
第三节条件分布 一、离散型随机变量的条件分布 二、连续型随机变量的条件分布
一、离散型随机变量的条件分布 二、连续型随机变量的条件分布 第三节 条件分布

一、离散型随机变量的条件分布 —一条件分布律 定义设二维随机变量(X,Y)的联合分布律为 P(X=x,Y=y)=pi,i,j=1,2, 对固定的j,若P{Y=y}>0,则 PX-XY-M-PEXY P(Y=y} (i=1,2,) 称为在Y=y的条件下X的条件分布律. 对固定的i,若P{X=x}>0,则 Pw=X=-》-A P(X=x (j=1,2,) 称为在X=x的条件下Y的条件分布律
一、离散型随机变量的条件分布 ——条件分布律 定义 设二维随机变量( , ) X Y 的联合分布律为 { , } , , 1,2, P X x Y y p i j = = = = i j ij 0 j 对固定的 j P Y y ,若 = ,则 0 i 对固定的i P X x ,若 = ,则 . 称为在Y y X = j的条件下 的条件分布律 . 称为在X x Y = i的条件下 的条件分布律 { } P X x Y y = = i j ij j p p• = ( 1,2, ) i = { } P Y y X x = = j i ij i p p • = ( 1,2, ) j = { , } { } i j j P X x Y y P Y y = = = = { , } { } i j i P X x Y y P X x = = = =
PX-xY-)-P (i=1,2,) .j 即 W=X=}- (j=1,2 Pi 条件概率的性质:10P{X=xY=≥0; 2°∑PX=x1Y=y,}=1 例1在一汽车工厂中,一辆汽车有两道工序是由机器人完成的. 其一是紧固三只螺栓,其二是焊接2处焊点.以X表示机器人紧固 的螺栓坚固得不良的数目,以Y表示由机器人焊接的不良焊点的 数目.据积累的资料知(X,)的分布律如下:
即 条件概率的性质: 1 0 P{ X= xi |Y= yj }0; ij i p p • = { } P X x Y y = = i j { } P Y y X x = = j i ij j p p• = ( 1,2, ) j = ( 1,2, ) i = 0 1 2 { | } 1 i j i P X x Y y = = = = 例1 在一汽车工厂中,一辆汽车有两道工序是由机器人完成的. 其一是紧固三只螺栓,其二是焊接2处焊点. 以X表示机器人紧固 的螺栓坚固得不良的数目,以Y表示由机器人焊接的不良焊点的 数目. 据积累的资料知(X,Y)的分布律如下:
0 111 2 3 PV=》 L10 -0.840.10-030-0.020_0010 -0,900- 0.900 1 0.060 10.010 0.008 0.002 0.080 2 0.01010.005↓ 0.004 0.001 0.020 P{X=} 0.910 10.04510.032 0.013 求(1)在X-1的条件下,Y的条件分布律. (2)在Y=0的条件下,X的条件分布律. 解 (①)PW=0x-y=PX=1,y=0 0.030 P{X=1} 0.045 3 POY=1X=1)=P(X=LY=1_ .010_ P{X=1} .045 9 PW=2x=1}-PX=1Y=2= 0.005= P{X=1 0.045 9
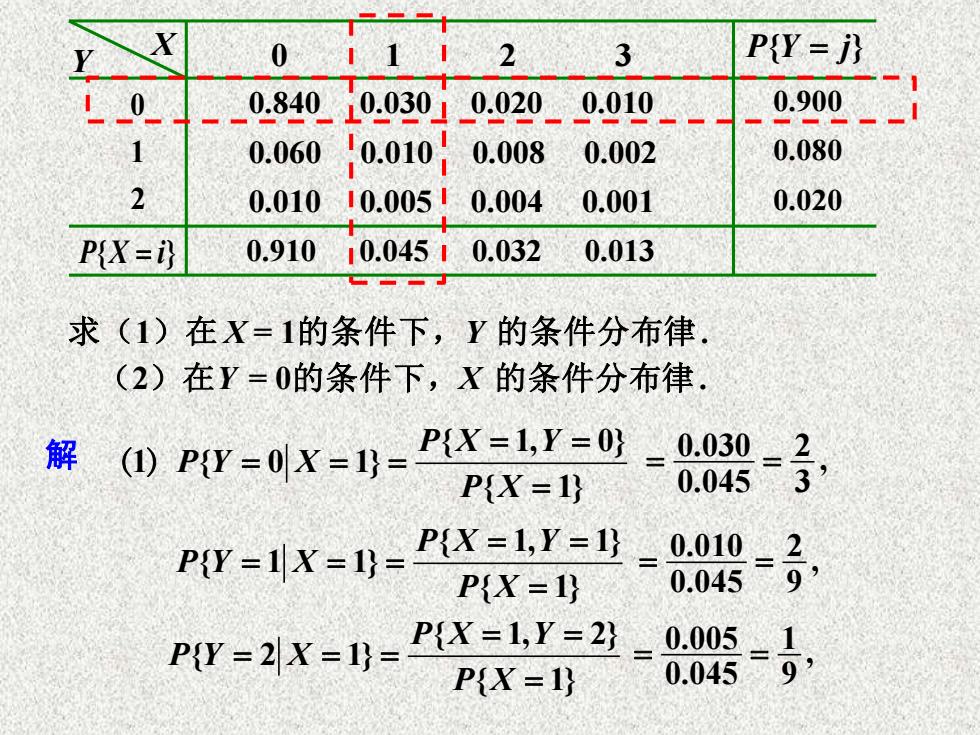
X Y 0 1 2 3 0.840 0.030 0.020 0.010 0.060 0.010 0.008 0.002 0.010 0.005 0.004 0.001 0 1 2 0.900 0.080 0.020 P X i { } = 0.910 0.045 0.032 0.013 P Y j { } = 解 求(1)在 X = 1的条件下,Y 的条件分布律. (2)在Y = 0的条件下,X 的条件分布律. { 1, 0} 1 { 0 1} { 1} P X Y P Y X P X = = = = = = ( ) 0.030 2 , 0.045 3 = = { 1, 1} { 1 1} { 1} P X Y P Y X P X = = = = = = 0.010 2 , 0.045 9 = = { 1, 2} { 2 1} { 1} P X Y P Y X P X = = = = = = 0.005 1 , 0.045 9 = =

即在X=1的条件下,Y的条件分布律为 Y=k 012 P(Y=kX=1) (2)同理可得,在Y=0的条件下,X的条件分布律. X=k 0 12 3 P(X=k Y=0) 别品 90 90
Y k = P Y k X { 1} = = 0 1 2 2 2 1 399 即在 X Y = 1 , 的条件下 的条件分布律为 (2)同理可得,在Y=0的条件下,X的条件分布律 . X k = P X k Y { 0} = = 0 1 2 3 84 3 2 1 90 90 90 90