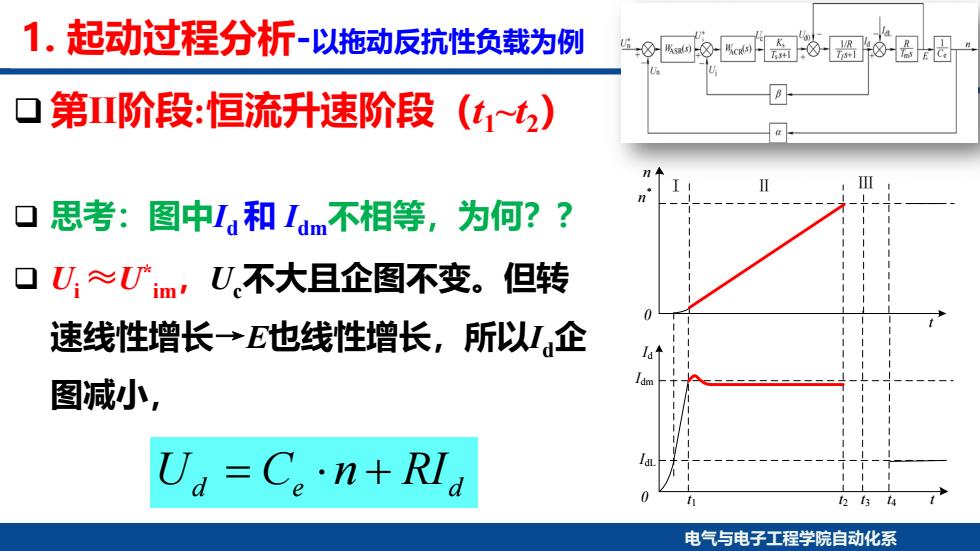
1.起动过程分析-以拖动反抗性负载为例 ,8k8-高8-品感-因因一 第Π阶段:恒流升速阶段(tt2) 思考:图中1a和Iam不相等,为何?? U≈Um,U不大且企图不变。但转 速线性增长→E也线性增长,所以虹,企 图减小, Ud =Cen+RId 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 1. 起动过程分析-以拖动反抗性负载为例 Ⅰ Ⅱ Ⅲ n n* t t1 t2 t3 t4 t Id IdL Idm 0 de d 0 U C n RI = ⋅+ 第Ⅱ阶段:恒流升速阶段(t1~t2) 思考:图中Id 和 Idm不相等,为何?? Ui ≈U* im,Uc不大且企图不变。但转 速线性增长→E也线性增长,所以Id企 图减小
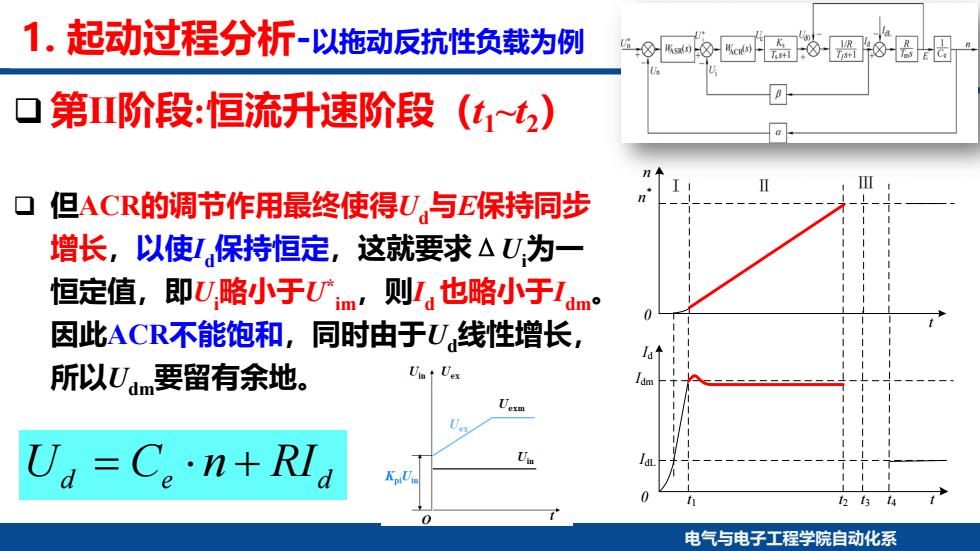
1.起动过程分析-以拖动反抗性负载为例 5-⑧w®-高δ-品8-图因 第Ⅲ阶段:恒流升速阶段(tt2) 但ACR的调节作用最终使得U,与E保持同步 增长,以使保持恒定,这就要求△U为一 恒定值,即U略小于Vm,则,也略小于1m。 因此ACR不能饱和,同时由于U线性增长, 所以Uam要留有余地。 Ua=C。n+RIa 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 1. 起动过程分析-以拖动反抗性负载为例 Ⅰ Ⅱ Ⅲ n n* t t1 t2 t3 t4 t Id IdL Idm 0 0 第Ⅱ阶段:恒流升速阶段(t1~t2) 但ACR的调节作用最终使得Ud与E保持同步 增长,以使Id保持恒定,这就要求ΔUi 为一 恒定值,即Ui 略小于U* im,则Id 也略小于Idm。 因此ACR不能饱和,同时由于Ud线性增长, 所以Udm要留有余地。 U C n RI de d = ⋅+
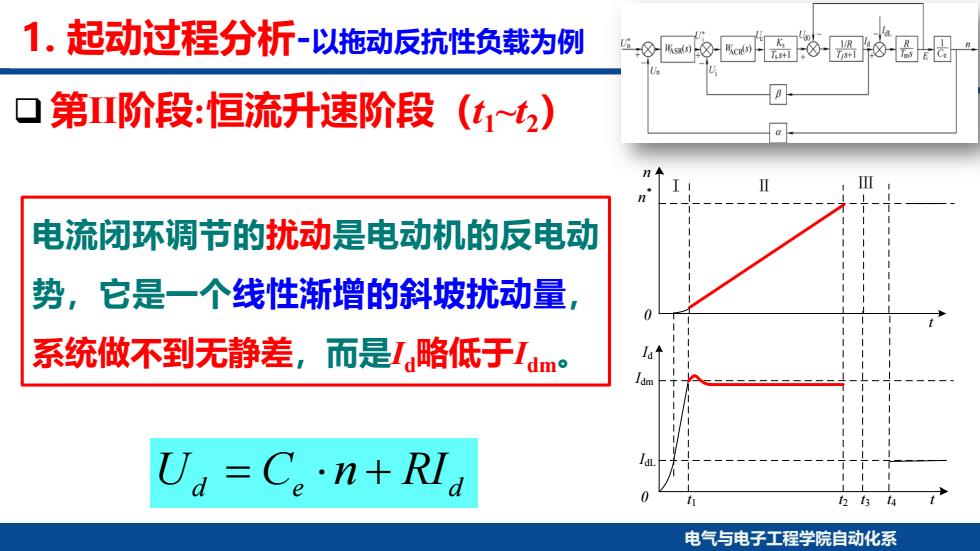
1.起动过程分析-以拖动反抗性负载为例 “,88-高8-槛8-8因 第Π阶段:恒流升速阶段(tt2) n 电流闭环调节的扰动是电动机的反电动 势,它是一个线性渐增的斜坡扰动量, 系统做不到无静差,而是I略低于1m U=Con+Rld 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 1. 起动过程分析-以拖动反抗性负载为例 Ⅰ Ⅱ Ⅲ n n* t t1 t2 t3 t4 t Id IdL Idm 0 0 第Ⅱ阶段:恒流升速阶段(t1~t2) 电流闭环调节的扰动是电动机的反电动 势,它是一个线性渐增的斜坡扰动量, 系统做不到无静差,而是Id略低于Idm。 U C n RI de d = ⋅+

1.起动过程分析-以拖动反抗性负载为例 5-⑧w®-高δ-品8-图因 口第Ⅲ阶段:恒流升速阶段(t1t2) 恒流升速阶段是起动过程中的主要阶段。 为了保证电流环的主要调节作用,在起 动过程中ACR是不应饱和的,电力电子 装置UPE的最大输出电压也须留有余 地,这些都是设计时必须注意的。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 1. 起动过程分析-以拖动反抗性负载为例 Ⅰ Ⅱ Ⅲ n n* t t1 t2 t3 t4 t Id IdL Idm 0 0 第Ⅱ阶段:恒流升速阶段(t1~t2) 恒流升速阶段是起动过程中的主要阶段。 为了保证电流环的主要调节作用,在起 动过程中 ACR是不应饱和的,电力电子 装置 UPE 的最大输出电压也须留有余 地,这些都是设计时必须注意的