
本章目录 少求理子大军 第7章基于动态模型的异步电动机调速系统 7.1异步电动机动态数学模型的性质 7.2异步电动机的三相数学模型 7.3坐标变换 7.4异步电动机在正交坐标系上的动态数学模型 7.5异步电动机在正交坐标系上的状态方程 7.6异步电动机按转子磁链定向的矢量控制系统 7.7异步电动机按定子磁链控制的直接转矩控制系统 7.8直接转矩控制系统与矢量控制系统的比较 电气与电子工程学院自动化系
电气与电子工程学院自动化系 本章目录 第7章 基于动态模型的异步电动机调速系统 7.1 异步电动机动态数学模型的性质 7.2 异步电动机的三相数学模型 7.3 坐标变换 7.4 异步电动机在正交坐标系上的动态数学模型 7.5 异步电动机在正交坐标系上的状态方程 7.6 异步电动机按转子磁链定向的矢量控制系统 7.7 异步电动机按定子磁链控制的直接转矩控制系统 7.8 直接转矩控制系统与矢量控制系统的比较
7.4异步电动机在正交坐标系上的动态数学模型 山东理子大军 ▣首先推导静止两相正交坐标系中的数学模型,然后推广到旋转 正交坐标系。 口由于运动方程不随坐标变换而变化,故仅讨论电压方程、磁链 方程和转矩方程。 口在以下论述中,下标s表示定子,下标表示转子。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 7.4 异步电动机在正交坐标系上的动态数学模型 首先推导静止两相正交坐标系中的数学模型,然后推广到旋转 正交坐标系。 由于运动方程不随坐标变换而变化,故仅讨论电压方程、磁链 方程和转矩方程。 在以下论述中,下标 s 表示定子,下标 r 表示转子
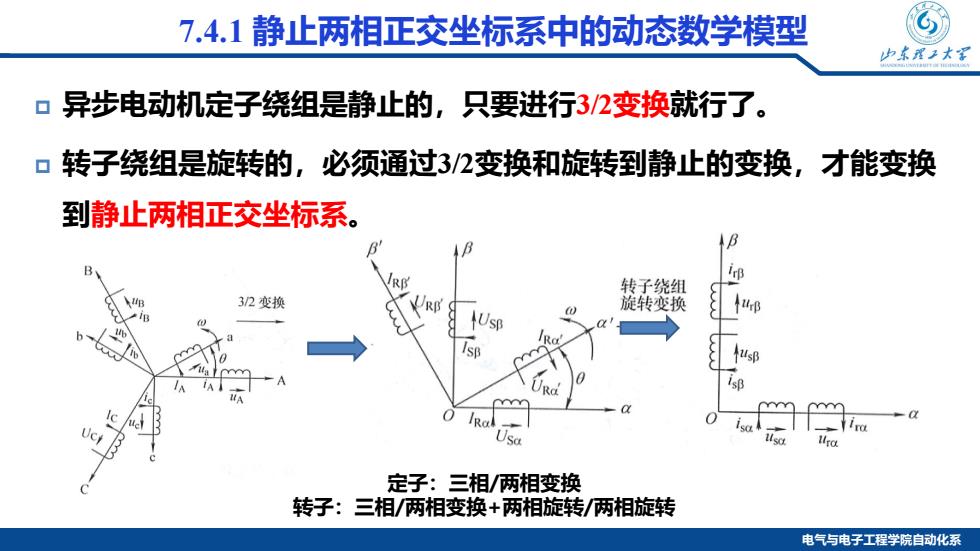
7.4.1静止两相正交坐标系中的动态数学模型 上东程工大军 口异步电动机定子绕组是静止的,只要进行3/2变换就行了。 口转子绕组是旋转的,必须通过3/2变换和旋转到静止的变换,才能变换 到静止两相正交坐标系。 B 转子绕组 32变换 旋转变换 sβ YYY 定子:三相/两相变换 转子:三相/两相变换+两相旋转/两相旋转 电气与电子工程学院自动化系
电气与电子工程学院自动化系 异步电动机定子绕组是静止的,只要进行3/2变换就行了。 转子绕组是旋转的,必须通过3/2变换和旋转到静止的变换,才能变换 到静止两相正交坐标系。 7.4.1 静止两相正交坐标系中的动态数学模型 定子:三相/两相变换 转子:三相/两相变换+两相旋转/两相旋转

1.定子绕组和转子绕组的3/2变换 中东程子大军 口对静止的定子三相绕组和旋转的转子三相绕组进行相同的3/2变换,变 换后的定子两相正交坐标系静止,而转子两相正交坐标系以ω角速度逆 时针旋转。 电压方程: [Rs 0 0 sa 0 R 0 d ΨsB Ura 0 0 lra dt 0 电气与电子工程学院自动化系
电气与电子工程学院自动化系 1. 定子绕组和转子绕组的3/2变换 对静止的定子三相绕组和旋转的转子三相绕组进行相同的3/2变换,变 换后的定子两相正交坐标系静止,而转子两相正交坐标系以ω角速度逆 时针旋转。 电压方程: + = ′ ′ ′ ′ ′ ′ β α β α β α β α β α β α ψ ψ ψ ψ r r s s r r s s r r s s r r s s dt d i i i i 0 0 0 R 0 0 R 0 0 R 0 0 R 0 0 0 u u u u
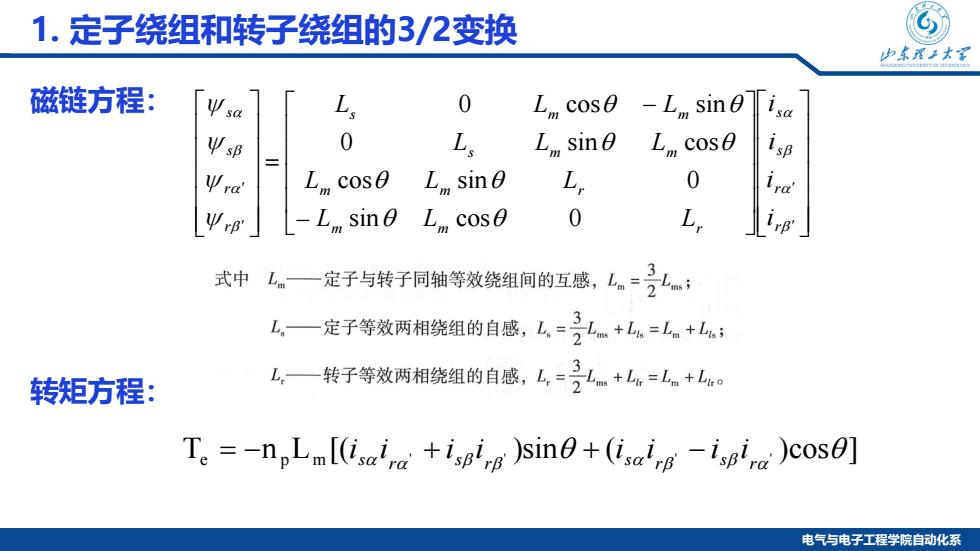
1.定子绕组和转子绕组的3/2变换 少求理子大军 磁链方程: Ls L cose -L sine isa W sB 0 Lo L.sin L cose Ψra L cose L sine L, 0 ira VB」 -L sine L cose 0 L, ig」 式中L。一定子与转子同轴等效绕组间的互感,L。= 人一定子等效两相绕组的自盛,人=弘+忆=。+: 转矩方程: L。一转子等效两相绕组的自感,人,=+h,=人。+山。 Te=-npLm[(isai +ispi)sine+(isairisir)cose] 电气与电子工程学院自动化系
电气与电子工程学院自动化系 磁链方程: − − = ′ ′ ′ ′ β α β α β α β α θ θ θ θ θ θ θ θ ψ ψ ψ ψ r r s s m m r m m r s m m s m m r r s s i i i i L L L L L L L L L L L L sin cos 0 cos sin 0 0 sin cos 0 cos sin 转矩方程: T n L [( ' ' )sin ( ' ' )cos ] e p m θ θ sα rα sβ rβ sα rβ sβ rα = − i i + i i + i i − i i 1. 定子绕组和转子绕组的3/2变换