
三.二维系统极限环的简介 首先看一例子。 例4试讨论二维系统 x=y+x0-x2-y2) y'=-x+y0-x2-y2】 (621) 的轨线性态。 解系统(6.21)有唯一奇点(0,0),其近似线性方程为 [x'=x+y y=-x+y (6.22) 元2=1士1,所以系统(6.22)的奇点为不稳定的焦点,系统(621)的奇点也为不稳定的。为便 于讨论,我们取极坐标x=rcos0,y=rsin0,则系统(6.21)可化为等价系统 (6.23) (4 =-1 de 不难解得r= +e,8=8-1,其中记c=1-5 ,即系统有解 vitceysin(t) x=cos(-1) vI+ce 这里解满足初始条件r0)=,60)=8,c=一上。基于以上解的表达式知:当6<1时。 解在单位圆内省告>0,此时且当一时厦时能向单包,当6>1时。解在争园 外有<0,此时且当1→时顺时针绕向单位圆。其轨线性态如图6.10所示。注意这 d山 图(6.10) 名
126 三. 二维系统极限环的简介 首先看一例子。 例 4 试讨论二维系统 ( ) ( ) ′ = − + − − ′ = + − − 2 2 2 2 1 1 y x y x y x y x x y (6.21) 的轨线性态。 解 系统(6.21)有唯一奇点( 0,0 ),其近似线性方程为 ′ = − + ′ = + y x y x x y (6.22) 记 − = 1 1 1 1 A ,其特征方程为 ( ) ( ) 1 1 0 1 1 1 1 det 2 = − + = − − − − = λ λ λ λE A ,特征值为 = 1± i λ 2,1 ,所以系统(6.22)的奇点为不稳定的焦点,系统(6.21)的奇点也为不稳定的。为便 于讨论,我们取极坐标 x = r cosθ, y = rsinθ ,则系统(6.21)可化为等价系统 ( ) = − = − 1 1 2 dt d r r dt dr θ (6.23) 不难解得 0 2 1 , 1 t r t ce θ θ − = = − + ,其中记 2 0 2 0 1 r c r − = ,即系统有解 ( 0 0 ) ( ) 2 2 cos sin , 1 1 t t t t x y ce ce θ θ − − − − = = + + 。 这里解满足初始条件 ( ) 0 0 r 0 = r ,θ )0( = θ , 2 0 2 0 1 r c r − = 。基于以上解的表达式知:当 1 r0 < 时, 解在单位圆内有 > 0 dt dr ,此时且当t → +∞时顺时针绕向单位圆;当 1 r0 > 时,解在单位园 外有 < 0 dt dr ,此时且当t → +∞时顺时针绕向单位圆。其轨线性态如图(6.10)所示。注意这 图(6.10)
里出现了常系数线性系统中不可能出现的情况:系统(6.21)有一个孤立的闭轨线单位圆,其 他轨线或从圆内或圆外顺时针绕向单位圆。 定义6孤立的闭轨线称为极限环 考虑二维系统 =Px) h (6.24) 这里P,Q在相平面的区域G上连续可微。 关于以上二雏系统的极限环有如下三种类型: (@)稳定极限环若存在包含极限环「的环形域U,使得从U内出发的轨线当时都渐近地接 近极限环 (b)不稳定极限环 若存在包含极限环的环形域U,使得从U内出发的轨线当1→-∞时都 渐近地接近极限环: (©)半稳定极限环若存在包含极限环的环形域U,使得从外(内)邻域出发的轨线当 1→+∞时都渐近地接近极限环,而从内(外)邻域出发的轨线当1→一∞时都渐近地接近 极限环。 例如前面例4中极限环「:x2+y2=1为稳定的。对于系统 x'=y+x2+y2-) y=-x+62+y2-)可 得极限环「:x2+y2=1为不稳定的,对于系统r=-少-(2+少2-旷 可得极限环 y=x-x2+y2-1月 下:x2+y2=1为半稳定的。对与这两个例子留给同学作为练习. 关于二维非线性系统,在相平面上确定该系统是否存在极限环,若存在,有几个,位置如 何,以及极限环是否稳定等,一有是一维系统定性理论及其应用的重要句颗。在这方面。中 国数学家作出了突出的贡制 注61901年著名数学家希尔伯特在国际数学大会上提出了著名的23个数学难题,其中第 16个问题的后半部分可陈述为:记P(x,y)和Q(x,y)是x,y的n次多项式,则对于给定的 Pn(xy)与n(xy以,系统 (x'=P(x.y) y'=Q.x,y) (6.25) 最多有几个极限环?它们的相对位置如何?这是世界公认的数学难题,这个问题即使在等 于2的情形也没有完全解决。 下面给出关于极限环问题常用的两个定理,同时作为应用讨论了范德坡(van der Pol)方程 等两方程 定理5(Bendixson环域定理)对于系统(6.24,若在G域内存在有界的环形闭域D,在其 内不含有系统(624)的奇点,而(624)的经过域D上点的解x=x)y=)当1增加(或减 121
127 里出现了常系数线性系统中不可能出现的情况:系统(6.21)有一个孤立的闭轨线单位圆,其 他轨线或从圆内或圆外顺时针绕向单位圆。 定义 6 孤立的闭轨线称为极限环。 考虑二维系统 = = ( , ) ( , ) Q x y dt dy P x y dt dx (6.24) 这里 P,Q 在相平面的区域G 上连续可微。 关于以上二维系统的极限环有如下三种类型: (a)稳定极限环 若存在包含极限环Γ 的环形域U ,使得从U 内出发的轨线当时都渐近地接 近极限环; (b)不稳定极限环 若存在包含极限环的环形域U ,使得从U 内出发的轨线当t → −∞ 时都 渐近地接近极限环; (c)半稳定极限环 若存在包含极限环的环形域U ,使得从外(内)邻域出发的轨线当 t → +∞时都渐近地接近极限环,而从内(外)邻域出发的轨线当t → −∞时都渐近地接近 极限环。 例如 前面例 4 中极限环Γ : 1 2 2 x + y = 为稳定的。对于系统 ( ) ( ) ′ = − + + − ′ = + + − 1 1 2 2 2 2 y x y x y x y x x y 可 得极限环 Γ : 1 2 2 x + y = 为不稳定的,对于系统 ( ) ( ) ′ = − + − ′ = − − + − 2 2 2 2 2 2 1 1 y x y x y x y x x y 可得极限环 Γ : 1 2 2 x + y = 为半稳定的。对与这两个例子留给同学作为练习。 关于二维非线性系统,在相平面上确定该系统是否存在极限环,若存在,有几个,位置如 何,以及极限环是否稳定等,一直是二维系统定性理论及其应用的重要问题。在这方面,中 国数学家作出了突出的贡献。 注6 1901 年著名数学家希尔伯特在国际数学大会上提出了著名的 23 个数学难题,其中第 16 个问题的后半部分可陈述为:记 P (x y) n , 和Q (x y) n , 是 x, y 的n 次多项式,则对于给定的 P (x y) n , 与Q (x y) n , ,系统 ( ) ( ) ′ = ′ = y Q x y x P x y n n , , (6.25) 最多有几个极限环?它们的相对位置如何?这是世界公认的数学难题,这个问题即使在n 等 于 2 的情形也没有完全解决。 下面给出关于极限环问题常用的两个定理,同时作为应用讨论了范德坡(van der Pol)方程 等两方程. 定理 5(Bendixson 环域定理) 对于系统(6.24),若在G 域内存在有界的环形闭域 D ,在其 内不含有系统(6.24)的奇点,而(6.24)的经过域 D 上点的解 x = x(t), y = y(t)当t 增加(或减

少)时不离开该域D,则或D边界本身是一个闭轨线,或在D内至少存在一个极限环。 定理6 Dulac判别法)对于系统6.24),设DcG为单连通区域,若存在函数B(x,y)≠0 其在D上具有-阶连续导数,且BP)+BO)在D内不变号,在D的任何子拨中不 dx d办y 相为零。系统624在D内无闭轨线,更无极限环 证明反证,假设结论不真,不妨设在D内存在闭轨线「,其可表为周期为T的周期解 T:x=x(t)y=y(t). 0≤1≤T,记「所围成的区域为D(D,CD显然)。由格林公 式得 ),BOkd=BP-B0k=【BPQ-QPh=0. 这与定理的假设条件矛盾,故在域D内不存在任何周期解更不存在任何极限环。证毕 例5证明范德坡方程 3 +-+=0 (6.26) (这里4>0) 存在极限环。 证明仅证4=1情形,其余情形类似。 方程可化为等价的系统 [dx (6.27) =-x+(1-x2b 系统只有一个奇点(0,0),(0,0)处的线性近似系统为 =y (6.28) =-x+y 特征方程近-A久.术-+1=0的特征根为九,生3可知特都 2 根有正实部,所以是系统的不稳定奇点。 令(,y)=x2+y2-r2,这里0<r<1。计算V(,y)沿着系统(6.27)线的全导数 =2x+2m=20-x2y2≥0, dt 128
128 少)时不离开该域 D ,则或 D 边界本身是一个闭轨线,或在 D 内至少存在一个极限环。 定理 6(Dulac 判别法) 对于系统(6.24),设 D ⊂ G 为单连通区域,若存在函数 B(x, y) ≠ 0, 其在 D 上具有一阶连续偏导数,且 ( ) ( ) y BQ x BP ∂ ∂ + ∂ ∂ 在 D 内不变号,在 D 的任何子域中不 恒为零,则系统(6.24)在 D 内无闭轨线,更无极限环。 证明 反证,假设结论不真,不妨设在 D 内存在闭轨线 Γ ,其可表为周期为T 的周期解 Γ : x = x(t), y = y(t), 0 ≤ t ≤ T ,记Γ 所围成的区域为 DΓ( DΓ ⊂ D 显然)。由格林公 式得 ( ) ( ) ( ) ∫∫ ∫ ∫ = − = − = ∂ ∂ + ∂ ∂ Γ Γ T D dxdy BPdy BQdx B PQ QP dt y BQ x BP 0 0 , 这与定理的假设条件矛盾,故在域 D 内不存在任何周期解更不存在任何极限环。证毕 例 5 证明范德坡方程 ( ) 1 0 2 2 2 + − + x = dt dx x dt d x µ (6.26) (这里 µ > 0) 存在极限环。 证明 仅证 µ = 1情形,其余情形类似。 方程可化为等价的系统 ( ) = − + − = x x y dt dy y dt dx 2 1 (6.27) 系统只有一个奇点( 0,0 ),( 0,0 )处的线性近似系统为 = − + = y x y x y & & (6.28) 其特征方程 ( ) 1 0 1 1 1 det 2 = − + = − − − = λ λ λ λ λE A 的特征根为 2 1 3 2,1 ± i λ = ,可知特征 根有正实部,所以是系统的不稳定奇点。 令 ( ) 2 2 2 V x, y = x + y − r ,这里0 < r < 1。计算V(x, y)沿着系统(6.27)轨线的全导数 ( ) 2 2 2( ) 1 0 2 2 27.6 = xx + yy = − x y ≥ dt dV & &

所以可以取圆周x2+y2=r2为内境界线L1,这表明系统(6.27)从L上出发的轨线走向L 所围成区域的外部。下面作环域的外境界线L2· 在水平等倾线左上支取一点A,过A作线性近似方程(6.28)的轨线,此轨线交y轴于点B(由 于轨线满足少 二x+y>0),在弧B上比较6.27)之轨线方向与弧B的切线方向,有 -x+-x少-x+y=-x2<0, 所以系统(627)之轨线与AB相交时轨线自外向内。 过点B作方程 di=y (6.29) 的轨线,此轨线交直线x=1于点C,在弧BC上有 0-沙-业=<0 所以系统(627)之轨线与BC相交时,轨线自外向内。 过点C作方程 (6.30) 的轨线,即以原点为中心,过点C之圆弧,交x轴于点D。在弧CD上(>1)有 -x+-=-x2k0, 所以系统(6,27)之轨线与C相交时自外向内 在过点D作垂直的直线段交水平等倾线Q(x,y)=-x+1-x2少y=0的右下支于点E。 在线段DE上轨线自外向内。在Q(x,y)=0的右下支上轨线(由于京=y<0,夕=0)也自 129
129 所以可以取圆周 2 2 2 x + y = r 为内境界线 L1,这表明系统(6.27)从 L1上出发的轨线走向 L1 所围成区域的外部。下面作环域的外境界线 L2 。 在水平等倾线左上支取一点 A ,过 A 作线性近似方程(6.28)的轨线,此轨线交 y 轴于点 B(由 于轨线满足 > 0 − + = y x y dx dy ),在弧 AB 上比较(6.27)之轨线方向与弧 AB 的切线方向,有 ( ) 0 1 2 2 = − < − + − − + − x y x y y x x y , 所以系统(6.27)之轨线与 AB 相交时轨线自外向内。 过点 B 作方程 ( ) = − = x y dt dy y dt dx 2 1 (6.29) 的轨线,此轨线交直线 x = 1于点C ,在弧 BC 上有 ( ) ( ) 0 1 1 2 2 = − < − − − + − y x y x y y x x y , 所以系统(6.27)之轨线与 BC 相交时,轨线自外向内。 过点C 作方程 = − = x dt dy y dt dx (6.30) 的轨线,即以原点为中心,过点C 之圆弧,交 x 轴于点 D 。在弧CD 上( x > 1)有 ( ) ( ) 1 0 1 2 2 = − < − − − + − x y x y x x y , 所以系统(6.27)之轨线与CD 相交时自外向内。 在过点 D 作垂直的直线段交水平等倾线 ( , ) (1 ) 0 2 Q x y = −x + − x y = 的右下支于点 E 。 在线段 DE 上轨线自外向内。在Q(x, y) = 0 的右下支上轨线(由于 x& = y < ,0 y& = 0 )也自
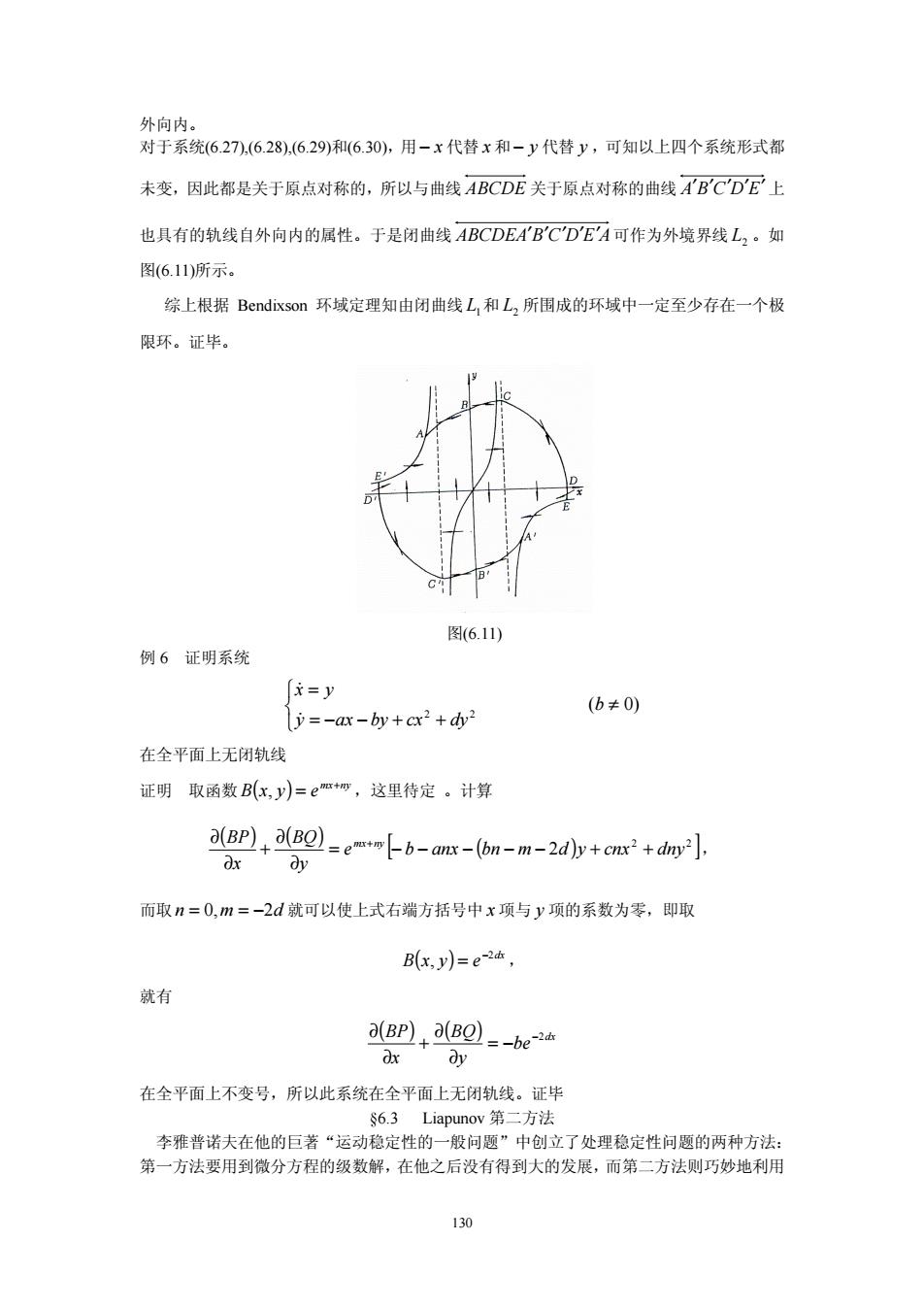
外向内 对于系统(627),(6.28).(6.29)和(6.30),用-x代替x和-y代替y,可知以上四个系统形式都 未变,因此都是关于原点对称的,所以与曲线ABCDE关于原点对称的曲线BCDE上 也具有的轨线自外向内的属性。于是闭曲线ABCDEA'B'C'D'E'A可作为外境界线L2。如 图(6.11)所示. 综上根据Bendixson环域定理知由闭曲线L,和L,所围成的环域中一定至少存在一个极 限环。证毕。 图(6.11) 例6证明系统 (i=y y=-ax-by+cx2+dy2 (b≠0) 在全平面上无闭轨线 证明取函数B(x,y)=em+心,这里待定。计算 d(BP)(BQ)=eb-anx-(bn-m-2d)y+c+dmy]. dx dy 而取n=0,m=-2d就可以使上式右端方括号中x项与y项的系数为零,即取 B(x,y)=eh, 就有 (BP)(BQ)=-be 在全平面上不变号,所以此系统在全平面上无闭轨线。证毕 S6.3 Liapunov第二方法 李雅普诺夫在他的巨著“运动稳定性的一般问题”中创立了处理稳定性问题的两种方法: 第一方法要用到微分方程的级数解,在他之后没有得到大的发展,而第二方法侧巧妙地利用 130
130 外向内。 对于系统(6.27),(6.28),(6.29)和(6.30),用− x 代替 x 和− y 代替 y ,可知以上四个系统形式都 未变,因此都是关于原点对称的,所以与曲线 ABCDE 关于原点对称的曲线 A′B′C′D′E′上 也具有的轨线自外向内的属性。于是闭曲线 ABCDEA′B′C′D′E′A可作为外境界线 L2 。如 图(6.11)所示。 综上根据 Bendixson 环域定理知由闭曲线 L1和 L2 所围成的环域中一定至少存在一个极 限环。证毕。 图(6.11) 例 6 证明系统 ( )0 2 2 ≠ = − − + + = b y ax by cx dy x y & & 在全平面上无闭轨线 证明 取函数 ( ) mx ny B x y e + , = ,这里待定 。计算 ( ) ( ) [ ( ) ] 2 2 e b anx bn m 2d y cnx dny y BQ x BP mx ny = − − − − − + + ∂ ∂ + ∂ ∂ + , 而取n = ,0 m = −2d 就可以使上式右端方括号中 x 项与 y 项的系数为零,即取 ( ) dx B x y e 2 , − = , 就有 ( ) ( ) dx be y BQ x BP −2 = − ∂ ∂ + ∂ ∂ 在全平面上不变号,所以此系统在全平面上无闭轨线。证毕 §6.3 Liapunov 第二方法 李雅普诺夫在他的巨著“运动稳定性的一般问题”中创立了处理稳定性问题的两种方法: 第一方法要用到微分方程的级数解,在他之后没有得到大的发展,而第二方法则巧妙地利用