3.频域性能指标和伯德图 山东理子大军 口在伯德图中,衡量最小相位系统稳定裕度的指标是:相角裕度γ和 以分贝表示的增益裕度GM。 一般要求y=30°60°,GM>6dB。 口保留适当的稳定裕度是为了在参数发生变化时不致造成系统不稳 定,稳定裕度同时也反映系统动态过程的平稳性,稳定裕度大就 意味着振荡弱、超调小。 电气与电子工程学院自动化系
电电气气与与电电子子工工程程学院学自院动自化动系化系 3.频域性能指标和伯德图 q 在伯德图中,衡量最小相位系统稳定裕度的指标是: 相角裕度 γ 和 以分贝表示的增益裕度GM。 q 一般要求γ =30°~60° ,GM >6dB。 q 保留适当的稳定裕度是为了在参数发生变化时不致造成系统不稳 定,稳定裕度同时也反映系统动态过程的平稳性,稳定裕度大就 意味着振荡弱、超调小
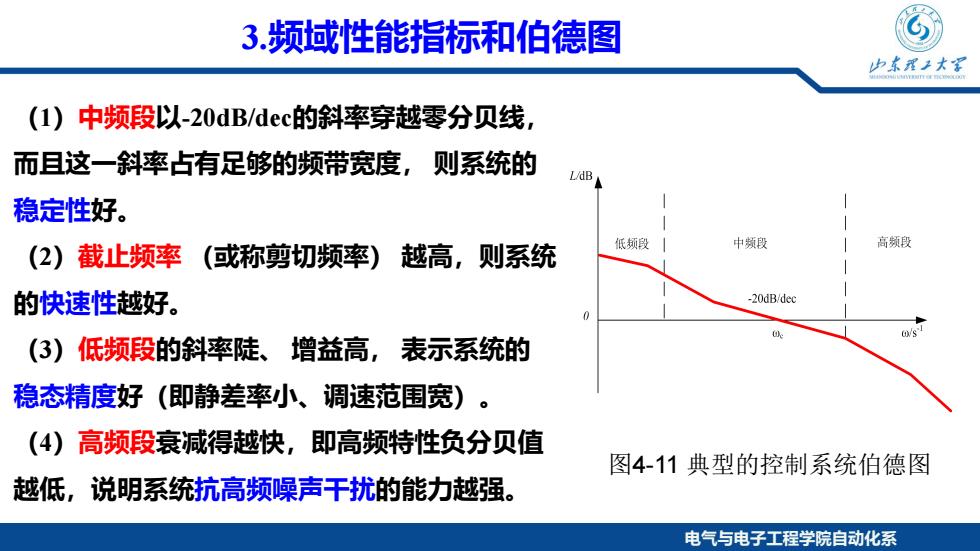
3.频域性能指标和伯德图 少东我子大军 (1)中频段以-20dB/dec的斜率穿越零分贝线, 而且这一斜率占有足够的频带宽度,则系统的 L/dB 稳定性好。 高频段 (2)截止频率 (或称剪切频率)越高,则系统 低频段 中频段 的快速性越好。 -20dB/dec (3)低频段的斜率陡、增益高,表示系统的 稳态精度好(即静差率小、调速范围宽)。 (4)高频段衰减得越快,即高频特性负分贝值 图4-11典型的控制系统伯德图 越低,说明系统抗高频噪声干扰的能力越强。 电气与电子工程学院自动化系
电电气气与与电电子子工工程程学院学自院动自化动系化系 3.频域性能指标和伯德图 (1)中频段以-20dB/dec的斜率穿越零分贝线, 而且这一斜率占有足够的频带宽度, 则系统的 稳定性好。 (2)截止频率 (或称剪切频率) 越高,则系统 的快速性越好。 (3)低频段的斜率陡、 增益高, 表示系统的 稳态精度好(即静差率小、调速范围宽)。 (4)高频段衰减得越快,即高频特性负分贝值 越低,说明系统抗高频噪声干扰的能力越强。 图4-11 典型的控制系统伯德图
内容提要 山东程子大军 4.3转速、电流双闭环控制直流调速系统的设计 4.31控制系统的动态性能指标 4.3.2调节器的工程设计方法 4.3.3控制对象的工程近以处理方法 4.3.4按工程设计方法设计转速、电流双闭环控制直流调速 系统的调节器 电气与电子工程学院自动化系
电电气气与与电电子子工工程程学院学自院动自化动系化系 内容提要 4.3 转速、电流双闭环控制直流调速系统的设计 4.3.1 控制系统的动态性能指标 4.3.2 调节器的工程设计方法 4.3.3 控制对象的工程近似处理方法 4.3.4 按工程设计方法设计转速、电流双闭环控制直流调速 系统的调节器
本节主要内容 少东程子大军 4.3.2调节器的工程设计方法 问题的提出 1.工程设计方法的原则和基本思路 口2.典型系统 口3.典型型系统性能指标与参数的关系 口4.典型Ⅲ型系统性能指标与参数的关系 电气与电子工程学院自动化系
电电气气与与电电子子工工程程学院学自院动自化动系化系 本节主要内容 4.3.2 调节器的工程设计方法 q 问题的提出 q 1. 工程设计方法的原则和基本思路 q 2. 典型系统 q 3. 典型I型系统性能指标与参数的关系 q 4. 典型II型系统性能指标与参数的关系
问题的提出 山东理子大军 口} 用经典的动态校正方法设计调节器须同时解决稳、准、快、 抗干扰等各方面相互有矛盾的静、动态性能要求, 需要设计者有扎实的理论基础和丰富的实践经验,而初学者 则不易掌握,于是有必要建立实用的设计方法。 电气与电子工程学院自动化系
电电气气与与电电子子工工程程学院学自院动自化动系化系 问题的提出 q 用经典的动态校正方法设计调节器须同时解决稳、准、快、 抗干扰等各方面相互有矛盾的静、动态性能要求, q 需要设计者有扎实的理论基础和丰富的实践经验,而初学者 则不易掌握,于是有必要建立实用的设计方法