内容提要 山东理子大军 3.1有静差的转速闭环直流调速系统 3.1.1比例控制转速闭环直流调速系统的结构与静特性 3.1.2开环系统机械特性和比例控制闭环系统静特性的对比分析 3.1.3闭环直流调速系统的反馈控制规律 3.1.4比例控制转速闭环系统的稳定性 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 内容提要 3.1 有静差的转速闭环直流调速系统 3.1.1 比例控制转速闭环直流调速系统的结构与静特性 3.1.2 开环系统机械特性和比例控制闭环系统静特性的对比分析 3.1.3 闭环直流调速系统的反馈控制规律 3.1.4 比例控制转速闭环系统的稳定性
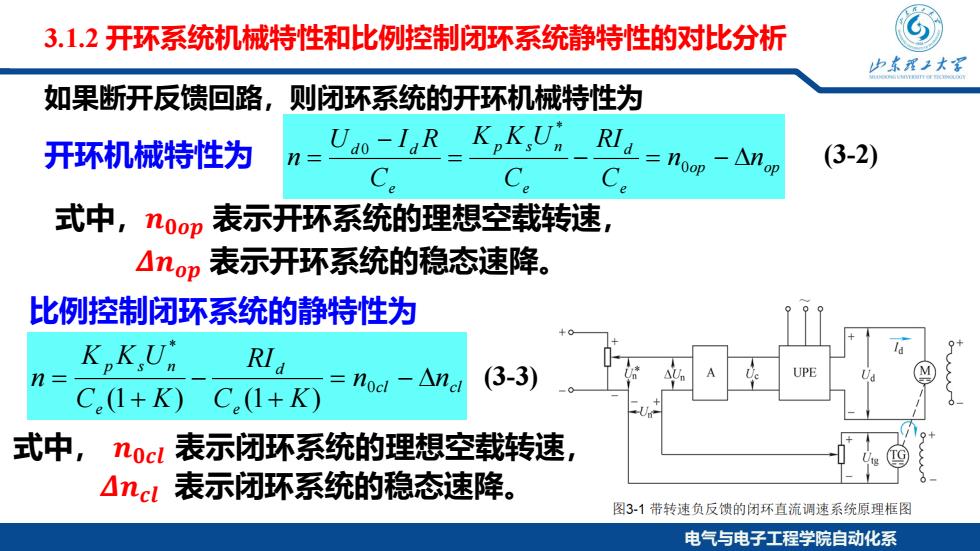
3.1.2开环系统机械特性和比例控制闭环系统静特性的对比分析 山东我上大军 如果断开反馈回路,则闭环系统的开环机械特性为 开环机械特性为 Udo-IaR KpK,U RId (3-2) C. C C =noop -△np 式中,noop 表示开环系统的理想空载转速, △nop表示开环系统的稳态速降。 比例控制闭环系统的静特性为 KKU RIa n= C(1+K)C.(1+K) =nocl-△ne (3-3) UPE 式中,nocl表示闭环系统的理想空载转速, △ncl表示闭环系统的稳态速降。 图3-1带转速负反馈的闭环直流调速系统原理框图 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 op op e d e p s n e d d n n C RI C K K U C U I R n = − = − ∆ − = 0 * 0 3.1.2 开环系统机械特性和比例控制闭环系统静特性的对比分析 如果断开反馈回路,则闭环系统的开环机械特性为 开环机械特性为 式中,𝒏𝒏𝟎𝟎𝟎𝟎𝟎𝟎 表示开环系统的理想空载转速, 𝜟𝜟𝒏𝒏𝒐𝒐𝒐𝒐 表示开环系统的稳态速降。 比例控制闭环系统的静特性为 cl cl e d e p s n n n C K RI C K K K U n = − ∆ + − + = 0 * (1 ) (1 ) 式中, 𝒏𝒏𝟎𝟎𝟎𝟎𝟎𝟎 表示闭环系统的理想空载转速, 𝜟𝜟𝒏𝒏𝒄𝒄𝒄𝒄 表示闭环系统的稳态速降。 (3-2) (3-3)
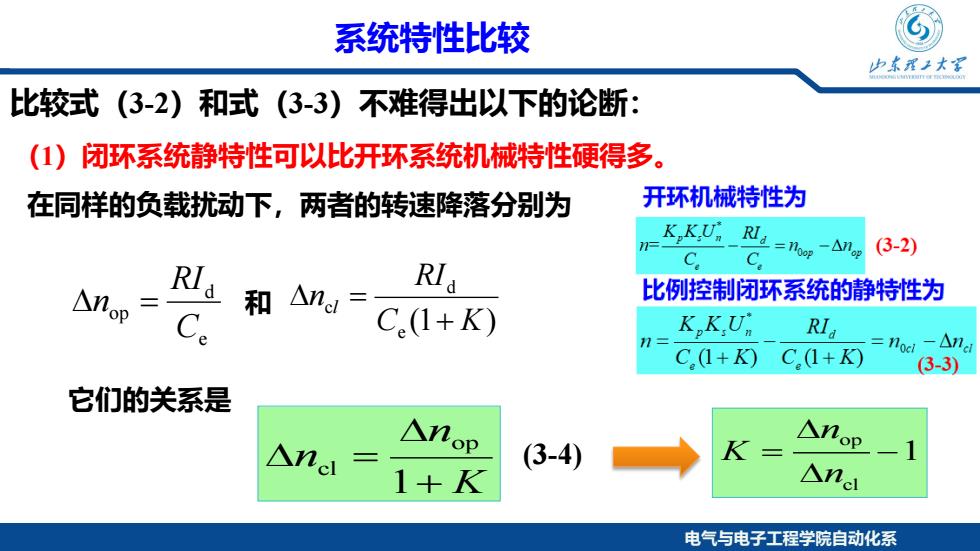
系统特性比较 山东程子大军 比较式(3-2)和式(3-3)不难得出以下的论断: (1)闭环系统静特性可以比开环系统机械特性硬得多。 在同样的负载扰动下,两者的转速降落分别为 开环机械特性为 K KU RIa C C -=- (3-2) RIa △nop= 和n.=C.+K) 比例控制闭环系统的静特性为 KK.U RI =oc-△na C,1+K) C.1+K) 3-3) 它们的关系是 △nop △ncl △nop (3-4) 1+K △nel 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 系统特性比较 比较式(3-2)和式(3-3)不难得出以下的论断: (1)闭环系统静特性可以比开环系统机械特性硬得多。 在同样的负载扰动下,两者的转速降落分别为 和 它们的关系是 K n n + ∆ ∆ = 1 op cl (3-4) e d op C RI ∆n = (1 ) e d c C K RI n l + ∆ = op cl 1 n K n ∆ = − ∆
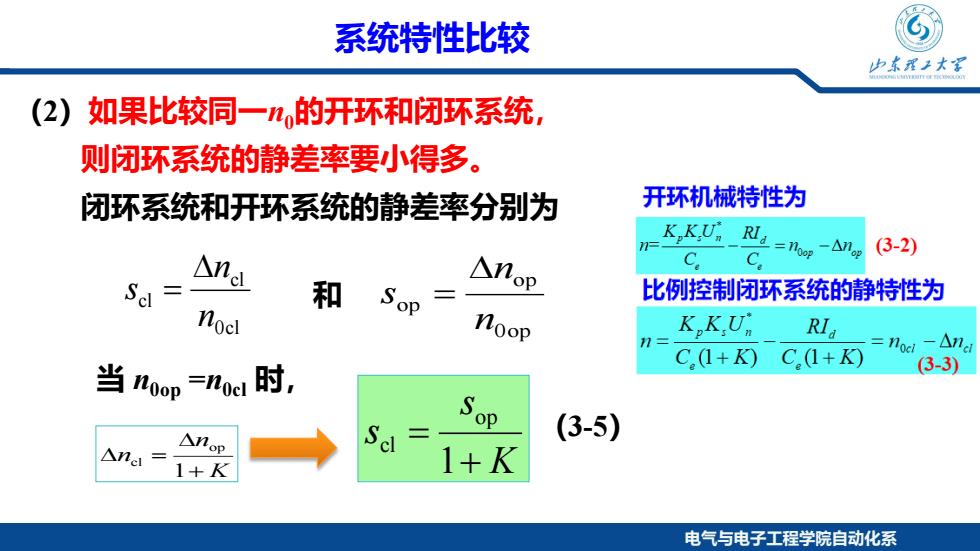
系统特性比较 山东我上大深 (2)如果比较同一n的开环和闭环系统, 则闭环系统的静差率要小得多。 闭环系统和开环系统的静差率分别为 开环机械特性为 K KU:RI Ana △nop C =nop-△ne(3-2) Sel 和 比例控制闭环系统的静特性为 nocl noop KKU RI noc-△na C.1+C.1+K) 当op=nel时, 3-3) op △ne= △nop 三 (3-5) 1+K 1+K 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 系统特性比较 (2)如果比较同一n0的开环和闭环系统, 则闭环系统的静差率要小得多。 闭环系统和开环系统的静差率分别为 和 当 n0op =n0cl 时, 0cl cl cl n n s ∆ = 0op op op n n s ∆ = K s s + = 1 op cl (3-5) K n n + ∆ ∆ = 1 op cl
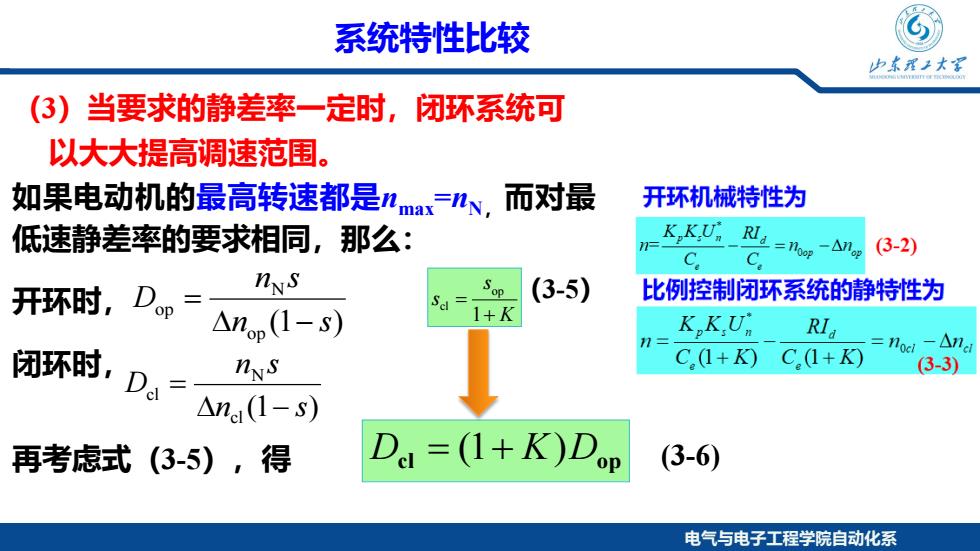
系统特性比较 山东理子大军 (3)当要求的静差率一定时,闭环系统可 以大大提高调速范围。 如果电动机的最高转速都是nmax=n, 而对最 开环机械特性为 低速静差率的要求相同,那么: KK,URL。 (3-2) C C 开环时,Dp= nS Sop (3-5) 比例控制闭环系统的静特性为 △np(1-S) 1+K KK.U RI 1三 =oc-△na 闭环时, D nS C1+KC.1+K) (3-3) △n.(1-s) 再考虑式(3-5),得 De =(1+K)Dop (3-6) 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 系统特性比较 (3)当要求的静差率一定时,闭环系统可 以大大提高调速范围。 如果电动机的最高转速都是nmax =nN,而对最 低速静差率的要求相同,那么: 开环时, 闭环时, 再考虑式(3-5),得 Dcl K Dop = (1+ ) (3-6) (1 ) op N op n s n s D ∆ − = (1 ) cl N cl n s n s D ∆ − = K s s + = 1 op cl (3-5)