目录 山东程上大军 第3章转速闭环控制的直流调速系统 3.1有静差的转速闭环直流调速系统 3.2无静差的转速闭环直流调速系统 3.3转速闭环直流调速系统的限流保护 3.4转速闭环控制直流调速系统的仿真 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 目录 第3章 转速闭环控制的直流调速系统 3.1 有静差的转速闭环直流调速系统 3.2 无静差的转速闭环直流调速系统 3.3 转速闭环直流调速系统的限流保护 3.4 转速闭环控制直流调速系统的仿真
内容提要 山东理子大军 3.2无静差的转速闭环直流调速系统 3.2.1积分调节器和积分控制规律 3.2.2比例积分控制规律 3.2.3无静差的转速闭环直流调速系统稳态参数计算 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 内容提要 3.2 无静差的转速闭环直流调速系统 3.2.1 积分调节器和积分控制规律 3.2.2 比例积分控制规律 3.2.3 无静差的转速闭环直流调速系统稳态参数计算
内容提要 山东我上大军 3.2.1积分调节器和积分控制规律 口1有静差调速系统的动态调节过程 口2问题的提出 口3积分调节器及其特性 口4积分调节器的特点 口5转速的积分控制规律 口6无静差调速系统的动态调节过程(与比例比较) 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 内容提要 3.2.1 积分调节器和积分控制规律 1 有静差调速系统的动态调节过程 2 问题的提出 3 积分调节器及其特性 4 积分调节器的特点 5 转速的积分控制规律 6 无静差调速系统的动态调节过程(与比例比较)
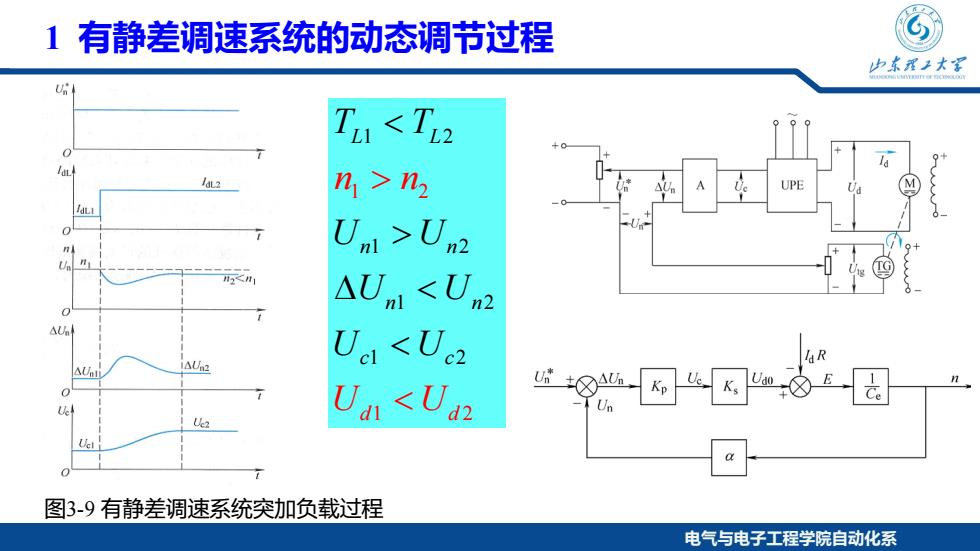
1有静差调速系统的动态调节过程 山东程子大军 U T1<T2 n1≥n2 UPE Um >Un2 2<H1 △Uni<Un2 △Uh IAUn2 U.<U2 公8网4 Un 2 图3-9有静差调速系统突加负载过程 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 1 有静差调速系统的动态调节过程 图3-9 有静差调速系统突加负载过程 1 2 1 2 1 1 2 1 2 2 1 2 L L n d n n d n c c T T U U U n n U U U U U < > ∆ < > < <
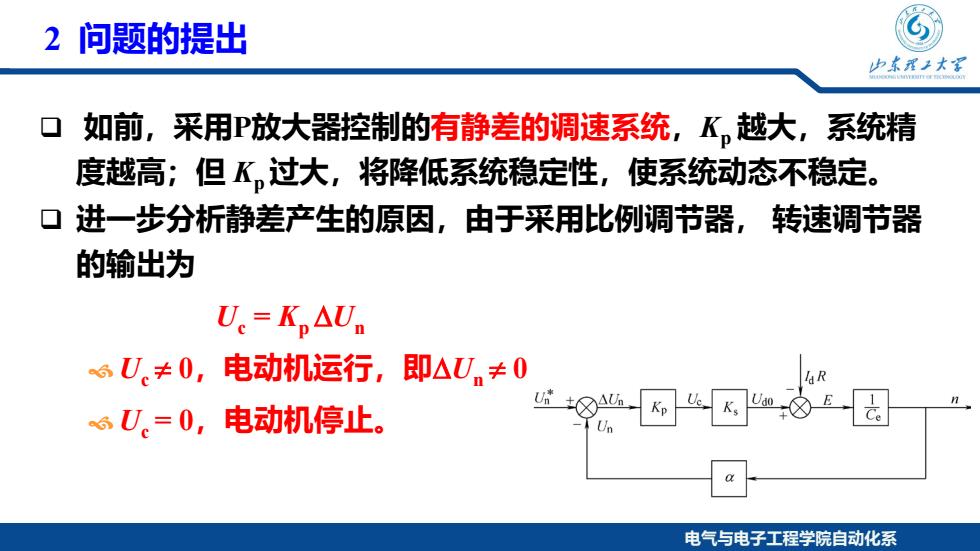
2问题的提出 少东我上大深 如前,采用P放大器控制的有静差的调速系统,K。越大,系统精 度越高;但K,过大,将降低系统稳定性,使系统动态不稳定。 口进一步分析静差产生的原因,由于采用比例调节器,转速调节器 的输出为 U。=K,AUn 6U≠0,电动机运行,即△Un≠0 6U=0,电动机停止。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 2 问题的提出 如前,采用P放大器控制的有静差的调速系统,Kp 越大,系统精 度越高;但 Kp过大,将降低系统稳定性,使系统动态不稳定。 进一步分析静差产生的原因,由于采用比例调节器, 转速调节器 的输出为 Uc = Kp ∆Un Uc ≠ 0,电动机运行,即∆Un ≠ 0 ; Uc = 0,电动机停止