稳态分析条件 少东我子大深 口下面分析闭环调速系统的稳态特性,以确定它如何能够减少 转速降落。 口为了突出主要矛盾,先作如下的假定: ◆1)忽略各种非线性因素,假定系统中各环节的输入输出 关系都是线性的,或者只取其线性工作段。 ◆2)忽略控制电源和电位器的内阻。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 稳态分析条件 下面分析闭环调速系统的稳态特性,以确定它如何能够减少 转速降落。 为了突出主要矛盾,先作如下的假定: 1)忽略各种非线性因素,假定系统中各环节的输入输出 关系都是线性的,或者只取其线性工作段。 2)忽略控制电源和电位器的内阻
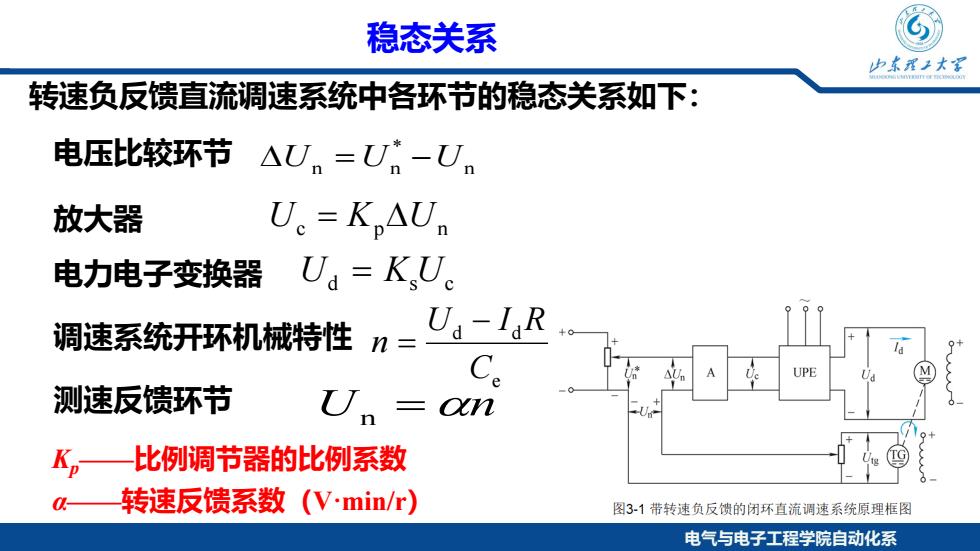
稳态关系 山东程子大军 转速负反馈直流调速系统中各环节的稳态关系如下: 电压比较环节△Un=U。-U。 放大器 U。=KAUa 电力电子变换器 Ua=KU. 调速系统开环机械特性 n= Ud-IaR Ce UPE 测速反馈环节 K,— 比例调节器的比例系数 转速反馈系数(Vmin/r) 图31带转速负反馈的闭环直流调速系统原理框图 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 稳态关系 转速负反馈直流调速系统中各环节的稳态关系如下: 电压比较环节 n * ∆Un =Un −U 放大器 Uc = Kp∆Un 测速反馈环节 Un =αn 电力电子变换器 Ud = Ks Uc 调速系统开环机械特性 e d d C U I R n − = Kp——比例调节器的比例系数 α——转速反馈系数(V·min/r)
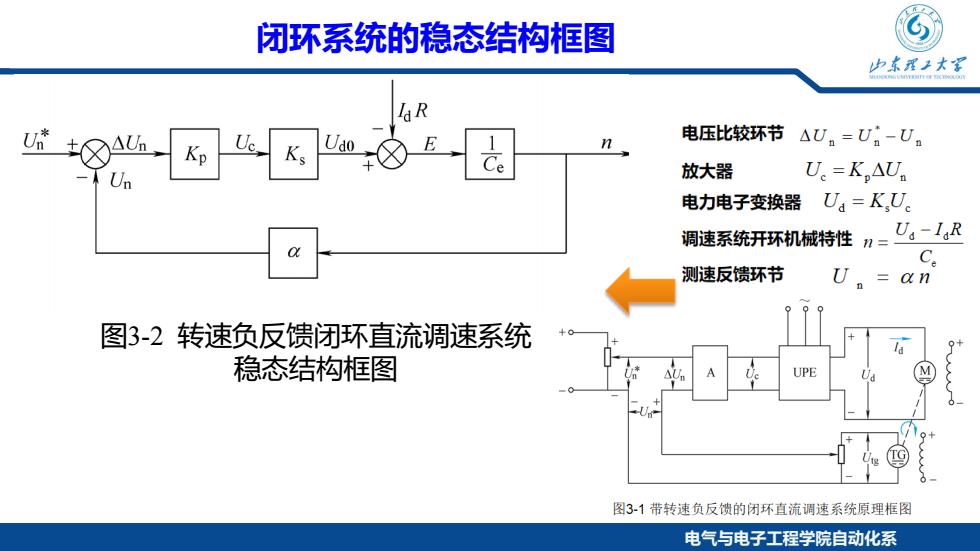
闭环系统的稳态结构框图 山东我上大军 电压比较环节 △Un=Um-U. Kp I Un e 放大器 U=K.△U. 电力电子变换器 U=KU. 调速系统开环机械特性n=:-一1,R Ce 测速反馈环节 U。=a 图3-2转速负反馈闭环直流调速系统 稳态结构框图 UPE 图31带转速负反馈的闭环直流调速系统原理框图 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 闭环系统的稳态结构框图 图3-2 转速负反馈闭环直流调速系统 稳态结构框图
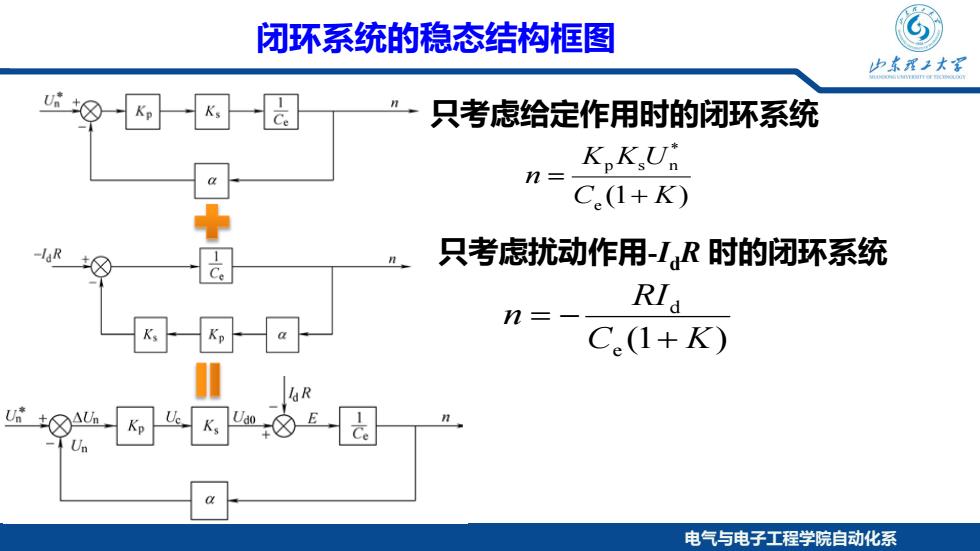
闭环系统的稳态结构框图 山东程子大军 n 只考虑给定作用时的闭环系统 KpKsUn n= C.(1+K) 只考虑扰动作用-I,R时的闭环系统 RI n= C.(1+K) K:K.t 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 闭环系统的稳态结构框图 只考虑给定作用时的闭环系统 只考虑扰动作用-IdR 时的闭环系统 (1 ) e * p s n C K K K U n + = (1 ) e d C K RI n + = −
静特性方程 山东我上大深 得到转速负反馈单闭环直流调速系统的静特性方程式 K KU-IaR KKU RIa n= C.(1+KK a/Ce)Ce(1+K) Ce(1+K) 式中,闭环系统的开环放大系数K为 K= KK:q C 闭环调速系统的静特性表示闭环系统电动机转速与负载 电流 (或转矩) 间的稳态关系。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 静特性方程 得到转速负反馈单闭环直流调速系统的静特性方程式 (1 / ) (1 ) (1 ) e d e * p s n e p s e d * p s n C K RI C K K K U C K K C K K U I R n + − + = + − = α 式中,闭环系统的开环放大系数K为 e p s C K K K α = 闭环调速系统的静特性表示闭环系统电动机转速与负载 电流(或转矩)间的稳态关系