1.1弹性力学平面问题 其中X,Y分别为体力沿x,y方向的分量。∫为体力向量,即 1=-xY ②)几何方程 几何方程表达应变分量与位移分量之间的关系。平面问题几何方程的表达 式为 6-器 6-8器 (1.4) %器+兴 3)本构方程 材料的本构方程表达应力与应变之间的关系。对于各向同性线性弹性介 质,有 G=D& (1.5) 根据广义Hooke定律,不难得到平面问题的弹性矩阵D。例如,对于平面应力 问题 「1y 0 E D1-2 y10 (1.6) 001-)2 对于平面应变问题,只要把上述各式中的E换成E/(-),把y换成y(-) 即可。 1.1.3边界条件 边界条件是指求解域Q的边界下上所受到的外加约束或作用。通常下可 以分为两个部分,即面力边界T,和位移边界T:在T。上给定面力,在T,上给 定位移。有时在同一边界上,同时给定一部分面力和一部分位移,这种边界称为 混合边界。 1)应力边界条件 在Γ,附近取微元体,面力与应力之间的平衡条件就是应力边界条件。在 平面问题中,有
其中X,Y 分别为体力沿x,y方向的分量。f为体力向量,即 f= X { }Y =[ ] X Y T (2)几何方程 几何方程表达应变分量与位移分量之间的关系。平面问题几何方程的表达 式为 εx=u x εy=v y γxy=v x+u 烍 烌 y烎 (14) (3)本构方程 材料的本构方程表达应力与应变之间的关系。对于各向同性线性弹性介 质,有 σ=Dε (15) 根据广义 Hooke定律,不难得到平面问题的弹性矩阵 D。例如,对于平面应力 问题 D= E 1-ν2 1 ν 0 ν 1 0 0 0 (1-ν)/ 熿 燀 燄 2燅 (16) 对于平面应变问题,只要把上述各式中的E 换成E/(1-ν2),把ν换成ν/(1-ν) 即可。 113 边界条件 边界条件是指求解域Ω 的边界Γ 上所受到的外加约束或作用。通常Γ 可 以分为两个部分,即面力边界Γσ和位移边界Γu;在Γσ 上给定面力,在Γu 上给 定位移。有时在同一边界上,同时给定一部分面力和一部分位移,这种边界称为 混合边界。 (1)应力边界条件 在Γσ附近取微元体,面力与应力之间的平衡条件就是应力边界条件。在 平面问题中,有 11 弹性力学平面问题 3

第1章有限单元法基本程式 lo:+mtyr =X ltn+moy=Y 1.7) 其中,不,了为已知的边界面力沿x,y方向的分量,面力向量p记为 。==心 ,m为边界外法线N的方向余弦,l==c0sN,x),m=,=cosW,y)。 2)位移边界条件 位移边界条件是指结构在位移边界下,上所受到的约束。在平面问题中 可表示为 u=u, v=U 1.8) 其中,u,。为已知的边界位移分量。 1.1.4问题解法 1)解析方法 求解上述问题可以采用解析方法,即在给出的边界条件下直接求解控制微 分方程,得出解析函数形式的解答。在具体求解时,可选择某些未知量作为基本 未知量,从而简化控制方程组。根据基本未知量的选取,可将求解方法分为位移 法、应力法和混合法,它们分别以位移分量、应力分量、一部分位移分量和一部分 应力分量为基本未知量。 ②)近似方法 对于很多实际问题,要获得解析解是不可能的。为了克服数学上的困难,学 者们提出了多种近似求解方法,例如有限差分法、变分法、有限单元法等,其中有 限单元法以其理论基础坚实、实用性极强等突出优点而被公认为最有效的数值 方法。 在有限单元法中,位移法应用最为广泛,其基本思想可简述如下:将结构离 散成有限个单元,每个单元设定若干个节点:选取节点位移作为基本未知量,并 在每个单元区域内选用某种插值函数以近似地表示单元内位移的分布:利用某 种原理(例如虚位移原理)建立求解基本未知量的方程组。 1.2结构离散 结构有限元分析的第一步是将结构离散化,即用假想的线或面将连续体分 割成数目有限的单元,并在其上设定有限个节点:用这些单元组成的单元集合体
lσx+mτyx=珚X lτxy+mσy=珡烍 烌 Y烎 (17) 其中,珚X,珡Y 为已知的边界面力沿x,y方向的分量,面力向量珔p记为 珔p= 珚X { }珡Y =[ ] 珚X 珡Y T l,m 为边界外法线N 的方向余弦,l=nx=cos(N,x),m=ny=cos(N,y)。 (2)位移边界条件 位移边界条件是指结构在位移边界Γu 上所受到的约束。在平面问题中, 可表示为 u=珔u, v=珔v (18) 其中,珔u,珔v为已知的边界位移分量。 114 问题解法 (1)解析方法 求解上述问题可以采用解析方法,即在给出的边界条件下直接求解控制微 分方程,得出解析函数形式的解答。在具体求解时,可选择某些未知量作为基本 未知量,从而简化控制方程组。根据基本未知量的选取,可将求解方法分为位移 法、应力法和混合法,它们分别以位移分量、应力分量、一部分位移分量和一部分 应力分量为基本未知量。 (2)近似方法 对于很多实际问题,要获得解析解是不可能的。为了克服数学上的困难,学 者们提出了多种近似求解方法,例如有限差分法、变分法、有限单元法等,其中有 限单元法以其理论基础坚实、实用性极强等突出优点而被公认为最有效的数值 方法。 在有限单元法中,位移法应用最为广泛,其基本思想可简述如下:将结构离 散成有限个单元,每个单元设定若干个节点;选取节点位移作为基本未知量,并 在每个单元区域内选用某种插值函数以近似地表示单元内位移的分布;利用某 种原理(例如虚位移原理)建立求解基本未知量的方程组。 12 结 构 离 散 结构有限元分析的第一步是将结构离散化,即用假想的线或面将连续体分 割成数目有限的单元,并在其上设定有限个节点;用这些单元组成的单元集合体 4 第1章 有限单元法基本程式
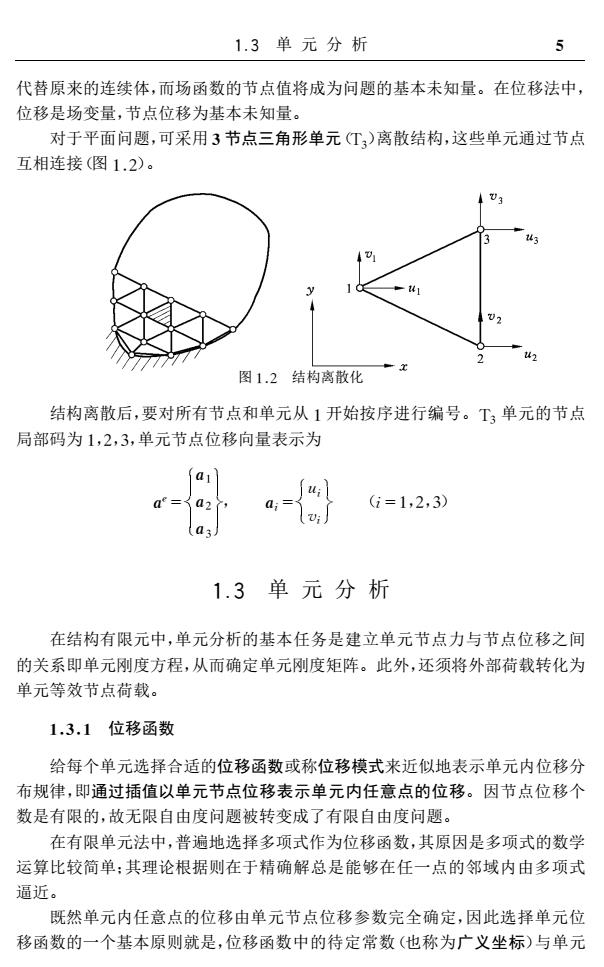
1.3单元分析 代替原来的连续体,而场函数的节点值将成为问题的基本未知量。在位移法中, 位移是场变量,节点位移为基本未知量。 对于平面问题,可采用3节点三角形单元(T)离散结构,这些单元通过节点 互相连接(图1.2)。 3 图1.2结构离散化 结构离散后,要对所有节点和单元从1开始按序进行编号。T3单元的节点 局部码为1,2,3,单元节点位移向量表示为 a1 a=a2, a (7=1,2,3) ta 1.3单元分析 在结构有限元中,单元分析的基本任务是建立单元节点力与节点位移之间 的关系即单元刚度方程,从而确定单元刚度矩阵。此外,还须将外部荷载转化为 单元等效节点荷载。 1.3.1位移函数 给每个单元选择合适的位移函数或称位移模式来近似地表示单元内位移分 布规律,即通过插值以单元节点位移表示单元内任意点的位移。因节点位移个 数是有限的,故无限自由度问题被转变成了有限自由度问题。 在有限单元法中,普遍地选择多项式作为位移函数,其原因是多项式的数学 运算比较简单:其理论根据则在于精确解总是能够在任一点的邻域内由多项式 逼近。 既然单元内任意点的位移由单元节点位移参数完全确定,因此选择单元位 移函数的一个基本原则就是,位移函数中的待定常数(也称为广义坐标)与单元
代替原来的连续体,而场函数的节点值将成为问题的基本未知量。在位移法中, 位移是场变量,节点位移为基本未知量。 对于平面问题,可采用3节点三角形单元(T3)离散结构,这些单元通过节点 互相连接(图12)。 图12 结构离散化 结构离散后,要对所有节点和单元从1开始按序进行编号。T3单元的节点 局部码为1,2,3,单元节点位移向量表示为 ae= a1 a2 a 烅 烄 烆 烍 烌 3烎 , ai= ui v 烅 烄 烆 烍 烌 i烎 (i=1,2,3) 13 单 元 分 析 在结构有限元中,单元分析的基本任务是建立单元节点力与节点位移之间 的关系即单元刚度方程,从而确定单元刚度矩阵。此外,还须将外部荷载转化为 单元等效节点荷载。 131 位移函数 给每个单元选择合适的位移函数或称位移模式来近似地表示单元内位移分 布规律,即通过插值以单元节点位移表示单元内任意点的位移。因节点位移个 数是有限的,故无限自由度问题被转变成了有限自由度问题。 在有限单元法中,普遍地选择多项式作为位移函数,其原因是多项式的数学 运算比较简单;其理论根据则在于精确解总是能够在任一点的邻域内由多项式 逼近。 既然单元内任意点的位移由单元节点位移参数完全确定,因此选择单元位 移函数的一个基本原则就是,位移函数中的待定常数(也称为广义坐标)与单元 13 单 元 分 析 5

6 第1章有限单元法基本程式 节点位移参数相等。T;单元共有6个节点位移分量,故位移函数应包含6个待 定常数。为此,可假设单元内的位移为x,y的线性函数,即 u=al+azx+asy v-as+asx+a6y) 设节点1,2,3的坐标分别为(x1,y),(x2,y2),(x3,y3)。将节点位移分量 和节点坐标代入式a) u1=a1+a2x1+a3y1 U1=a4+a5x1+a6y1 u2=a1+a2x2+a3y2 v2=a4+a5x2+a6y2 6) u3=a1+a2x3+a3y3 v3=a4+a5x3+a6y3 可求得待定系数:再将求得的系数代入式a),整理后得 u=Niu+N2uz+N3u3 (1.9a) v=N11+N2v2+N3V3 学 =)=IINI=d 1.9%) 其中,I是二阶单位矩阵,即 -0 八,是插值函数,它们决定单元位移场的基本形态,且只与单元的形状、节点的配 置及插值方式有关,故通常称为形函数:N称为形函数矩阵。N的元素为 N:-2A (ai+b+c) (i=1,2,3) 1.10) 其中的常数为 Q;= Im ym =工ym一工my 1 y =yj-ym (1.11) 1 Ci=1 Im =-+xm i,jm=2,3)
节点位移参数相等。T3单元共有6个节点位移分量,故位移函数应包含6个待 定常数。为此,可假设单元内的位移为x,y的线性函数,即 u=α1+α2x+α3y v=α4+α5x+α6 烍 烌 y烎 (a) 设节点1,2,3的坐标分别为(x1,y1),(x2,y2),(x3,y3)。将节点位移分量 和节点坐标代入式(a) u1=α1+α2x1+α3y1 u2=α1+α2x2+α3y2 u3=α1+α2x3+α3y 烍 烌 3烎 , v1=α4+α5x1+α6y1 v2=α4+α5x2+α6y2 v3=α4+α5x3+α6y 烍 烌 3烎 (b) 可求得待定系数;再将求得的系数代入式(a),整理后得 u=N1u1+N2u2+N3u3 v=N1v1+N2v2+N3v 烍 烌 3烎 (19a) 或 u= u { }v =[ ] N1I N2I N3Iae=Nae (19b) 其中,I是二阶单位矩阵,即 I= 1 0 [ ] 0 1 Ni是插值函数,它们决定单元位移场的基本形态,且只与单元的形状、节点的配 置及插值方式有关,故通常称为形函数;N 称为形函数矩阵。N 的元素为 Ni= 1 2A (ai+bix+ciy) (i=1,2,3) (110) 其中的常数为 ai= xj yj xm ym =xjym-xmyj bi=- 1 yj 1 ym =yj-ym ci= 1 xj 1 xm =-xj+xm (i,j,m=1,2, → ← 3 烍 烌 烎 ) (111) 6 第1章 有限单元法基本程式
1.3单元分析 > |1x1y1 2A=1x22 (1.12) 1x3y3 根据解析几何,式1.12)中的A等于三角形单元的面积。为使求得面积的 值不致成为负值,节点1,2,3的次序必须是逆时针转向(图1.2)。此外,a,b: 和c:是行列式2A第i行各元素的代数余子式。 1.3.2应变和应力 单元位移函数确定以后,未知量就归结为节点位移。将单元位移函数(1.9) 代入几何方程(1,4),可得以单元节点位移表示的单元应变 b10b20c301 2A 0c10c20c3 (.13a) LCI b1 c2 b2 C3 b3 ε=[B1B2B3]a=Ba (1.13b) 其中 b07 1 B:=2A 0 ci (=1,2,3) 1.14) Lci bi 可见,应变矩阵的元素为常数,单元应变自然也是常数。因此,T3单元称为 常应变三角形单元,简称CST单元。将式(1.13)代入本构方程(1.5)得到用节 点位移表示的单元应力 =Ds=DBa (1.15a) 或 o=Sa'=[S1 S2 S3 ]a 1.15b) 对于平面应力问题,应力矩阵S的子矩阵为 [bi E s2-A出c,之 (i=1,2,3) 1.16)
2A= 1 x1 y1 1 x2 y2 1 x3 y3 (112) 根据解析几何,式(112)中的A 等于三角形单元的面积。为使求得面积的 值不致成为负值,节点1,2,3的次序必须是逆时针转向(图12)。此外,ai,bi 和ci是行列式2A 第i行各元素的代数余子式。 132 应变和应力 单元位移函数确定以后,未知量就归结为节点位移。将单元位移函数(19) 代入几何方程(14),可得以单元节点位移表示的单元应变 ε= εx εy γx 烅 烄 烆 烍 烌 y烎 = 1 2A b1 0 b2 0 c3 0 0 c1 0 c2 0 c3 c1 b1 c2 b2 c3 b 熿 燀 燄 3燅 ae (113a) 或 ε=[ ] B1 B2 B3 ae=Bae (113b) 其中 Bi= 1 2A bi 0 0 ci ci b 熿 燀 燄 i燅 (i=1,2,3) (114) 可见,应变矩阵的元素为常数,单元应变自然也是常数。因此,T3单元称为 常应变三角形单元,简称CST单元。将式(113)代入本构方程(15)得到用节 点位移表示的单元应力 σ=Dε=DBae (115a) 或 σ=Sae=[ ] S1 S2 S3 ae (115b) 对于平面应力问题,应力矩阵S的子矩阵为 Si= E 2(1-ν2)A bi νci νbi ci 1-ν 2 ci 1-ν 2 b 熿 燀 燄 i燅 (i=1,2,3) (116) 13 单 元 分 析 7