
故障(短路 分 第10章系统保护 障的类型和发 10.2过我保护 不对林故专 10:路 故险申流偏移系 保护 电流中 故障电流的大 电动机对故障 的电路保护 10.11 。9断路器选择的问 0.13状态监 第13章船舶工业 完成课程没计作业 3.1标准煎布机构 4 3.5 军用标准 MILITARY-STD-1399 三、教学方法 本课程的特点是理论与应用并重,将电气工程专业知识融入到船舶电力系统的实际应用 之中。其教学 方式应采用启发式,引导式教学,避免繁琐的理论推导和满堂灌方法, 结合应 用实例进行讲解,引导学生学会分析问题和解决问题。运用多媒体教学,并与板书相结合, 开设讨论课,激发学生学习兴趣。 课程资料上传至学校网络教学平台,包括文教学大纲、教学日历、电子课件等,帮助同 学课前预习和课下复习。 安排课下答疑时间,并利用现代网络通讯平台(E-mal、QQ、微信等)进行课下和在线 答疑,随时解答学生问题,加强和学生之间的交流、讨论。 此外,在教学中通过船舶的发展历史、习近平主席的讲话和名人轶事组织学生自主查阅 并进行课堂讨论,让学生准确地理解专业知识,激发探索和创新精神的同时进行职业道德教 有,使学生明确中国发展的使命与挑战,培养学生不断进取的精神。 四、考核与评价方式及标准 以下为参考 课程考核由平时成绩与期末考试成绩相结合的方式进行。 3.考试主要采用开卷方式,考试范围应涵盖所有讲授的内容,考试内容应能客观反映 出学生对本门课程主要概念的记忆、堂握程度,对有关理论的理解、掌握及综合运 用能力。 4.总评成绩:平时作业、课堂讨论和课堂表现占30%、开卷考试占70%
32 备 第 9 章 故障(短路) 电流分析 9.1 故障的类型和发 生频率 9.2 故障分析模型 9.3 不对称故障暂态 过程 9.4 故障电流偏移系 数 9.5 故障电流的大小 9.6 电动机对故障电 流的影响 9.7 限流电抗器 9.8 非对称故障 9.9 断路器选择的简 化 4 课后自习 第 10 章 系统保护 10.1 熔断器 10.2 过载保护 10.3 继电器 10.4 断路器 10.5 发电机的差动保护 10.6 母线和馈线的差动保护 10.7 对地故障电流中断器 10.8 变压器保护 10.9 电动机支路的电路保护 10.10 闪电和开关电压保护 10.11 小型敏感负荷的浪涌保护 10.12 保护电路的协调 10.13 状态监测 10.14 电弧分析 √ √ √ 第 13 章 船舶工业标 准 13.1 标准颁布机构 13.2 船级社 13.3IEEE STANDARD-45 标准 13.4 美国联邦法规 13.5 军 用 标 准 MILITARY-STD-1399 4 完成课程设计作业 √ √ √ √ √ √ 三、教学方法 本课程的特点是理论与应用并重,将电气工程专业知识融入到船舶电力系统的实际应用 之中。其教学方式应采用启发式,引导式教学,避免繁琐的理论推导和满堂灌方法,结合应 用实例进行讲解,引导学生学会分析问题和解决问题。运用多媒体教学,并与板书相结合, 开设讨论课,激发学生学习兴趣。 课程资料上传至学校网络教学平台,包括文教学大纲、教学日历、电子课件等,帮助同 学课前预习和课下复习。 安排课下答疑时间,并利用现代网络通讯平台(E-mail、QQ、微信等)进行课下和在线 答疑,随时解答学生问题,加强和学生之间的交流、讨论。 此外,在教学中通过船舶的发展历史、习近平主席的讲话和名人轶事组织学生自主查阅 并进行课堂讨论,让学生准确地理解专业知识,激发探索和创新精神的同时进行职业道德教 育,使学生明确中国发展的使命与挑战,培养学生不断进取的精神。 四、考核与评价方式及标准 以下为参考: 课程考核由平时成绩与期末考试成绩相结合的方式进行。 3. 考试主要采用开卷方式,考试范围应涵盖所有讲授的内容,考试内容应能客观反映 出学生对本门课程主要概念的记忆、掌握程度,对有关理论的理解、掌握及综合运 用能力。 4. 总评成绩:平时作业、课堂讨论和课堂表现占 30%、开卷考试占 70%
五、课程思政素材 对课程目标的支排度 序号课程思政素材 对应章节 教学方法 2.1 2.22.3242.52.6 1船的发展史 绪论 讲授、视频 步¥,海洋 2 洋推动洋 第1-3章 讲授、图片、讨论 得设不新取 远,海 2 近平主席提出 第4-8章 讲投、图片、讨论 但议5年 3 第9音 德教有 4 进程的 第” PPT讲授 5 积极学习的 视、讲授 备注:在教学过程中,根据时事变化和科技前沿等及时更新和丰富相关思政素材。 六、参考教材和阅读书目 参考敦材: MukundR.Patel若汤天浩,许晓彦,谢卫等译,《国际电气工程先进技术译丛:船舶电 力系统[Shipboard Electrical Power Systems》,机械工业出版社出版,2014年。 阅读书目: Mohammed M.Islam著,《Shipboard Power Systems Design and Verification Fundamentals》), Standards Information Network,2018年; 能灵主编,《大型船舶电力系统关键技术与应用》,科学出版社,2012年 庞科旺主编,《船舶电力系统设计》,机械工业出版社,2010年。 七、本课程与其他课程的联系 本课程的先修课程为大学英语、电工技术基础、电机与拖动基础、电力系统基础等。 撰人:邢博闻 审核人:周悦霍海波 教学院长:郑兴伟 日期:2019年1月3日
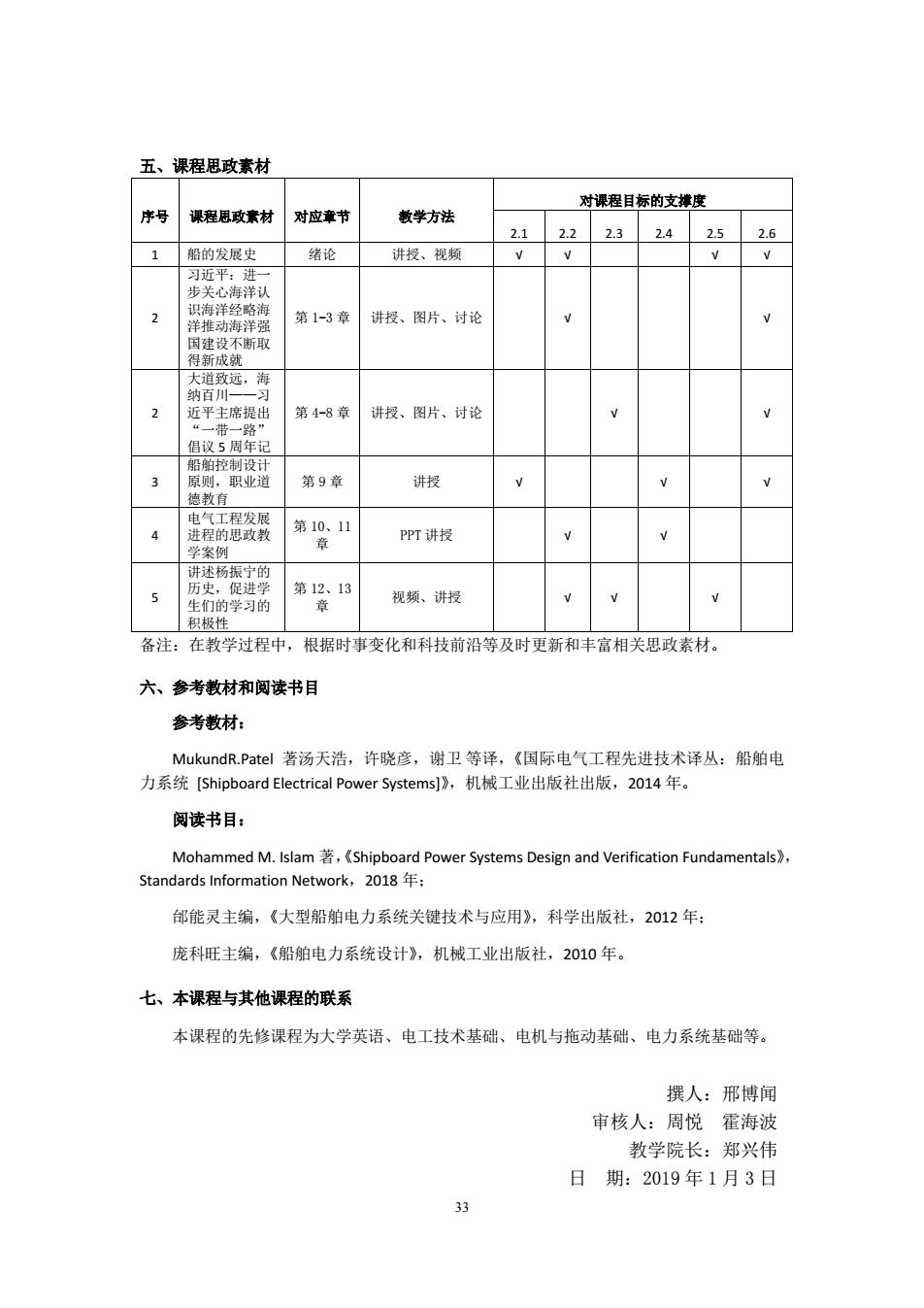
33 五、课程思政素材 序号 课程思政素材 对应章节 教学方法 对课程目标的支撑度 2.1 2.2 2.3 2.4 2.5 2.6 1 船的发展史 绪论 讲授、视频 √ √ √ √ 2 习近平:进一 步关心海洋认 识海洋经略海 洋推动海洋强 国建设不断取 得新成就 第 1-3 章 讲授、图片、讨论 √ √ 2 大道致远,海 纳百川——习 近平主席提出 “一带一路” 倡议 5 周年记 第 4-8 章 讲授、图片、讨论 √ √ 3 船舶控制设计 原则,职业道 德教育 第 9 章 讲授 √ √ √ 4 电气工程发展 进程的思政教 学案例 第 10、11 章 PPT 讲授 √ √ 5 讲述杨振宁的 历史,促进学 生们的学习的 积极性 第 12、13 章 视频、讲授 √ √ √ 备注:在教学过程中,根据时事变化和科技前沿等及时更新和丰富相关思政素材。 六、参考教材和阅读书目 参考教材: MukundR.Patel 著汤天浩,许晓彦,谢卫 等译,《国际电气工程先进技术译丛:船舶电 力系统 [Shipboard Electrical Power Systems]》,机械工业出版社出版,2014 年。 阅读书目: Mohammed M. Islam 著,《Shipboard Power Systems Design and Verification Fundamentals》, Standards Information Network,2018 年; 邰能灵主编,《大型船舶电力系统关键技术与应用》,科学出版社,2012 年; 庞科旺主编,《船舶电力系统设计》,机械工业出版社,2010 年。 七、本课程与其他课程的联系 本课程的先修课程为大学英语、电工技术基础、电机与拖动基础、电力系统基础等。 撰人:邢博闻 审核人:周悦 霍海波 教学院长:郑兴伟 日 期:2019 年 1 月 3 日

《无人水面航行器技术概论》教学大纲 课程名称(中文/英文):无人水面航行器技术概论(Surface Vehide) 课程编号:4604041 学分:1 学时:总学时16 学时分配:讲授学时:12实验学时:4上机学时:0讨论学时:0其他学时:0 课程负责人:邢博闻 一、课程简介 1.课程概况 无人船己经广泛应用于海洋环境保护和海洋资源开发等领域,通过搭载不同的传感器可 以实现各种不同的海洋作业任务,如海洋资源勘探、海洋环境监测、海洋灾难预警、海洋或 其他水域水文监测等。为了进一步开发和设计应用于海洋科学研究的无人船平台,让同学们 更加了解无人船的战略意义,主要通过无人船的总体系统控制来讲述,主要涉及GS技术、 MCU技术、远程通信技术等。 Nowadays,Unmanned Surface Vehicles are widely used in the fields of Marine environmental protection and Marine resources development.By carrying different sensors, various kinds of ocean operations can be carried out by USV,such as Marine resources exploration,Marine environment monitoring,Marine disaster warning,Marine or other hydrological monitoring. In order to further develop and design the USV applied in Marine science research,students can have a better understanding of the strategic significance of unmanned shipwhich is mainly described through the overall system control of unmanned ship,mainly involving GPS technology, MCU technology,remote communication technology and so on. 2.课程目标 21课程目标1:了解无人船发展的历程,了解无人船的发展意义及无人船的基本结构 构 2.2课程目标2:掌捏无人船的运动控制装置的制作原理: 2.3课程目标3:了解无人船的通讯方式、操控软件的设计方法: 2.4课程目标4:培有学生海洋意识,增强学生对国家海洋强国战略与一带一路倡议的 认知与了解,培养学生人与自然环境和谐共生意识,明确人类共同发展进步的历史担当
34 《无人水面航行器技术概论》教学大纲 课程名称(中文/英文):无人水面航行器技术概论(Introduction to Unmanned Surface Vehicle) 课程编号:4604041 学 分:1 学 时:总学时 16 学时分配:讲授学时:12 实验学时:4 上机学时:0 讨论学时:0 其他学时:0 课程负责人:邢博闻 一、课程简介 1. 课程概况 无人船已经广泛应用于海洋环境保护和海洋资源开发等领域,通过搭载不同的传感器可 以实现各种不同的海洋作业任务,如海洋资源勘探、海洋环境监测、海洋灾难预警、海洋或 其他水域水文监测等。为了进一步开发和设计应用于海洋科学研究的无人船平台,让同学们 更加了解无人船的战略意义,主要通过无人船的总体系统控制来讲述,主要涉及 GPS 技术、 MCU 技术、远程通信技术等。 Nowadays, Unmanned Surface Vehicles are widely used in the fields of Marine environmental protection and Marine resources development. By carrying different sensors, various kinds of ocean operations can be carried out by USV, such as Marine resources exploration, Marine environment monitoring, Marine disaster warning, Marine or other hydrological monitoring. In order to further develop and design the USV applied in Marine science research, students can have a better understanding of the strategic significance of unmanned shipwhich is mainly described through the overall system control of unmanned ship, mainly involving GPS technology, MCU technology,remote communication technology and so on. 2. 课程目标 2.1 课程目标 1:了解无人船发展的历程,了解无人船的发展意义及无人船的基本结构 构造; 2.2 课程目标 2:掌握无人船的运动控制装置的制作原理; 2.3 课程目标 3:了解无人船的通讯方式、操控软件的设计方法; 2.4 课程目标 4:培育学生海洋意识,增强学生对国家海洋强国战略与一带一路倡议的 认知与了解,培养学生人与自然环境和谐共生意识,明确人类共同发展进步的历史担当

二、教学内容 理论教学安排 教学内容 学时 备注 对课程且标的支排度 212.22.32.4 国内外现 系统功能需求分析 2 V V 无线通讯功能的实现 运动控制功能 控今的解析和控制命令省出 VV 演示实验 VV V 三、教学方法 本课程的特点是理论与应用并重,其教学方式应采用启发式,引导式教学,避免繁琐的 理论推导和满堂灌方法,结合应用实例进行讲解,引导学生学会分析问题和解决问题。运用 多媒体教学,并与板书相结合,开设讨论课,激发学生学习兴趣。 课程资料上传至学校网络教学平台,包括文教学大纲、教学日历、电子课件等,帮助同 学课前预习和课下复习。 安排课下答疑时间,并利用现代网络通讯平台(E-ma、QQ、微信等)进行课下和在线 答疑,随时解答学生问题,加强和学生之间的交流、讨论。 此外,在教学中通过习近平主席的讲话、中国芯的反思和科学家朱英富的事迹,学生自 主查阅并进行课堂讨论,让学生准确地理解专业知识,激发探索和创新精神的同时进行职业 道德教育,使学生明确中国发展的使命与挑战,培养学生不断进取的精神。 四、考核与评价方式及标准 课程考核由平时成绩与期末考试成绩相结合的方式进行 5.考试主要采用提交报告的方式,考试范围应涵盖所有讲授及自学的内容,考试内容 应能客观反映出学生对本门课程主要概念的记忆、掌握程度,对有关理论的理解、 掌握及综合运用能力。 6.总评成绩:平时作业、课堂讨论和课堂表现占30%、提交报告占70% 五、课程思政素材 对课程目标的支排度 序号 课程思政素材 对应章节 教学方法 2.1 2.223 2.4 绪谄 讲授、图片、讨论 致i 2 一 第2 讲授、图片、讨论 但 5周年 3 现状引起我们的反第3、4章 讲授、祝频 35
35 二、教学内容 理论教学安排 教学内容 学时 备注 对课程目标的支撑度 2.1 2.2 2.3 2.4 国内外现状 2 √ √ 系统功能需求分析 2 √ √ 无线通讯功能的实现 2 √ √ 运动控制功能 2 √ √ 船体系统的搭建 2 √ √ √ √ 控制命令的解析和控制命令输出 2 √ √ 演示实验 4 √ √ √ 三、教学方法 本课程的特点是理论与应用并重,其教学方式应采用启发式,引导式教学,避免繁琐的 理论推导和满堂灌方法,结合应用实例进行讲解,引导学生学会分析问题和解决问题。运用 多媒体教学,并与板书相结合,开设讨论课,激发学生学习兴趣。 课程资料上传至学校网络教学平台,包括文教学大纲、教学日历、电子课件等,帮助同 学课前预习和课下复习。 安排课下答疑时间,并利用现代网络通讯平台(E-mail、QQ、微信等)进行课下和在线 答疑,随时解答学生问题,加强和学生之间的交流、讨论。 此外,在教学中通过习近平主席的讲话、中国芯的反思和科学家朱英富的事迹,学生自 主查阅并进行课堂讨论,让学生准确地理解专业知识,激发探索和创新精神的同时进行职业 道德教育,使学生明确中国发展的使命与挑战,培养学生不断进取的精神。 四、考核与评价方式及标准 课程考核由平时成绩与期末考试成绩相结合的方式进行。 5. 考试主要采用提交报告的方式,考试范围应涵盖所有讲授及自学的内容,考试内容 应能客观反映出学生对本门课程主要概念的记忆、掌握程度,对有关理论的理解、 掌握及综合运用能力。 6. 总评成绩:平时作业、课堂讨论和课堂表现占 30%、提交报告占 70%。 五、课程思政素材 序号 课程思政素材 对应章节 教学方法 对课程目标的支撑度 2.1 2.2 2.3 2.4 1 习近平:进一步关心海洋认 识海洋经略海洋推动海洋 强国建设不断取得新成就 绪论 讲授、图片、讨论 √ 2 大道致远,海纳百川——习 近平主席提出“一带一路” 倡议 5 周年记 第 2 章 讲授、图片、讨论 √ √ 3 中国芯现状引起我们的反 思 第 3、4 章 讲授、视频 √ √

讲还我国科学家朱英富 4 从而培养 第5、6章 讲投、祝频 学思维习惯。 备注:在教学过程中,根据时事变化和科技前沿等及时更新和丰富相关思政素材。 六、参考教材和阅读书目 参考散材: 自编讲义《无人水面航行器技术概论》 阅读书目: WANG Ying-zhi,TONG Yi-chengYANGJia.Design of Control Terminal for Water Quality Detection Based on the Beidou Satellite Navigation System[].Applied Mechanics&Materials, 2015.(733:666-669. Deze Zeng,Shiyan Zhang,Lin Gu,etc.Quality-of-sensing aware budget constrained contaminant detection sensor deployment in water distribution system.Journal of Network and Computer Applications,Volume103,201,Pages 274-279 Mompoloki Pule,AbidYahya,Joseph Chur ma.Wireles netw uality.Joural of A ch and Tec vey on chnology,Volume 15, ,2017 H.Che,S.Liu Contaminant DetectionUsing Multiple Conventiona Water Quality Sensors in an Early Warning System.Procedia Engineering.Volume 89.2014,Pages 479-487 NuritOliker,AviOstfeld.Network hydraulics inclusion in water quality event detection using multiple sensor stations data.Water Research.Volume 80.2015,Pages 47-58. 七、本课程与其他课程的联系 本课程属于面向全校开课的通识教育选修课,开课目的是为学生提高海洋意识、培养创 新创业手段与方法,课程设计较为独立。 八、其他 主撰人:邢博闻 审核人:周悦霍海波 教学院长:郑兴伟 日期:2019年1月3日
36 4 讲述我国科学家朱英富 在船艇设计中的贡献及治 学风范,世界关注的辽宁舰 航母的事迹,从而培养科 学思维习惯。 第 5、6 章 讲授、视频 √ √ √ 备注:在教学过程中,根据时事变化和科技前沿等及时更新和丰富相关思政素材。 六、参考教材和阅读书目 参考教材: 自编讲义《无人水面航行器技术概论》 阅读书目: WANG Ying-zhi, TONG Yi-chengYANGJia. Design of Control Terminal for Water Quality Detection Based on the Beidou Satellite Navigation System[J].Applied Mechanics & Materials, 2015, (733): 666-669. Deze Zeng, Shiyan Zhang, Lin Gu, etc. Quality-of-sensing aware budget constrained contaminant detection sensor deployment in water distribution system, Journal of Network and Computer Applications, Volume 103, 2018, Pages 274-279. Mompoloki Pule, AbidYahya, Joseph Chuma. Wireless sensor networks: A survey on monitoring water quality. Journal of Applied Research and Technology, Volume 15, Issue 6, 2017, Pages 562-570. H. Che, S. Liu. Contaminant Detection Using Multiple Conventional Water Quality Sensors in an Early Warning System. Procedia Engineering. Volume 89. 2014, Pages 479-487. NuritOliker, AviOstfeld. Network hydraulics inclusion in water quality event detection using multiple sensor stations data. Water Research.Volume 80. 2015, Pages 47-58. 七、本课程与其他课程的联系 本课程属于面向全校开课的通识教育选修课,开课目的是为学生提高海洋意识、培养创 新创业手段与方法,课程设计较为独立。 八、其他 无 主撰人:邢博闻 审核人:周悦 霍海波 教学院长:郑兴伟 日 期:2019 年 1 月 3 日