
$6.4'一维系统和二维系统的分支简介 一维系统的分支问题 考虑一维一阶系统 东=动 (6.39) 其中1∈12SR为参数。假设fx,)对x,1至少具有二次连续可微,且fx,)=0的解 集在参数平面上为一条曲线或几条曲线(也可能退化为一点),记为S。此时S上点为系统 (6,39)的平衡解(平衡点),并称S的几何表示为系统(639)的分支图,分支图中曲线称为分 支曲线。 对于点几化入ES,者头)上0或者影C)20,则称点为正则点:否则路为修界 点。在S上,若当入通过∈I,时,相应于元的系统平衡点的个数或者稳定发生改变,则 称元=元,为系统(6.39)的分支值,并称分支曲线上对应于元=,的点为分支点。显然在临界 点处有f(x,)=(x。,)=f(x。,)=0,因此临界点是可疑分支点。进一步,若函 数fx,)在点P,)处的三个二阶偏导数A=f(x,B=x,)和 C=∫a(x。,)中有一个不等于零,则称P为初等临界点,否则称它为高阶临界点。下面 给出临界点的判别式,记 D=B2-AC. 若D>0,则称临界点P为重点:若D<0,则称临界点P为孤立临界点。显然重点 是分支点,而孤立临界点不是分支点。 对于P(x,)∈S,假设分支曲线表示成x=x(),若fx,x(2)》在x=x()处改变 符号,具体来说,当由大变小经过x=x()时,有f(x,x()从负(正)变正(负),则 称x=x()为系统(6.39)的稳定(不稳定)平衡解(或者点)。 最后,若分支曲线可以用x=x()或者元=x)表示,因此系统平衡点的稳定性指标 可定义为a(a)=f(x(a)或者x=(x,》 例如,由于f(x(,)=0或者f(x,(x)》=0,两边对1或者x求导数,即有 a+a=0度者k,+k,因=0,假设R为正 d dx 则点,即R满足/,)≠0.而在元=元处成者在x=k,处政变符号. di g
138 §6.4* 一维系统和二维系统的分支简介 一 一维系统的分支问题 考虑一维一阶系统 f ( ) x,λ dt dx = (6.39) 其中λ ∈ I λ ⊆ R 为参数。假设 f (x,λ)对 x,λ 至少具有二次连续可微,且 f (x,λ) = 0 的解 集在参数平面上为一条曲线或几条曲线(也可能退化为一点),记为 S 。此时 S 上点为系统 (6.39)的平衡解(平衡点),并称 S 的几何表示为系统(6.39)的分支图,分支图中曲线称为分 支曲线。 对于点 P (x )∈ S 0 0 0 ,λ ,若 ( ) 0 0 ≠ ∂ ∂ P x f 或者 ( ) 0 0 ≠ ∂ ∂ P f λ ,则称点为正则点;否则称为临界 点。在 S 上,若当λ 通过λ λ ∈ I 0 时,相应于λ 的系统平衡点的个数或者稳定发生改变,则 称λ = λ0 为系统(6.39)的分支值,并称分支曲线上对应于λ = λ0 的点为分支点。显然在临界 点处有 ( , ) ( , ) ( , ) 0 f x0 λ0 = f x ′ x0 λ0 = f λ ′ x0 λ0 = , 因此临界点是可疑分支点。进一步,若函 数 f (x,λ) 在 点 ( ) 0 0 0 P x ,λ 处 的 三 个 二 阶 偏 导 数 ( ) ( ) 0 0 0 0 A = f xx ′′ x ,λ , B = f x ′ λ ′ x ,λ 和 ( ) 0 0 C = f λλ ′′ x ,λ 中有一个不等于零,则称 P0 为初等临界点,否则称它为高阶临界点。下面 给出临界点的判别式,记 D = B − AC 2 。 若 D > 0 ,则称临界点 P0 为重点;若 D < 0,则称临界点 P0 为孤立临界点。显然重点 是分支点,而孤立临界点不是分支点。 对于∀ ∈ P x S ( ,λ ) ,假设分支曲线表示成 x = x(λ),若 f x x ( , ) (λ ) 在 x = x(λ)处改变 符号,具体来说,当 x x x 由大变小经过 = (λ ) 时,有 f x x ( , (λ ))从负 正 变正 ( ) (负) ,则 称 x = x(λ)为系统(6.39)的稳定(不稳定)平衡解(或者点)。 最后,若分支曲线可以用 x = x(λ)或者λ = λ(x) 表示,因此系统平衡点的稳定性指标 可定义为α(λ) f (x(λ),λ) x = ′ 或者 (x) f (x (x)) β = x ′ ,λ 。 例如,由于 f (x(λ),λ) = 0 或者 f x x ( , 0 λ ( )) = ,两边对 λ 或者 x 求导数,即有 ( ) ( ) ( ) ′ , + ′( ) ( ) λ ,λ = 0 λ λ λ λ λ f x d dx f x x 或者 ( ) ( ) ( ) ( ) ( ) ′ , + ′ , = 0 dx d x f x x f x x x λ λ λ λ 。假设 P0 为正 则点,即 P0 满足 ( , ) 0 f λ ′ x0 λ0 ≠ 。而 ( ) λ λ d dx 在λ = λ0 处或者 ( ) dx dλ x 在 0 x = x 处改变符号

则相应的a(入)或者x)也改变符号,此时系统(6.39)在点P。所在分支的平衡解在点P。的两 边的稳定性是不同的。因此称P,为转变点,此时点P,也为分支点。 例10试判别下列一维单参数微分方程的入的分支值 (1)求=元-x2 (2)元=x-x2 (3)=x-x3 (4)=1+3x-x3 解(1)记f(x,)=元-x2,令fx,)=0,有解x=士W,1eR,这条分支曲线记为S。 计算∫=-2x,f片=1,因此分支曲线上点点为正则点。并且当x从大变小穿过x=x()时, 观察∫的正负号可知当入之0时,平衡点x=√万稳定:当元>0时,平衡点x=-√万不稳 定。同时()=2√元在元=0处变号,于是P,0,0)为转变点,即分支点,=0为分 支值。如图6.13a)所示,称此类型分支点为鞍结点分支点 (2)记f(x,)=2x-x2,令fx,)=0,有解x=0和x=1,这两条分支曲线分别记 为S,和S2。计算f=1-2x,f片=x,∫:=-2,∫a=1,f=0。并且当x从大变小穿过 x=x()时,观察f的正负号可知:S,(x<0)和S2(x>0)为稳定平衡点:S,(x>0)和 S,(x<0)为不稳定平衡点。进一步,我们有 (a)当Px,)eS,时,即有x=0,∈R,易知f0,0)=f0.0)=f0,0)=0和 D0,0)=B2-AC=1>0,同时a()=1在1=0处变号.于是P,(0,0)为重点,当然也 是分支点,=0是分支值 b)当P(x,)ES,时,即有x=元,1∈R,易知(a)=-1在元=0处变号。于是P(0,0)为 重点,当然也是分支点,1=0是分支值 分支图如图(6.13b)所示,称此类型分支点为跨临界点分支点 (3)记fx,)=x-x3,令fx,)=0,有解x=0,x=±万,这两分支曲线分别记为 S,和S2。计算有f=-3x2,f片=x,f孤=-6x,fa=1,fa=0。并且当x从大变小穿 139
139 则相应的α(λ)或者 β(x) 也改变符号,此时系统(6.39)在点 P0 所在分支的平衡解在点 P0 的两 边的稳定性是不同的。因此称 P0 为转变点,此时点 P0 也为分支点。 例 10 试判别下列一维单参数微分方程的λ 的分支值 (1) 2 x& = λ − x (2) 2 x& = λx − x (3) 3 x& = λx − x (4) 3 x& = λ + 3x − x 解 (1)记 ( , ) , ( , ) 0 2 f x λ = λ − x 令f x λ = ,有解 = ± ∈ R+ x λ ,λ ,这条分支曲线记为 S 。 计算 ′ = −2 , ′ = 1 λ f x f x ,因此分支曲线上点点为正则点。并且当 x 从大变小穿过 x = x(λ)时, 观察 f 的正负号可知当λ ≥ 0时,平衡点 x = λ 稳定;当λ > 0 时,平衡点 x = − λ 不稳 定。同时α(λ) = m2 λ 在 λ = 0 处变号,于是 ( 0,0 ) P0 为转变点,即分支点, 0 λ0 = 为分 支值。如图(6.13a)所示,称此类型分支点为鞍结点分支点 (2)记 ( ) 2 f x,λ = λx − x ,令 f (x,λ) = 0 ,有解 x = 0和 x = λ ,这两条分支曲线分别记 为 S1和 S2 。计算 ′ = − 2 , ′ = , ′′ = − ,2 ′′ = ,1 ′′ = 0 λ λ λ λλ f x f x f f f x xx x 。并且当 x 从大变小穿过 x = x(λ)时,观察 f 的正负号可知: ( 0) S1 x < 和 ( 0) S2 x > 为稳定平衡点; ( 0) S1 x > 和 ( 0) S2 x < 为不稳定平衡点。进一步,我们有 (a) 当 ( ) 1 P x,λ ∈ S 时 , 即 有 x = ,0 λ ∈ R , 易 知 ( 0,0 ) = ′( 0,0 ) = ′( 0,0 ) = 0 λ f f f x 和 ( 0,0 ) 1 0 2 D = B − AC = > ,同时α(λ) = λ 在λ = 0 处变号。于是 ( 0,0 ) P0 为重点,当然也 是分支点, 0 λ0 = 是分支值. (b)当 ( ) 2 P x,λ ∈ S 时,即有 x = λ,λ ∈ R ,易知α(λ) = −λ 在λ = 0 处变号。于是 ( 0,0 ) P0 为 重点,当然也是分支点, 0 λ0 = 是分支值. 分支图如图(6.13b)所示,称此类型分支点为跨临界点分支点 (3)记 ( ) 3 f x,λ = λx − x ,令 f (x,λ) = 0 ,有解 x = ,0 x = ± λ ,这两分支曲线分别记为 S1和 S2 。计算有 3 , , 6 , ,1 0 2 f x ′ = λ − x f λ ′ = x f xx ′′ = − x f xλ ′′ = f λλ ′′ = 。并且当 x 从大变小穿

过x=x)时,观察f的正负号可知:S(x<0)和S,(x>0)为稳定的平衡解:S,(x>0) 为不稳定的平衡解。 (a)当Px)eS时,记x=0,1eR,易知f0,0)=f0,0)=f0,0)=0。同时 (a)=元在1=0处变号,且D0,0)=1>0,则P(0,0)为重点,当然为分支点。 b)当Px,)eS,时,即x=±√瓦,eR,此时a()=-2元在元=0处变号,所以P0,0) 为分支点。分支图如图(6.13C)所示,称此类型分支点为叉式分支点。 (4)记f(x,)=元+3x-x3,令fx,)=0,有解1=x3-3x,记这支分支曲线为S。 计算f=3-3x2,片=1,∫=6x∫=0,f:=0,并且当x从大变小穿过x=x(a) 时,观察f的正负号可知:S(x>)和Sx<-)为稳定平衡解:S(-1<x<1)为不稳定平 衡解。同时x)=(x,x》=3-3x2在x=±1处变号,所以P(仁-1,2)和P,-2)为分 支点,1=2为分支值,分支图如图(6.13d)所示,称此类型分支点为复合分支点。 (a)鞍结点分支 (b)跨临界分支 (c)叉式分支 (d)复合分支 图(6.13) 二维系统的分支问题 考虑二维一阶系统 =f,y dt (6.40) =gxy刀 d 140
140 过 x = x(λ)时,观察 f 的正负号可知: ( 0) S1 x < 和 ( 0) S2 x > 为稳定的平衡解; ( 0) S1 x > 为不稳定的平衡解。 (a) 当 ( ) 1 P x,λ ∈ S 时,记 x = ,0 λ ∈ R ,易知 ( 0,0 ) = ′( 0,0 ) = ′( 0,0 ) = 0 λ f f f x 。同时 α(λ) = λ 在λ = 0 处变号,且 D( 0,0 ) = 1 > 0 ,则 ( 0,0 ) P0 为重点,当然为分支点。 (b)当 ( ) 2 P x,λ ∈ S 时,即 = ± ∈ R+ x λ ,λ ,此时α(λ) = −2λ 在λ = 0 处变号,所以 P( 0,0 ) 为分支点。分支图如图(6.13c)所示,称此类型分支点为叉式分支点。 (4)记 ( ) 3 f x,λ = λ + 3x − x ,令 f (x,λ) = 0 ,有解 x 3x 3 λ = − ,记这支分支曲线为 S 。 计算 3 3 , ,1 6 , ,0 0 2 f x ′ = − x f λ ′ = f xx ′′ = − x f xλ ′′ = f λλ ′′ = ,并且当 x 从大变小穿过 x = x(λ) 时,观察 f 的正负号可知:S(x > 1)和 S(x < −1)为稳定平衡解;S(−1 < x < 1)为不稳定平 衡解。同时 ( ) ( ( )) 2 x f x, x 3 3x β = x ′ λ = − 在 x = ±1处变号,所以 ( 2,1 ) P1 − 和 ( ,1 2) P2 − 为分 支点,λ = ±2为分支值,分支图如图(6.13d)所示,称此类型分支点为复合分支点。 (a)鞍结点分支 (b)跨临界分支 (c)叉式分支 (d)复合分支 图(6.13) 二. 二维系统的分支问题 考虑二维一阶系统 ( ) ( ) = = λ λ , , , , g x y dt dy f x y dt dx (6.40)
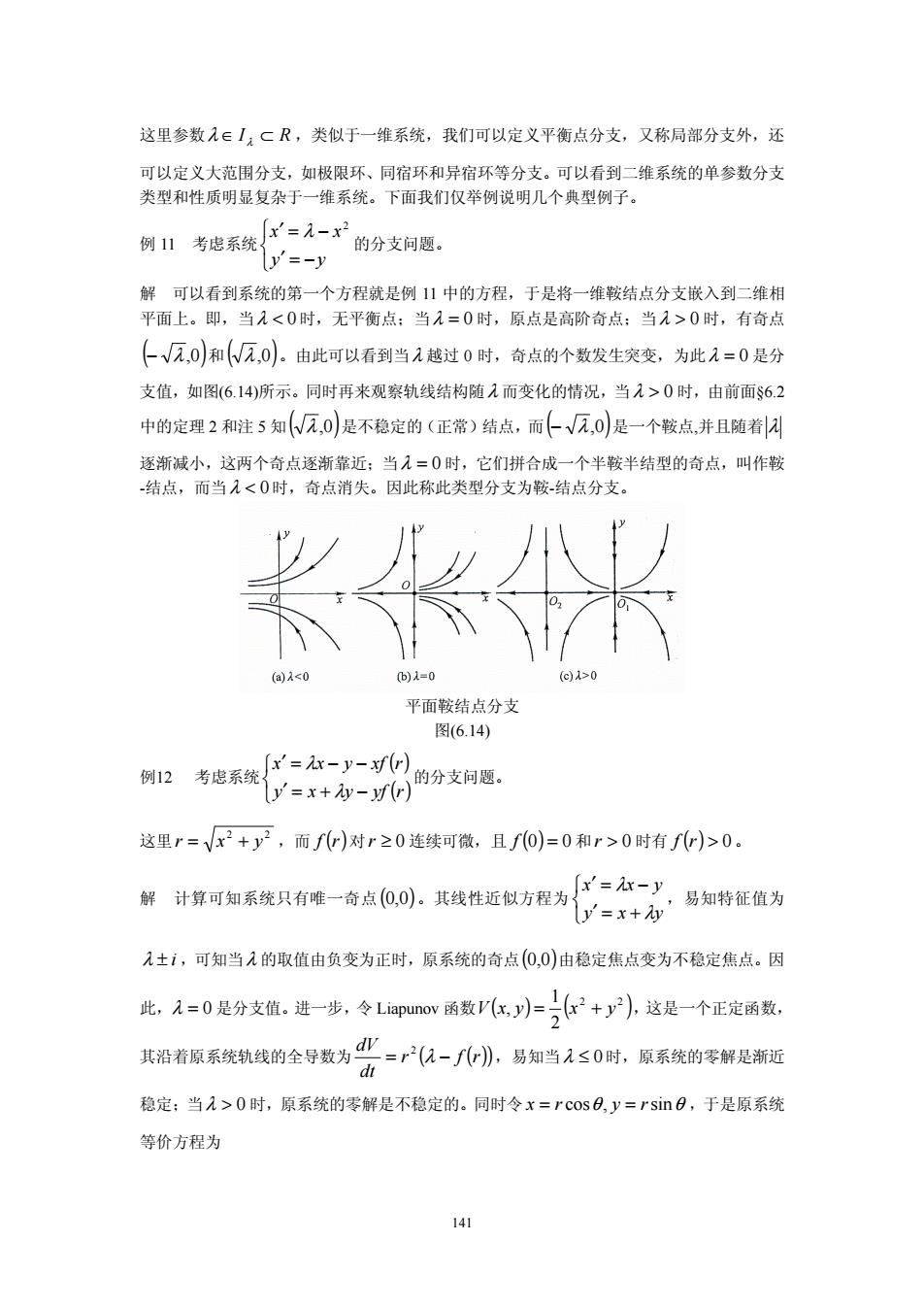
这里参数元EI,CR,类似于一维系统,我们可以定义平衡点分支,又称局部分支外,还 可以定义大范围分支,如极限环、同宿环和异宿环等分支。可以看到二维系统的单参数分支 类型和性质明显复杂于一维系统。下面我们仅举例说明几个典型例子。 例1考能系统-产的分支向愿 y'=-y 解可以看到系统的第一个方程就是制11中的方程,于是将一维鞍结占分支嵌入到一维相 平面上。即,当<0时,无平衡点:当1=0时,原点是高阶奇点:当>0时,有奇点 (仁√几,0)和W瓦,0。由此可以看到当元越过0时,奇点的个数发生突变,为此1=0是分 支值,如图(6.14)所示。同时再来观察轨线结构随入而变化的情况,当1>0时,由前面$6.2 中的定理2和注5知(√元,0)是不稳定的(正常)结点,而(√,0是一个鞍点,并且随着个 逐渐减小,这两个奇点逐渐靠近:当=0时,它们拼合成一个半鞍半结型的奇点,叫作鞍 结点,而当1<0时,奇点消失。因此称此类型分支为鞍-结点分支。 b)1=0 平面鞍结点分支 图(6.14) 2考定系线江V的分支有愿。 y=x+ly-xf(r) 这里r=√2+y2,而f心)对r≥0连续可微,且0)=0和r>0时有f心)>0. 解计算可知系统只有唯一奇点@0)。其线性近似方程为?x-), 气UY=x+易知特征值为 入土i,可知当入的取值由负变为正时,原系统的奇点(0,0)由稳定焦点变为不稳定焦点。因 此,入=0是分支值。进一步,令Liapunov函数V(k,y)=,(k2+y2),这是一个正定函数, 其沿着原系统线的全号数为货-化-儿.易知当天三0叶,原系统的零都是务额 稳定:当>0时,原系统的零解是不稳定的。同时令x=rcos日,y=rsin0,于是原系统 等价方程为 141
141 这里参数λ ∈ I λ ⊂ R ,类似于一维系统,我们可以定义平衡点分支,又称局部分支外,还 可以定义大范围分支,如极限环、同宿环和异宿环等分支。可以看到二维系统的单参数分支 类型和性质明显复杂于一维系统。下面我们仅举例说明几个典型例子。 例 11 考虑系统 ′ = − ′ = − y y x x 2 λ 的分支问题。 解 可以看到系统的第一个方程就是例 11 中的方程,于是将一维鞍结点分支嵌入到二维相 平面上。即,当λ < 0时,无平衡点;当λ = 0 时,原点是高阶奇点;当λ > 0 时,有奇点 (− λ 0, )和( λ 0, )。由此可以看到当λ 越过 0 时,奇点的个数发生突变,为此λ = 0 是分 支值,如图(6.14)所示。同时再来观察轨线结构随λ 而变化的情况,当λ > 0 时,由前面§6.2 中的定理 2 和注 5 知( λ 0, )是不稳定的(正常)结点,而(− λ 0, )是一个鞍点,并且随着 λ 逐渐减小,这两个奇点逐渐靠近;当λ = 0 时,它们拼合成一个半鞍半结型的奇点,叫作鞍 -结点,而当λ < 0时,奇点消失。因此称此类型分支为鞍-结点分支。 平面鞍结点分支 图(6.14) 例12 考虑系统 ( ) ( ) ′ = + − ′ = − − y x y yf r x x y xf r λ λ 的分支问题。 这里 2 2 r = x + y ,而 f (r)对 r ≥ 0 连续可微,且 f (0) = 0 和 r > 0 时有 f (r) > 0。 解 计算可知系统只有唯一奇点 ( 0,0 )。其线性近似方程为 ′ = + ′ = − y x y x x y λ λ ,易知特征值为 λ ± i ,可知当λ 的取值由负变为正时,原系统的奇点( 0,0 )由稳定焦点变为不稳定焦点。因 此,λ = 0 是分支值。进一步,令 Liapunov 函数 ( ) ( ) 2 2 2 1 V x, y = x + y ,这是一个正定函数, 其沿着原系统轨线的全导数为 r ( ) f ( )r dt dV = λ − 2 ,易知当λ ≤ 0时,原系统的零解是渐近 稳定;当λ > 0 时,原系统的零解是不稳定的。同时令 x = r cosθ, y = rsinθ ,于是原系统 等价方程为
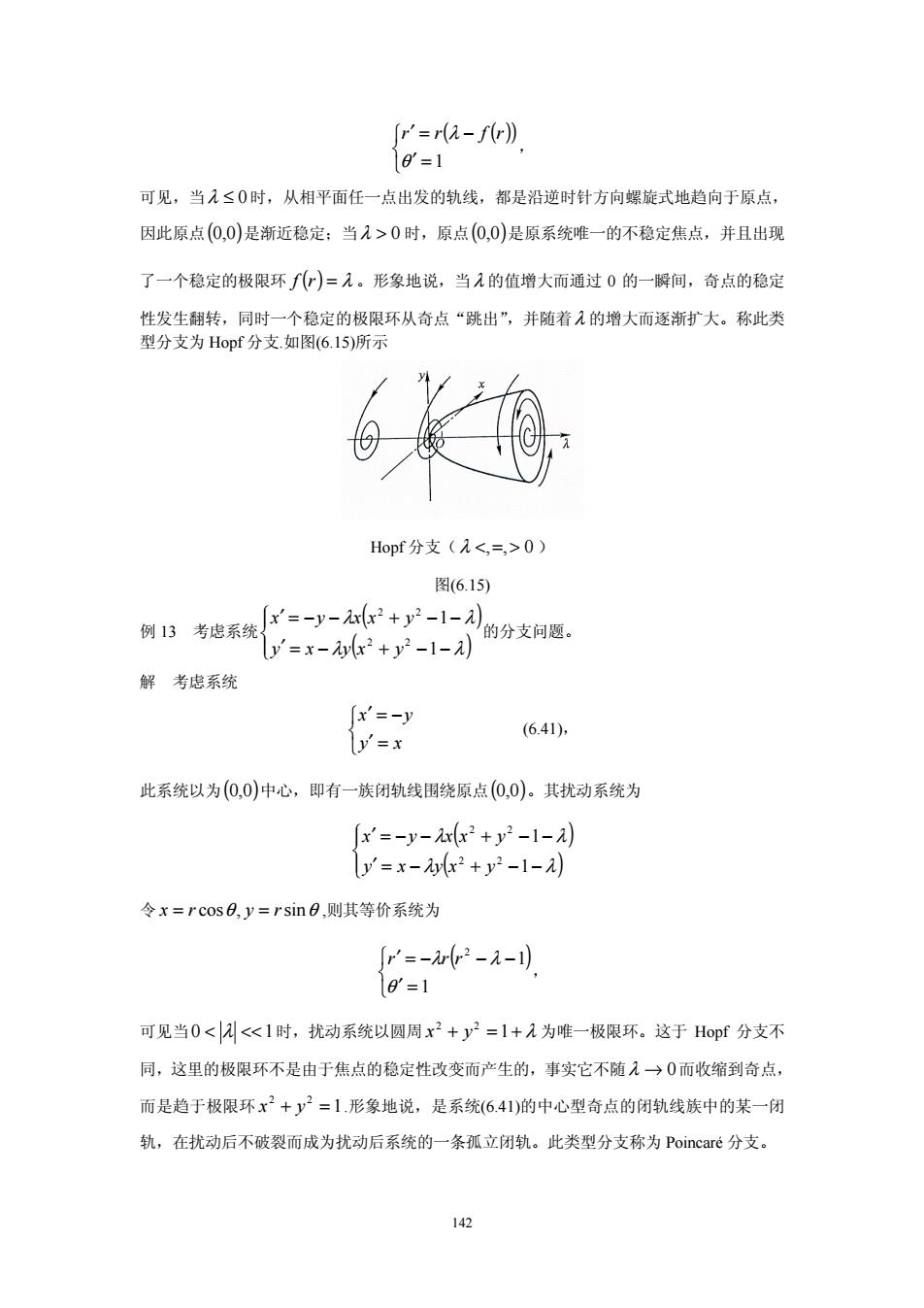
∫r'=a-fr》 18=1 可见,当入≤0时,从相平面任一点出发的轨线,都是沿逆时针方向螺旋式地趋向于原点, 因此原点(0,0)是渐近稳定:当入>0时,原点(0,0)是原系统唯一的不稳定焦点,并且出现 了一个稳定的极限环(~)=入。形象地说,当1的值增大而通过0的一解间,奇点的稳定 性发生翻转,同时一个稳定的极限环从奇点“跳出”,并随入的增大而逐渐扩大。称此类 型分支为Hopf分支如图(6.15)所示 Hopf分支(A<,=,>0) 图(6.15) 5考袋系线少-+小的分支间题 y=x-(2+y2-1- 解考虑系统 (x=-y Iy=x (6.41), 此系统以为(0,0)中心,即有一族闭轨线围绕原点(0,0)。其扰动系统为 x'=-y-x(2+y2-1- y'=x-x2+y2-1- 令x=rcos 6,y=rsin日,则其等价系统为 ∫r'=-r2- 8=1 可见当0<入<1时,扰动系统以圆周x2+y2=1+1为唯一极限环。这于Hopf分支不 同,这里的极限环不是由于焦点的稳定性改变而产生的,事实它不随入→0而收缩到奇点, 而是趋于极限环x2+y2=1形象地说,是系统(6,41)的中心型奇点的闭轨线族中的某一闭 轨,在扰动后不破裂而成为扰动后系统的一条孤立闭轨。此类型分支称为Poincare心分支。 电
142 ( ( )) ′ = ′ = − θ 1 r r λ f r , 可见,当λ ≤ 0时,从相平面任一点出发的轨线,都是沿逆时针方向螺旋式地趋向于原点, 因此原点( 0,0 )是渐近稳定;当λ > 0 时,原点( 0,0 )是原系统唯一的不稳定焦点,并且出现 了一个稳定的极限环 f (r) = λ 。形象地说,当λ 的值增大而通过 0 的一瞬间,奇点的稳定 性发生翻转,同时一个稳定的极限环从奇点“跳出”,并随着λ 的增大而逐渐扩大。称此类 型分支为 Hopf 分支.如图(6.15)所示 Hopf 分支(λ <,=,> 0 ) 图(6.15) 例 13 考虑系统 ( ) ( ) ′ = − + − − ′ = − − + − − λ λ λ λ 1 1 2 2 2 2 y x y x y x y x x y 的分支问题。 解 考虑系统 ′ = ′ = − y x x y (6.41), 此系统以为( 0,0 )中心,即有一族闭轨线围绕原点( 0,0 )。其扰动系统为 ( ) ( ) ′ = − + − − ′ = − − + − − λ λ λ λ 1 1 2 2 2 2 y x y x y x y x x y 令 x = r cosθ, y = rsinθ ,则其等价系统为 ( ) ′ = ′ = − − − 1 1 2 θ r λr r λ , 可见当0 < λ << 1时,扰动系统以圆周 + = 1+ λ 2 2 x y 为唯一极限环。这于 Hopf 分支不 同,这里的极限环不是由于焦点的稳定性改变而产生的,事实它不随λ → 0而收缩到奇点, 而是趋于极限环 1 2 2 x + y = .形象地说,是系统(6.41)的中心型奇点的闭轨线族中的某一闭 轨,在扰动后不破裂而成为扰动后系统的一条孤立闭轨。此类型分支称为 Poincaré 分支