第7章在力学机械中的应用
第7章 在力学机械中的应用
7.1理论力学 例7-1-1任意平面力系的简化 ·本程序可用来对任意多个力组成的平面力 系作简化,得出一个合力,分成两步做: ·第一步:向任意给定点p0简化,得到一个 主向量和一个主矩; ·第二步,将此主矩和主向量转换成一个合 力。程序如下:
7-1 理论力学 例7-1-1 任意平面力系的简化 • 本程序可用来对任意多个力组成的平面力 系作简化,得出一个合力,分成两步做: • 第一步:向任意给定点p0简化,得到一个 主向量和一个主矩; • 第二步,将此主矩和主向量转换成一个合 力。程序如下:

程序exn711 clear,N=inpute('输入力的数目N=)%输入力系的数据 for i=1:N i,f,:)=input((力f0)的x,y两个分量fx(0),fy(0]=): p(i,:)=input('力f0的一个作用点的坐标p()=[px,py]="); end p0=input('简化转移点p0的坐标p0=[p0x,pOy]=): ft=sum(f), %求主向量 for i=1:N %计算各力对p0点的力矩 m(0)=fi,2)*(p(i,1)-p0(1)-f0,1)*(p(i,2)-p0(2); end mt=sum(m) %相加求主矩 pt=mt/[ft(2);-ft(1)】+p0 %求合力作用点的坐标
程序exn711 clear, N=input('输入力的数目N=') %输入力系的数据 for i=1:N i, f(i,:)=input('力f(i)的x,y两个分量[fx(i),fy(i) ] = '); p(i,:)=input('力f(i)的一个作用点的坐标p(i)= [px,py ] = '); end p0=input('简化转移点p0的坐标p0= [p0x,p0y ] = '); ft=sum(f), % 求主向量 for i=1:N %计算各力对p0点的力矩 m(i)=f(i,2)*(p(i,1)-p0(1))-f(i,1)*(p(i,2)-p0(2)); end mt=sum(m) % 相加求主矩 pt = mt/ [ft(2);-ft(1)] + p0 % 求合力作用点的坐标
程序exn711运行结果 ·最后一行程序是基于下列求合力作用点坐标 [pt(1),pt(2)]的方程: t(2)*(p0(1)-pt(1)-ft(1)*(p0(2)-pt(2)+mt=0 可写成(pt-p0)*[t(2);-t(1)】=-mt,再转成程序中的 p0表达式。由于是一个方程求两个未知数,这是 一个不定方程,用矩阵右除的方法将给出无数个 解中之一,即ptp0中有一个分量是零。 。 运行此程序,设N=3,f(1)=[2,3],p(1)=[-1,0],f(2) =[4,7],p(2)=[1,-2],f3)=[3,-4],p(3)=[1,2],又设 简化点的坐标p0=【-1,-1],答案为: 。ft=[161,mt=-9,pt=[-2.5000-1.00001
程序exn711运行结果 • 最后一行程序是基于下列求合力作用点坐标 [pt(1),pt(2)]的方程: ft(2)*(p0(1)-pt(1))- ft(1)*(p0(2)-pt(2)) + mt =0 可写成(pt-p0)* [ft(2); -ft(1)] = -mt, 再转成程序中的 p0表达式。由于是一个方程求两个未知数,这是 一个不定方程,用矩阵右除的方法将给出无数个 解中之一,即pt-p0中有一个分量是零。 • 运行此程序,设N=3,f(1)= [2,3],p(1) = [-1,0], f(2) = [-4,7],p(2)= [1,-2],f(3) = [3,-4], p(3)= [1,2],又设 简化点的坐标p0= [-1,-1],答案为: • ft =[ 1 6 ], mt = -9, pt =[ -2.5000 -1.0000]
例7-1-2双杆平衡方程 ·图7-1-1所示杆系,设已知:G1=200;G2=100;L1=2; L2=sqrt(2);theta1=30*pi/180;theta2=45*pi/180;求其支 撑反力Na,Nb,Nc。 ·解:◆画出杆1和杆2的分离体图,列出方程如下: 02N 图7.7两杆系统的受力图(左)和分离体受力图(右)
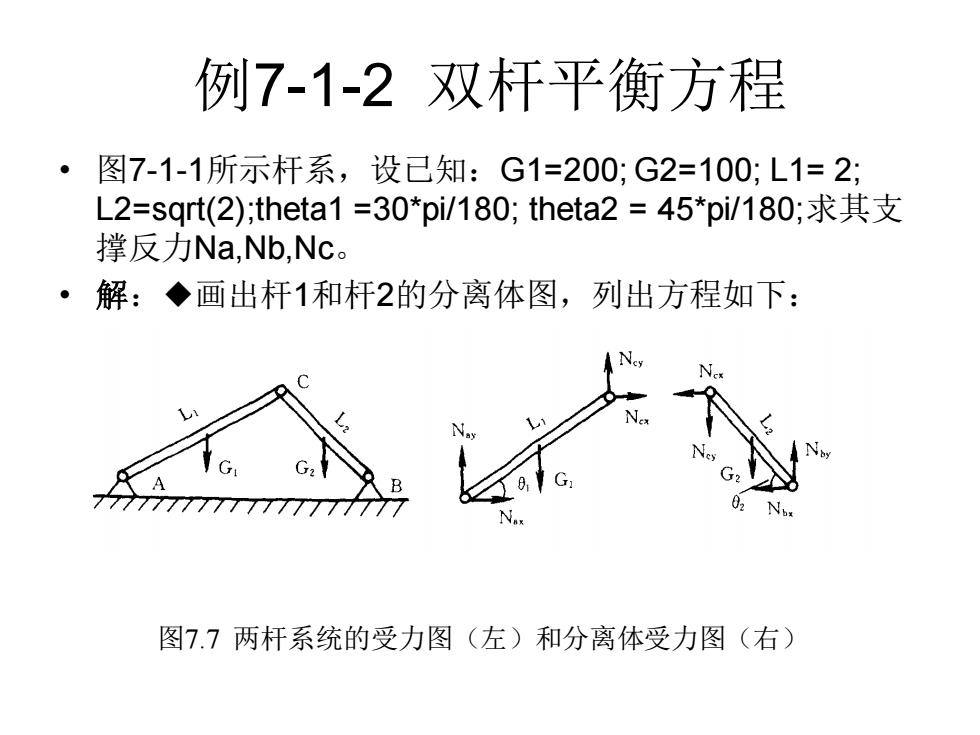
例7-1-2 双杆平衡方程 • 图7-1-1所示杆系,设已知:G1=200; G2=100; L1= 2; L2=sqrt(2);theta1 =30*pi/180; theta2 = 45*pi/180;求其支 撑反力Na,Nb,Nc。 • 解:◆画出杆1和杆2的分离体图,列出方程如下: 图7.7 两杆系统的受力图(左)和分离体受力图(右)