
↑jω ↑K,→0 [s] P(K=0) (K,=1) P(K,=0) 之 一1 0 ↓K,→0 图6-1例6-1的根轨迹 6
6 j -2 -1 0 Kr → Kr → ( 0) P1 Kr = ( 0) (Kr =1) P2 Kr = [s] 图 6 -1 例 6 - 1的根轨迹
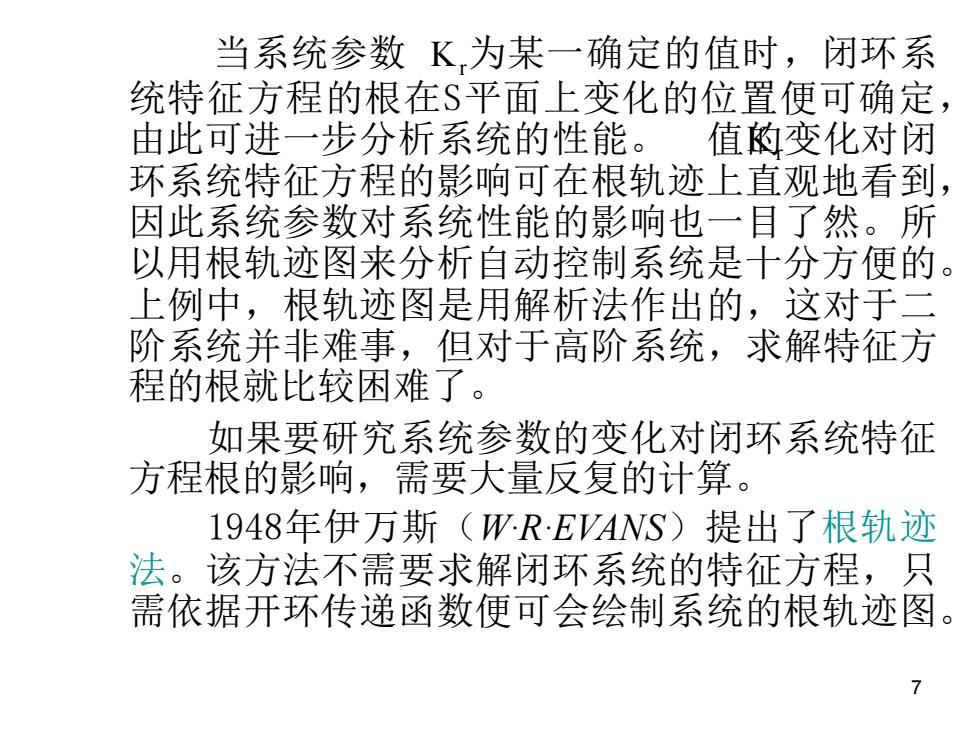
当系统参数K为某一确定的值时,闭环系 统特征方程的根在$平面上变化的位置便可确定, 由此可进一步分析系统的性能。值的变化对闭 环系统特征方程的影响可在根轨迹上直观地看到, 因此系统参数对系统性能的影响也一目了然。所 以用根轨迹图来分析自动控制系统是十分方便的。 上例中,根轨迹图是用解析法作出的,这对于二 阶系统并非难事,但对于高阶系统,求解特征方 程的根就比较困难了。 如果要研究系统参数的变化对闭环系统特征 方程根的影响,需要大量反复的计算。 1948年伊万斯(WR·EVANS)提出了根轨迹 法。该方法不需要求解闭环系统的特征方程,只 需依据开环传递函数便可会绘制系统的根轨迹图
7 当系统参数 为某一确定的值时,闭环系 统特征方程的根在S平面上变化的位置便可确定, 由此可进一步分析系统的性能。 值的变化对闭 环系统特征方程的影响可在根轨迹上直观地看到, 因此系统参数对系统性能的影响也一目了然。所 以用根轨迹图来分析自动控制系统是十分方便的。 上例中,根轨迹图是用解析法作出的,这对于二 阶系统并非难事,但对于高阶系统,求解特征方 程的根就比较困难了。 如果要研究系统参数的变化对闭环系统特征 方程根的影响,需要大量反复的计算。 1948年伊万斯(W·R·EVANS)提出了根轨迹 法。该方法不需要求解闭环系统的特征方程,只 需依据开环传递函数便可会绘制系统的根轨迹图。 Kr Kr
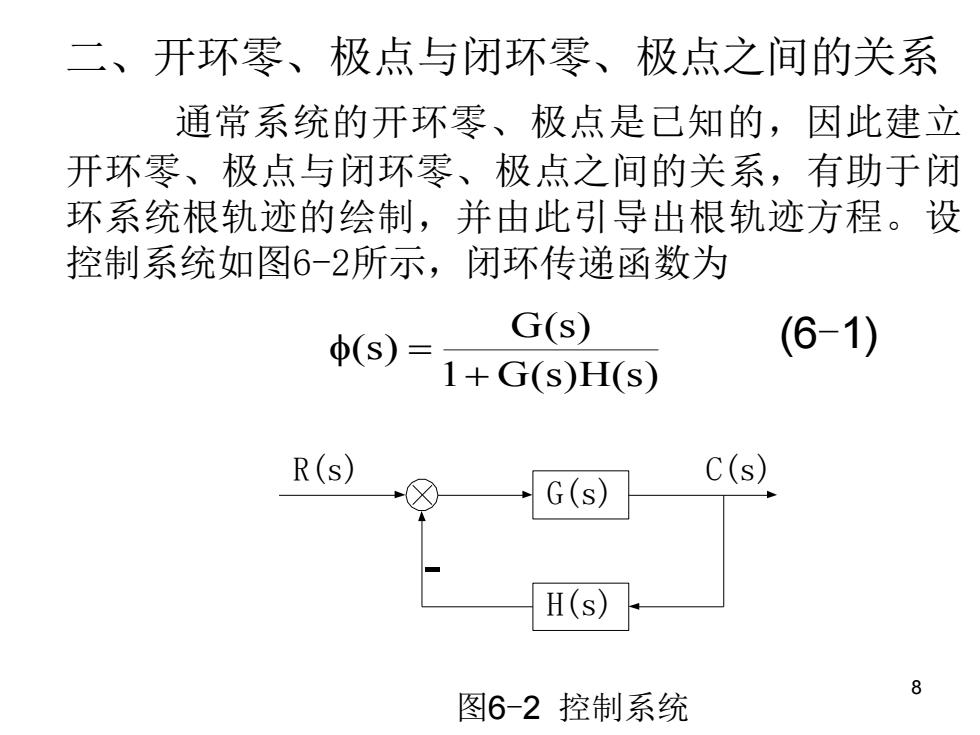
二、开环零、极点与闭环零、极点之间的关系 通常系统的开环零、极点是己知的,因此建立 开环零、极点与闭环零、极点之间的关系,有助于闭 环系统根轨迹的绘制,并由此引导出根轨迹方程。设 控制系统如图6-2所示,闭环传递函数为 G(s) (s)= (6-1) 1+G(s)H(s) R(s) C(s) G(s) H(s 8 图6-2控制系统
8 二、开环零、极点与闭环零、极点之间的关系 通常系统的开环零、极点是已知的,因此建立 开环零、极点与闭环零、极点之间的关系,有助于闭 环系统根轨迹的绘制,并由此引导出根轨迹方程。设 控制系统如图6-2所示,闭环传递函数为 (6-1) - 1 G(s)H(s) G(s) (s) + = G(s) H(s) R(s) C(s) 图6-2 控制系统
前向通路传递函数G(s)和反馈通路传递函数H(s 可分别表示 (s+1) G(s)=K1 j=1 月s-,) (6-2) sv A(Ts+1) "s (s-P) -1 (ts+) H(s)=K2 点(s-乙) 4(Ts+1) (s-B) (6-3) 式中K1为前向通路增益,Kr为前向通路根轨 迹增益;K2为反馈通路增益,K2为反馈通路根轨迹 增益。 9
9 前向通路传递函数G(s)和反馈通路传递函数H(s) 可分别表示 (6-2) (6-3) 式中 为前向通路增益, 为前向通路根轨 迹增益; 为反馈通路增益, 为反馈通路根轨迹 增益。 = = = = − − = + + = q i 1 i f j 1 j q 1r i 1 i f j 1 j 1 s (s P ) (s Z ) K s (Ts 1) ( s 1) G(s) K = = = = − − = + + = h i 1 i l j 1 j h 2r i 1 i l j 1 j 2 (s P ) (s Z ) K (Ts 1) ( s 1) H(s) K K1 K1r K2 K2r
系统的开环传递函数为 (+D (s-Zj) G(s)H(s)=K- =K. i-1 6-4) (Ts+D ss-P K=K1·K2 为系统的开环增益, K,=Kr·K2r为开环系统的根轨迹增益; m=f+L 为开环系统的零点数, n=q+h+v为开环系统的极点数。 将式(6-2)和(6-4)代入(6-1)可得 K(s-Z)(s-P,) φ(S)= s(s-P)+K,(s-Z,) (6-50
10 系统的开环传递函数为 (6-4) 为系统的开环增益, 为开环系统的根轨迹增益; m=f+L 为开环系统的零点数, 为开环系统的极点数。 将式(6-2)和(6-4)代入(6-1)可得 (6-5) − = = − = = − − = + + = n i 1 i m j 1 j n r i 1 i m j 1 j s (s P ) (s Z ) K s (Ts 1) ( s 1) G(s)H(s) K K K1 K2 = n = q + h + = − = = = − + − − − = m j 1 r i n i 1 i h j 1 j f i 1 1r i s (s P ) K (s Z ) K (s Z ) (s P ) (s) K1r K2r = Kr