第七节 第九章 方向导数写梯袁 、 方向导数 二、梯度 三、方向导数与梯度的关系 HIGH EDUCATION PRESS 机动目录上页下页返回结束
第九章 第七节 一、方向导数 机动 目录 上页 下页 返回 结束 二、梯度 三、方向导数与梯度的关系 方向导数与梯度
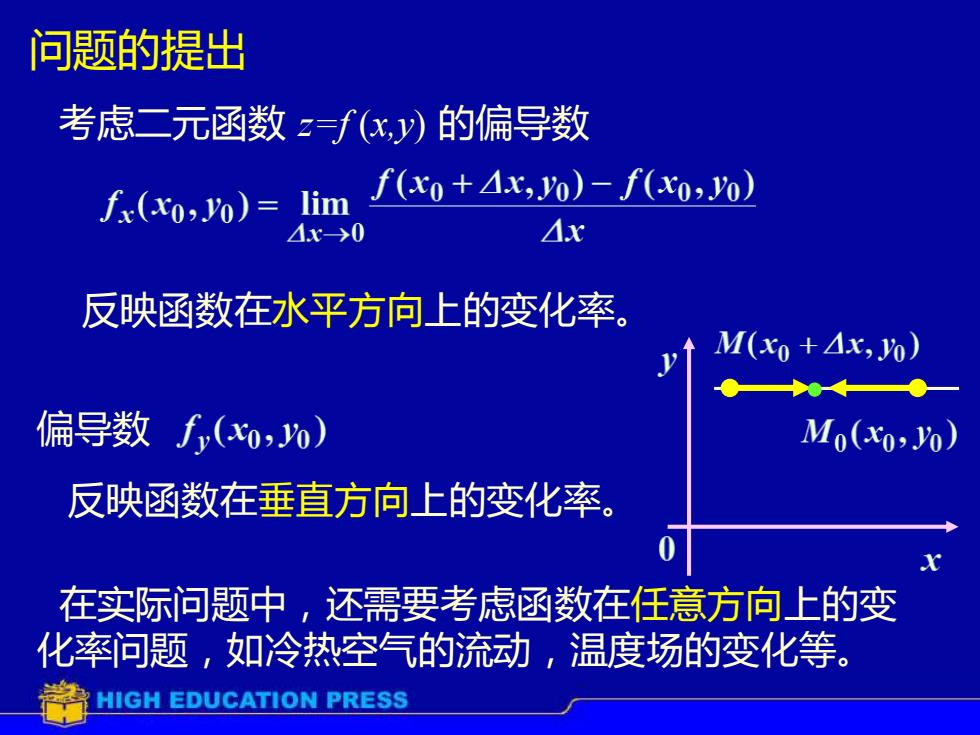
问题的提出 考虑二元函数f(x,y)的偏导数 (xo2o)=lim f(x0+Ax,0)-f(x0,y0) Ax→0 △x 反映函数在水平方向上的变化率。 M(xo+△x,Jo) ◆←◆ 偏导数f(x0,0) Mo(xo-Yo) 反映函数在垂直方向上的变化率。 在实际问题中,还需要考虑函数在任意方向上的变 化率问题,如冷热空气的流动,温度场的变化等。 等HIGH EDUCATION PRESS
问题的提出 考虑二元函数 z=f (x,y) 的偏导数 反映函数在水平方向上的变化率。 偏导数 反映函数在垂直方向上的变化率。 在实际问题中,还需要考虑函数在任意方向上的变 化率问题,如冷热空气的流动,温度场的变化等。•
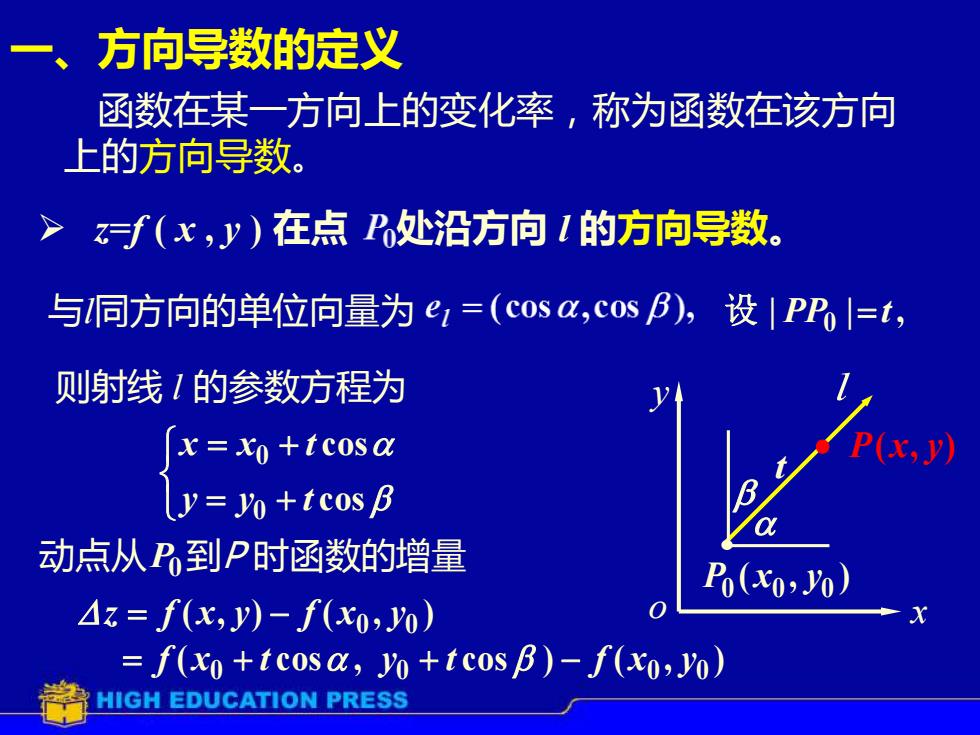
方向导数的定义 函数在某一方向上的变化率,称为函数在该方向 上的方向导数。 f(x,y)在点处沿方向1的方向导数。 与同方向的单位向量为e1=(cosa,cs),设|PR|=t, 则射线1的参数方程为 x=x+tcosa (x,y ly yo +tcos B 动点从P到P时函数的增量 P(x0,y0) △=f(x,Jy)-f(x0,0) f(xo+tcosa,yo+tcosB)-f(xo,yo) HIGH EDUCATION PRESS
一、方向导数的定义 o y x l • 函数在某一方向上的变化率,称为函数在该方向 上的方向导数。 与l同方向的单位向量为 则射线 l 的参数方程为 | | , 0 设 PP = t • P( x, y) t ( , ) 0 0 0 P x y = + = + cos cos 0 0 y y t x x t 动点从 P0 到P 时函数的增量 ( , ) ( , ) 0 0 z = f x y − f x y ( cos , cos ) ( , ) 0 0 0 0 = f x + t y + t − f x y ➢ z=f ( x , y ) 在点 处沿方向 l 的方向导数
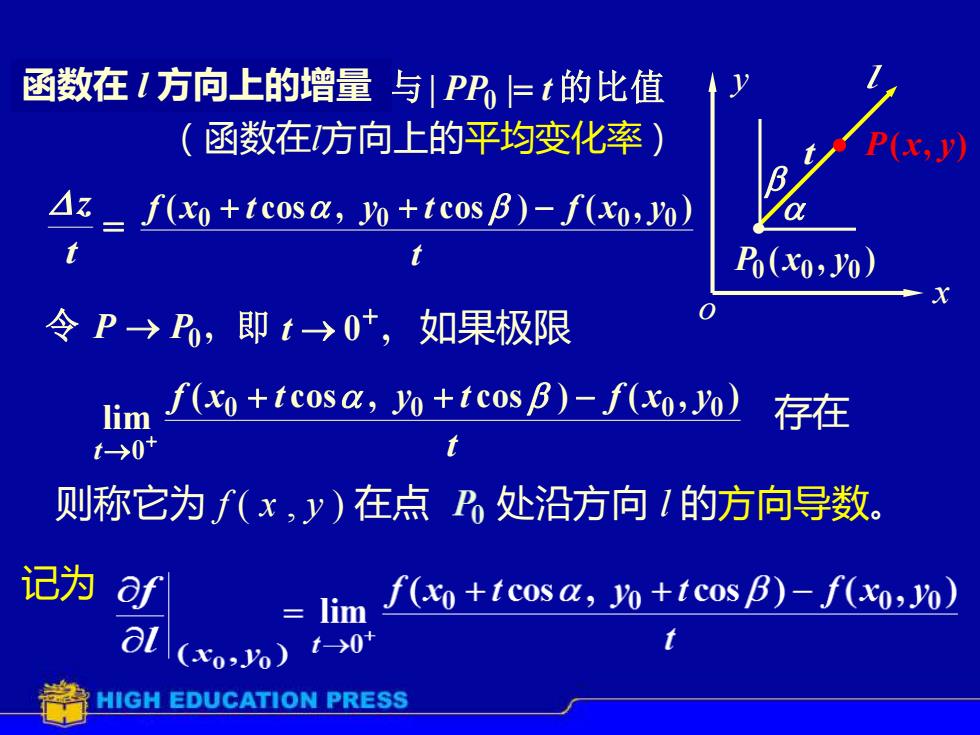
函数在I方向上的增量与PP,=t的比值 (函数在方向上的平均变化率) P(x,y f(xo+tcosa,yo+tcosB)-f(xo,yo) t P6(x0,Jy0) 令P→,即t→0*,如果极限 lim f(xo+tcosa,yo+tcosB)-f(xo,Yo) 存在 t-→0+ t 则称它为f(x,y)在点处沿方向1的方向导数。 记为af lim f(xo+tcosa,o+tcosB)-f(xo,Yo) (x0%)t→0* t HIGH EDUCATION PRESS
函数在 l 方向上的增量 它与| PP0 |= t 的比值 = t z (函数在l方向上的平均变化率) 如果极限 存在 t f ( x t cos , y t cos ) f ( x , y ) 0 + 0 + − 0 0 , 令 P → P0 0 , → + 即 t t f x t y t f x y t ( cos , cos ) ( , ) lim 0 0 0 0 0 + + − → + o y x l • • P( x, y) t ( , ) 0 0 0 P x y 则称它为 f ( x , y ) 在点 处沿方向 l 的方向导数。 记为
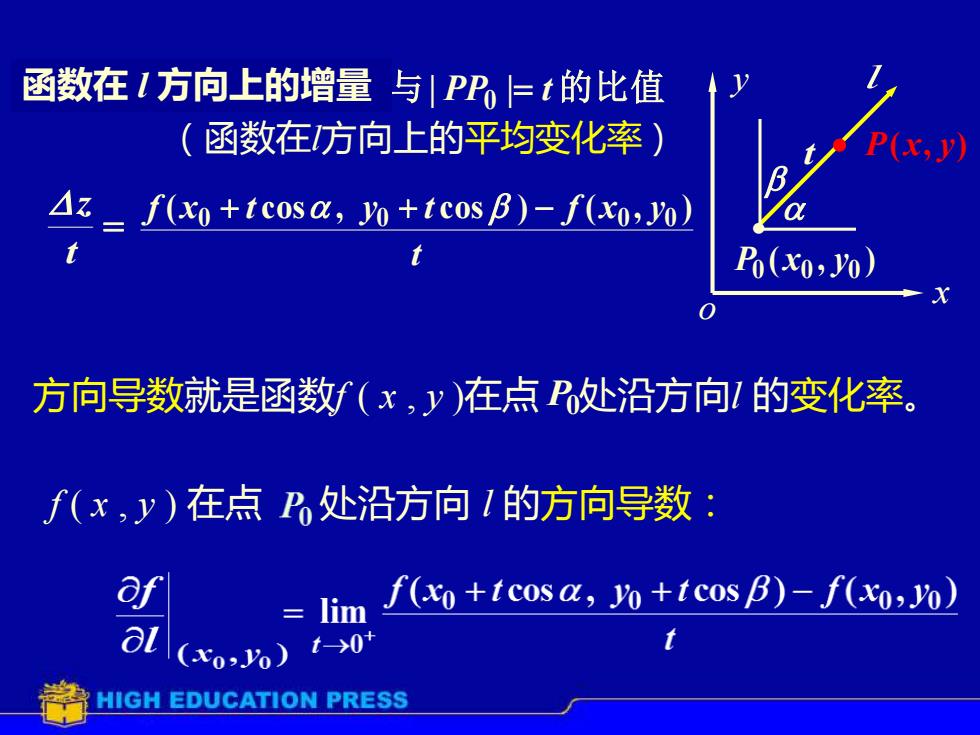
函数在1方向上的增量与|PP=t的比值 (函数在方向上的平均变化率) △z f(xo+tcosa,yo+tcosB)-f(xo,Yo) 6(x0,J0 方向导数就是函数f(x,y)在点处沿方向1的变化率。 f(x,y)在点P处沿方向1的方向导数: lim f(xo+tcosa,o+tcos B)-f(xo,yo) al (xo>Yo)t0* HIGH EDUCATION PRESS
函数在 l 方向上的增量 它与| PP0 |= t 的比值 = t z (函数在l方向上的平均变化率) t f ( x t cos , y t cos ) f ( x , y ) 0 + 0 + − 0 0 o y x l • • P( x, y) t ( , ) 0 0 0 P x y f ( x , y ) 在点 处沿方向 l 的方向导数: 方向导数就是函数f ( x , y )在点 P0 处沿方向l 的变化率