本章目录 少求理子大军 第7章基于动态模型的异步电动机调速系统 7.1异步电动机动态数学模型的性质 7.2异步电动机的三相数学模型 7.3坐标变换 7.4异步电动机在正交坐标系上的动态数学模型 7.5异步电动机在正交坐标系上的状态方程 7.6异步电动机按转子磁链定向的矢量控制系统 7.7异步电动机按定子磁链控制的直接转矩控制系统 78直接转矩控制系统与矢量控制系统的比较 电气与电子工程学院自动化系
电气与电子工程学院自动化系 本章目录 第7章 基于动态模型的异步电动机调速系统 7.1 异步电动机动态数学模型的性质 7.2 异步电动机的三相数学模型 7.3 坐标变换 7.4 异步电动机在正交坐标系上的动态数学模型 7.5 异步电动机在正交坐标系上的状态方程 7.6 异步电动机按转子磁链定向的矢量控制系统 7.7 异步电动机按定子磁链控制的直接转矩控制系统 7.8 直接转矩控制系统与矢量控制系统的比较
7.3坐标变换 山东理子大 口上节中虽已推导出异步电机的动态数学模型,但是,要分析和求解这 组非线性方程显然是十分困难的。 口异步电动机数学模型之所以复杂,关键是因为有一个复杂的6×6电感 矩阵,它体现了异步电动机的电磁耦合和能量转换的复杂关系。 口因此,要简化数学模型,须从简化磁链关系入手。借助坐标变换对数 学模型进行简化以便进行控制。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 7.3 坐标变换 上节中虽已推导出异步电机的动态数学模型,但是,要分析和求解这 组非线性方程显然是十分困难的。 异步电动机数学模型之所以复杂,关键是因为有一个复杂的 6×6 电感 矩阵,它体现了异步电动机的电磁耦合和能量转换的复杂关系。 因此,要简化数学模型,须从简化磁链关系入手。借助坐标变换对数 学模型进行简化以便进行控制
7.3.1坐标变换的基本思路 山求程子大军 ▣两极直流电动机的物理模 型,F为励磁绕组,A为电 枢绕组,C为补偿绕组。F 和C都在定子上,A在转子 上。 图7-2二极直流电动机的物理模型 F一励磁绕组A一电枢绕组C一补偿绕组 电气与电子工程学院自动化系
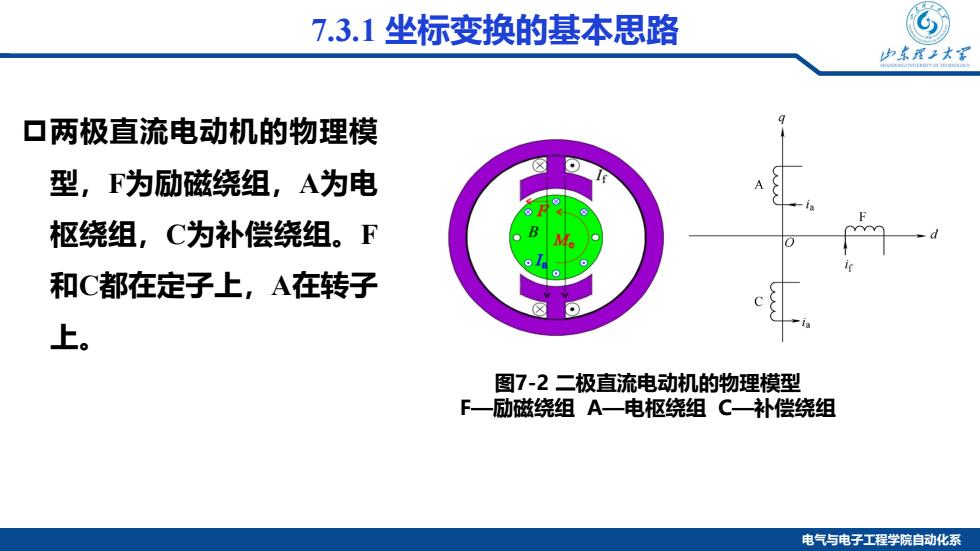
电气与电子工程学院自动化系 7.3.1 坐标变换的基本思路 两极直流电动机的物理模 型,F为励磁绕组,A为电 枢绕组,C为补偿绕组。F 和C都在定子上,A在转子 上。 图7-2 二极直流电动机的物理模型 F—励磁绕组 A—电枢绕组 C—补偿绕组
7.3.1坐标变换的基本思路 山东理子大军 ▣把F的轴线称作直轴或轴,主磁通的方向就是沿 着d轴的;A和C的轴线则称为交轴或q轴。 口虽然电枢本身是旋转的,但由于换向器和电刷的 作用,闭合的电枢绕组分成两条支路。电刷两侧 每条支路中导线的电流方向总是相同的。 电气与电子工程学院自动化系
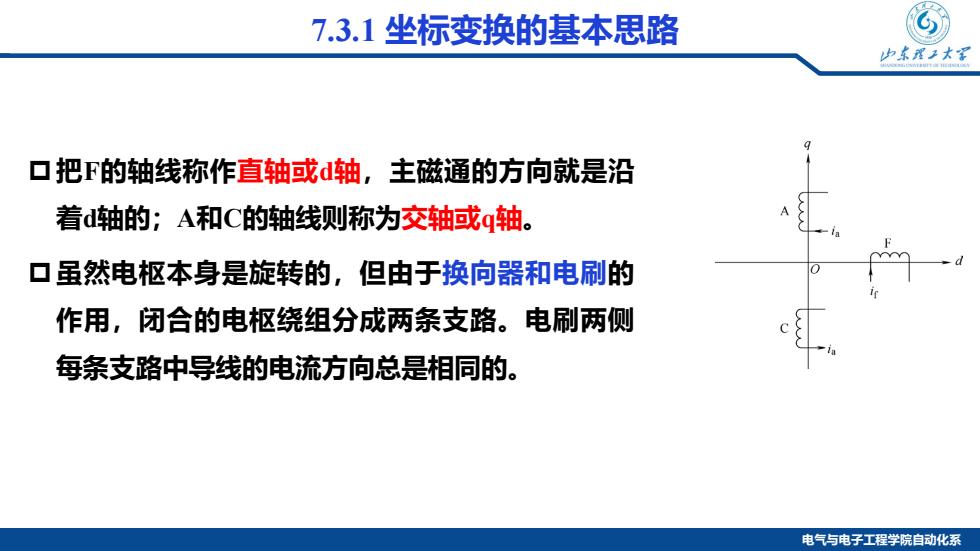
电气与电子工程学院自动化系 把F的轴线称作直轴或d轴,主磁通的方向就是沿 着d轴的;A和C的轴线则称为交轴或q轴。 虽然电枢本身是旋转的,但由于换向器和电刷的 作用,闭合的电枢绕组分成两条支路。电刷两侧 每条支路中导线的电流方向总是相同的。 7.3.1 坐标变换的基本思路
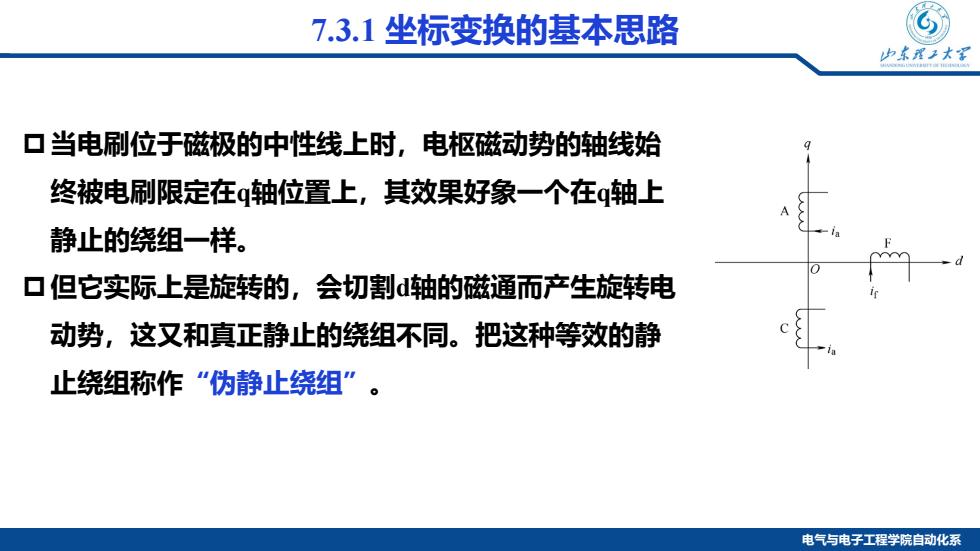
7.3.1坐标变换的基本思路 少求理子大军 口当电刷位于磁极的中性线上时,电枢磁动势的轴线始 终被电刷限定在q轴位置上,其效果好象一个在q轴上 静止的绕组一样。 口但它实际上是旋转的,会切割d轴的磁通而产生旋转电 动势,这又和真正静止的绕组不同。把这种等效的静 止绕组称作”伪静止绕组”。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 7.3.1 坐标变换的基本思路 当电刷位于磁极的中性线上时,电枢磁动势的轴线始 终被电刷限定在q轴位置上,其效果好象一个在q轴上 静止的绕组一样。 但它实际上是旋转的,会切割d轴的磁通而产生旋转电 动势,这又和真正静止的绕组不同。把这种等效的静 止绕组称作“伪静止绕组