第二节 控制系统的复数域数学模型 一、传递函数的概念 二、传递函数的性质 三、典型环节及其传递函数
一、传递函数的概念 二、传递函数的性质 三、典型环节及其传递函数 第二节 控制系统的复数域数学模型
引言 ·控制系统的微分方程:是在时域描述系统动态性能的数 学模型,在给定外作用及初始条件下,求解微分方程可以 得到系统的输出响应。但如果系统的某个参数变化或者结 构形式改变时,便需要重新列写并求解微分方程。 ·传递函数:对线性常微分方程进行拉氏变换,得到的系统 在复数域的数学模型--传递函数。 传递函数不仅可以表征系统的动态特性,而且可以研 究系统的结构或参数变化时对系统性能的影响。传递函数 是经典控制理论中最基本、最重要的概念
引言 • 控制系统的微分方程:是在时域描述系统动态性能的数 学模型,在给定外作用及初始条件下,求解微分方程可以 得到系统的输出响应。但如果系统的某个参数变化或者结 构形式改变时,便需要重新列写并求解微分方程。 • 传递函数:对线性常微分方程进行拉氏变换,得到的系统 在复数域的数学模型----传递函数。 传递函数不仅可以表征系统的动态特性,而且可以研 究系统的结构或参数变化时对系统性能的影响。传递函数 是经典控制理论中最基本、最重要的概念
一、传递函数的概念 图2-4所示的RC电路中电 容的端电压U()。根据克 希霍夫定律,可列写如下 C卡4 1(0)R+4.()=4,() (2.14) 4.(0=∫)d (2.15) 消去中间变量(),得到输入U,) 与输出U,0之间的线性定常微分 图2-4RC电路 方程: RC du (t) 2+ue(t)=u,(t) dt (2.16)
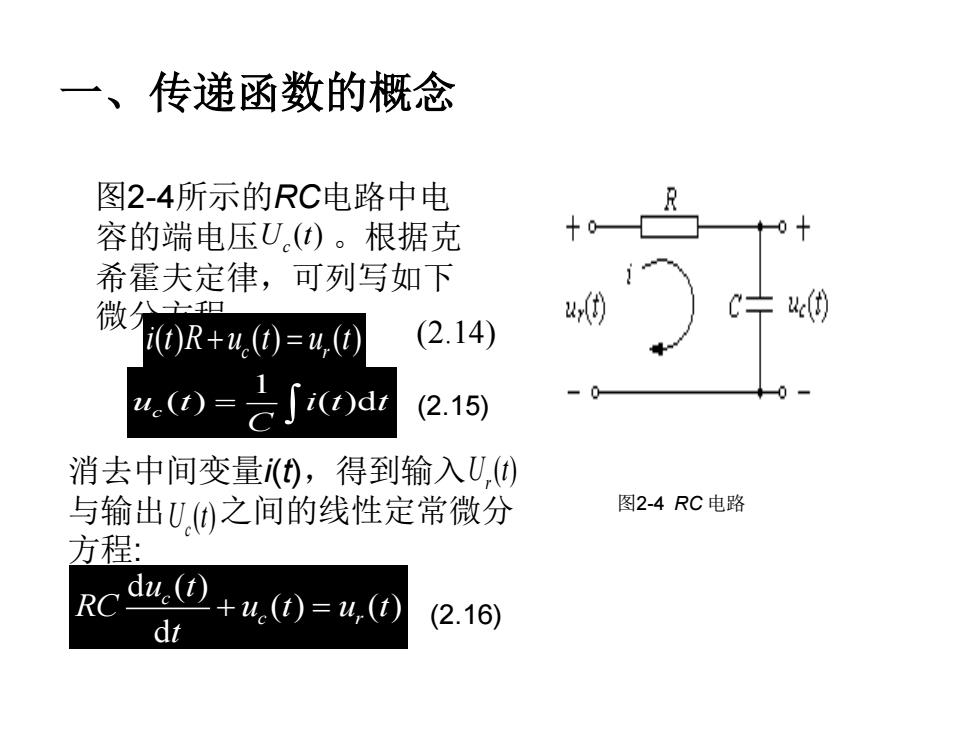
消去中间变量i(t),得到输入 与输出 之间的线性定常微分 方程: 一、传递函数的概念 图2-4所示的RC电路中电 容的端电压 。根据克 希霍夫定律,可列写如下 微分方程: ( ) ( ) ( ) c r i t R u t u t + = (2.14) 1 u t i t t c ( ) ( )d C = (2.15) d ( ) ( ) ( ) d c c r u t RC u t u t t + = (2.16) 图2-4 RC 电路 ( ) U t c ( ) U t c ( ) U t r
现在对上述微分方程两端进行拉氏变换,并考虑电容上的 初始电压U.0),得: RCsU(s)-RCu(0)+U(s)=U,(s) (2.17) 式中U(s)一 输出电U()的拉氏变换; Us)- 输入电压U)的拉氏变换。 由上式求出Uc(S)的表达式: U.(s)= U,(S) RC RCs+1 RC+%.(O) (2.18) 当输入为阶跃电压u,()=41()时,对U(s)求拉氏反变换,即得 4.()的变化规律:
现在对上述微分方程两端进行拉氏变换,并考虑电容上的 初始电压 ,得: ( ) ( ) ( ) ( ) (2.17) RCsU s RCu U s U s c c c r − + = 0 式中 Uc(s)—— 输出电Uc(t)的拉氏变换; Ur(s)—— 输入电压Ur(t)的拉氏变换。 1 ( ) ( ) ( ) 1 1 c r c RC U s U s u RCs RCs = + + + 0 当输入为阶跃电压ur (t)= u0·1(t)时,对Uc (s)求拉氏反变换,即得 uc (t)的变化规律: 由上式求出Uc(s)的表达式: (2.18) (0) Uc
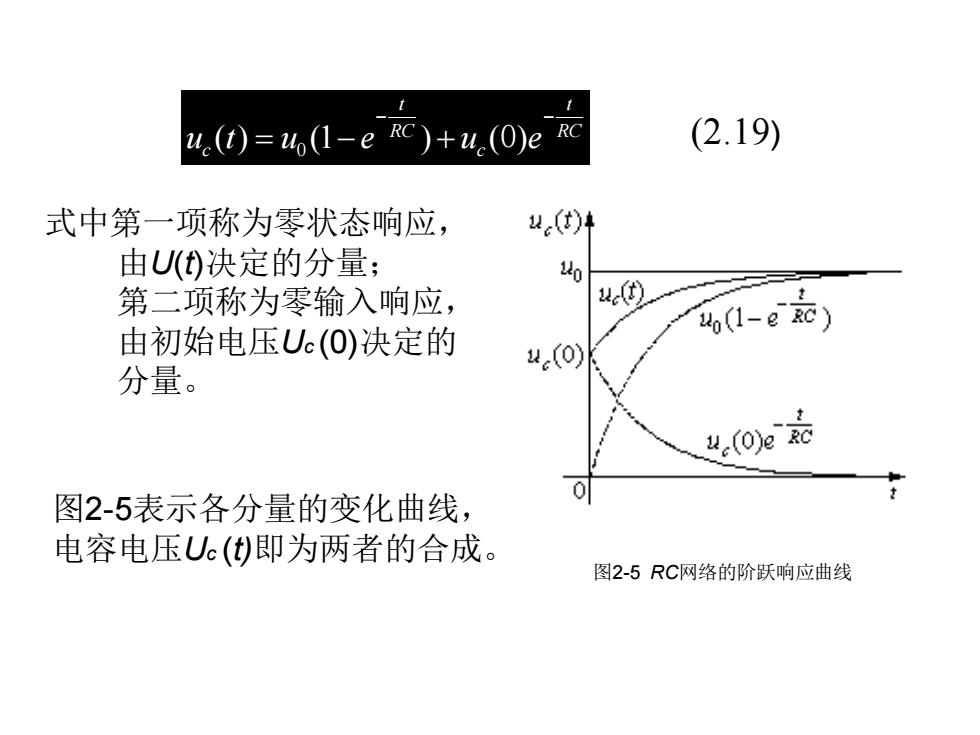
4.(t)=41-eRc)+u.(O)ec (2.19) 式中第一项称为零状态响应, -()H 由U()决定的分量; 40 第二项称为零输入响应, ue(t) uo(1-e zc) 由初始电压Uc(O)决定的 ue(0) 分量。 u(O)e Rc 图2-5表示各分量的变化曲线, 电容电压Uc(t)即为两者的合成。 图2-5RC网络的阶跃响应曲线
0 ( ) (1 ) ( ) t t RC RC u t u e u e c c − − = − + 0 (2.19) 式中第一项称为零状态响应, 由U(t)决定的分量; 第二项称为零输入响应, 由初始电压Uc (0)决定的 分量。 图2-5表示各分量的变化曲线, 电容电压Uc (t)即为两者的合成。 图2-5 RC网络的阶跃响应曲线