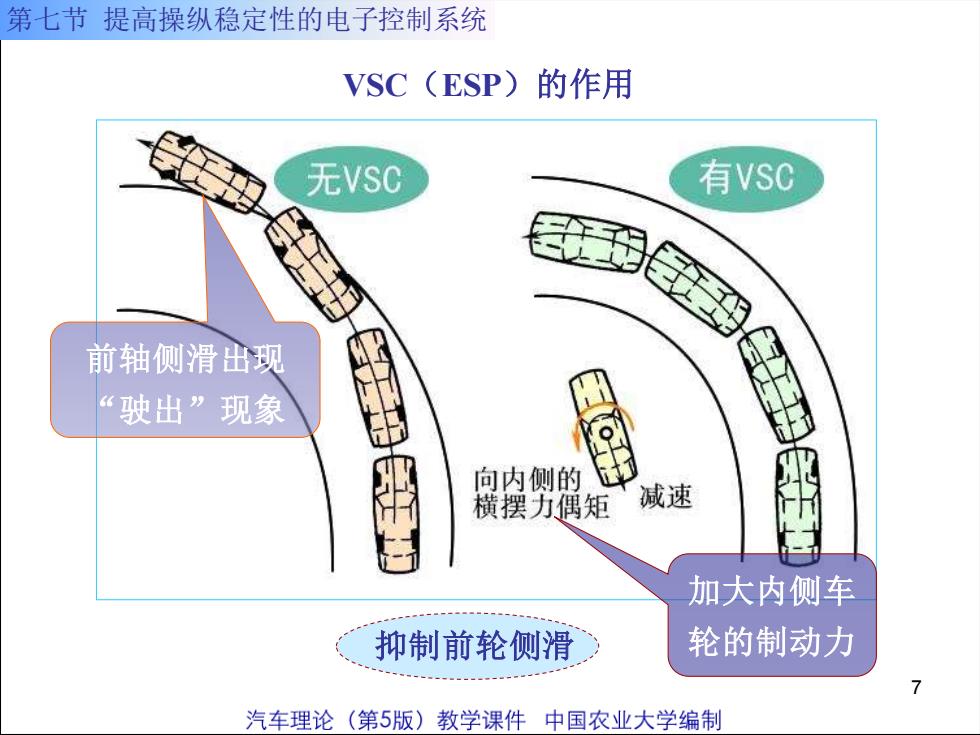
7 前轴侧滑出现 “驶出”现象 加大内侧车 轮的制动力 第七节 提高操纵稳定性的电子控制系统 VSC(ESP)的作用 抑制前轮侧滑

第七节 提高操纵稳定性的电子控制系统VSC(ESP)的作用无VSC有VSC向外侧的横摆力偶矩减速后轴侧滑出现甩尾现象加大外侧车轮的制动力抑制后轮侧滑8汽车理论(第5版)教学课件中国农业大学编制
8 后轴侧滑出 现甩尾现象 加大外侧车 轮的制动力 第七节 提高操纵稳定性的电子控制系统 抑制后轮侧滑 VSC(ESP)的作用
第七节提高操纵稳定性的电子控制系统提高操纵稳定性的各种电子控制系统的有效工作区域驱动驱动力侧倾刚度分配控制分配控制TCSS弯道行驶弯道行驶OSAOSR4WSRABS制动力*分配控制制动9汽车理论(第5版)教学课件中国农业大学编制
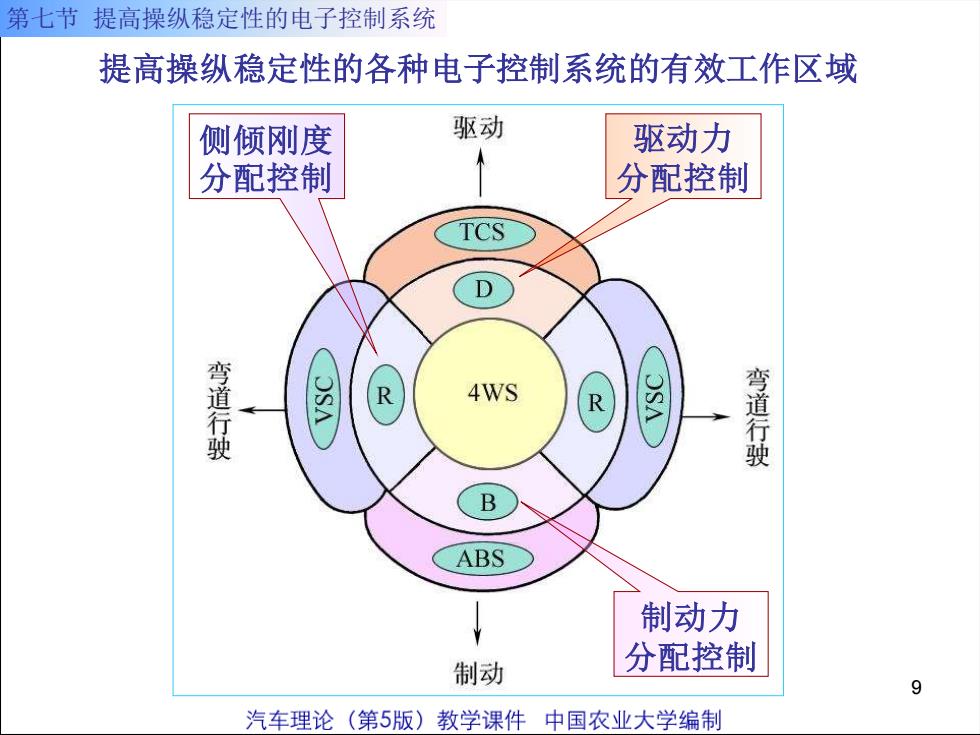
9 提高操纵稳定性的各种电子控制系统的有效工作区域 驱动力 分配控制 制动力 分配控制 侧倾刚度 分配控制 第七节 提高操纵稳定性的电子控制系统
第七节提高操纵稳定性的电子控制系统极限工况下前轴侧滑与后轴侧滑的特点起始车速120km/h、频率0.6Hz的转向角正弦输入下的响应1.50.21.0e/pe/0.502430.20.51.5个/e1.00.52340.5010汽车理论(第5版)教学课件中国农业大学编制
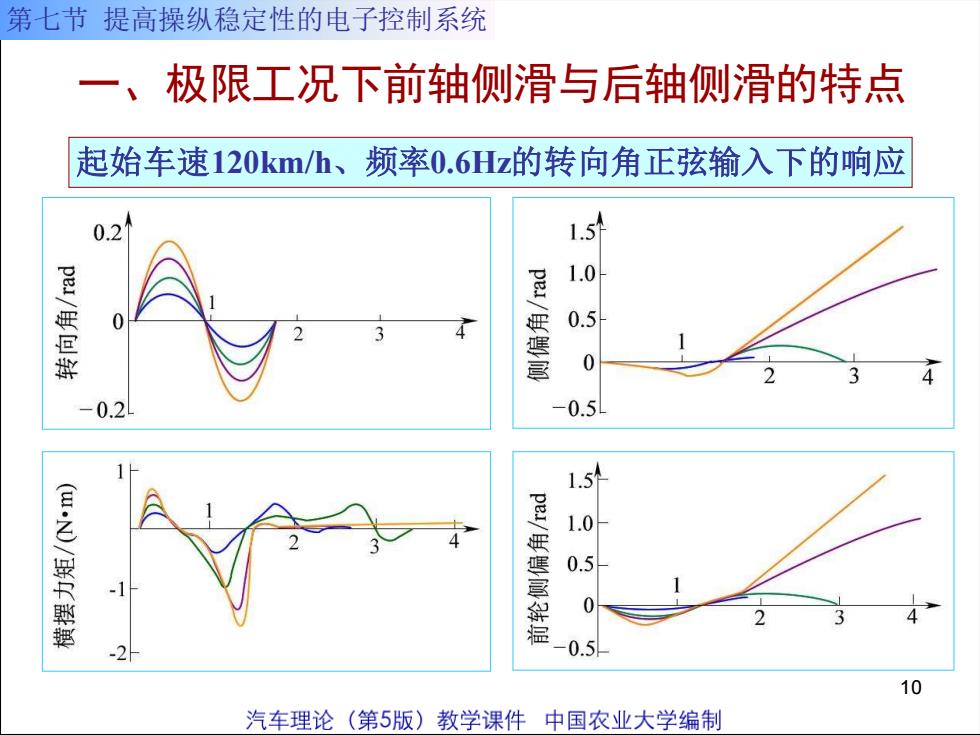
10 第七节 提高操纵稳定性的电子控制系统 起始车速120km/h、频率0.6Hz的转向角正弦输入下的响应 一、极限工况下前轴侧滑与后轴侧滑的特点