
目录 少求程上大家 第4章转速、电流双闭环控制的直流调速系统 4.1转速、电流双闭环控制直流调速系统的组成及其静特性 4.2转速、电流双闭环控制直流调速系统的数学模型与动态过程分析 4.3转速、电流双闭环控制直流调速系统的设计 4.4双闭环直流调速系统的弱磁控制 4.5转速、电流双闭环控制直流调速系统的仿真 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 目录 第4章 转速、电流双闭环控制的直流调速系统 4.1 转速、电流双闭环控制直流调速系统的组成及其静特性 4.2 转速、电流双闭环控制直流调速系统的数学模型与动态过程分析 4.3 转速、电流双闭环控制直流调速系统的设计 4.4 双闭环直流调速系统的弱磁控制 4.5 转速、电流双闭环控制直流调速系统的仿真
内容提要 G 山东理子大军 4.1转速、电流双闭环控制直流调速系统的组成及其静特性 4.1.1转速、电流双闭环控制直流调速系统的组成 4.1.2稳态结构图与参数计算 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 内容提要 4.1 转速、电流双闭环控制直流调速系统的组成及其静特性 4.1.1 转速、电流双闭环控制直流调速系统的组成 4.1.2 稳态结构图与参数计算
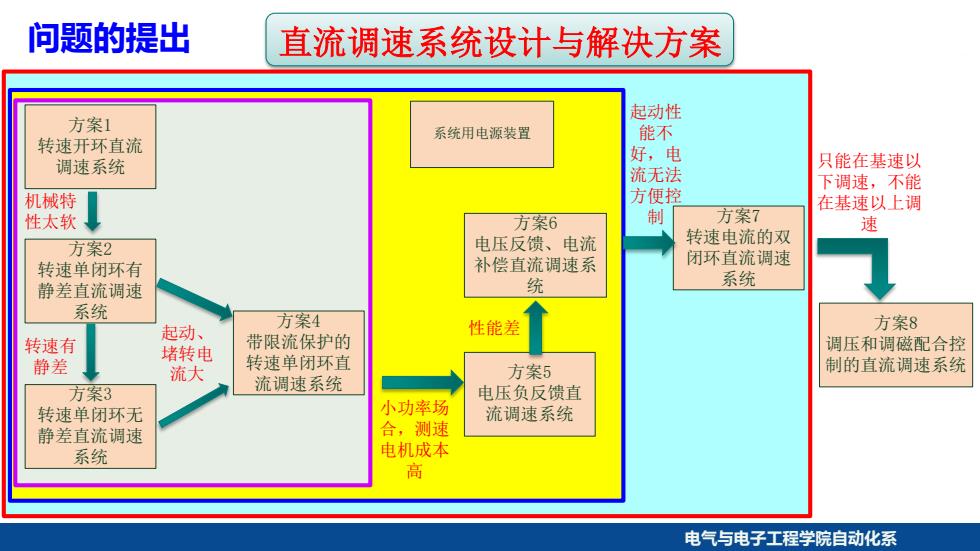
问题的提出 直流调速系统设计与解决方案 起动性 方案1 系统用电源装置 能不 转速开环直流 好,电 调速系统 只能在基速以 流无法 下调速,不能 机械特 方便控 在基速以上调 性太软 方案6 制 方案7 速 电压反馈、电流 转速电流的双 方案2 补偿直流调速系 闭环直流调速 转速单闭环有 静差直流调速 统 系统 系统 方案4 性能差 方案8 转速有 起动、 带限流保护的 堵转电 调压和调磁配合控 静差 流大 转速单闭环直 方案5 制的直流调速系统 方案3 流调速系统 电压负反馈直 转速单闭环无 小功率场 流调速系统 静差直流调速 合,测速 系统 电机成本 高 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 方案1 转速开环直流 调速系统 机械特 性太软 方案2 转速单闭环有 静差直流调速 系统 转速有 静差 方案3 转速单闭环无 静差直流调速 系统 方案4 带限流保护的 转速单闭环直 流调速系统 系统用电源装置 小功率场 合,测速 电机成本 高 方案5 电压负反馈直 流调速系统 方案6 电压反馈、电流 补偿直流调速系 统 性能差 起动性 能不 好,电 流无法 方便控 制 方案7 转速电流的双 闭环直流调速 系统 只能在基速以 下调速,不能 在基速以上调 速 方案8 调压和调磁配合控 制的直流调速系统 直流调速系统设计与解决方案 起动、 堵转电 流大 问题的提出
问题的提出 山东理子大军 ▣ 第3章中表明,采用转速负反馈和P调节器的单闭环直流调 速系统可以在保证系统稳定的前提下实现转速无静差。 动态性能要求:对于龙门刨床、可逆轧钢机等经常正、反转 运行的调速系统,缩短起、制动过程的时间是提高生产率的 重要因素。 ▣ 如果对系统的动态性能要求较高,例如:要求快速起制动, 突加负载动态速降小等等,单闭环系统就难以满足需要。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 问题的提出 第3章中表明,采用转速负反馈和PI调节器的单闭环直流调 速系统可以在保证系统稳定的前提下实现转速无静差。 动态性能要求:对于龙门刨床、可逆轧钢机等经常正、反转 运行的调速系统,缩短起、制动过程的时间是提高生产率的 重要因素。 如果对系统的动态性能要求较高,例如:要求快速起制动, 突加负载动态速降小等等,单闭环系统就难以满足需要
(1)主要原因 山东我上大军 如何控制动态性能? 口电力拖动系统的运动方程: GD'dn →14-1= GD' dn T。-T= 375dt 375C dt 口结论:要得到好的动态性能,必须控制好转矩, 即控 制好电流。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 (1)主要原因 如何控制动态性能? 电力拖动系统的运动方程: 结论:要得到好的动态性能,必须控制好转矩,即控 制好电流。 dt GD dn Te TL 375 2 − = dt dn C GD I I m d L 375 2 − =