电流截止负反馈 山东程子大军 口转速单闭环系统并不能按照要求充分控制电流(或电磁转矩)的动态 过程。 口电流截止负反馈不可以么? 口在单闭环直流调速系统中,电流截止负反馈环节是专门用来控制 电流的,但它只能在超过临界电流值Icr以后,靠强烈的负反馈 作用限制电流的冲击,并不能很理想地控制电流的动态波形。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 电流截止负反馈 转速单闭环系统并不能按照要求充分控制电流(或电磁转矩)的动态 过程。 电流截止负反馈不可以么? 在单闭环直流调速系统中,电流截止负反馈环节是专门用来控制 电流的,但它只能在超过临界电流值 Idcr 以后,靠强烈的负反馈 作用限制电流的冲击,并不能很理想地控制电流的动态波形
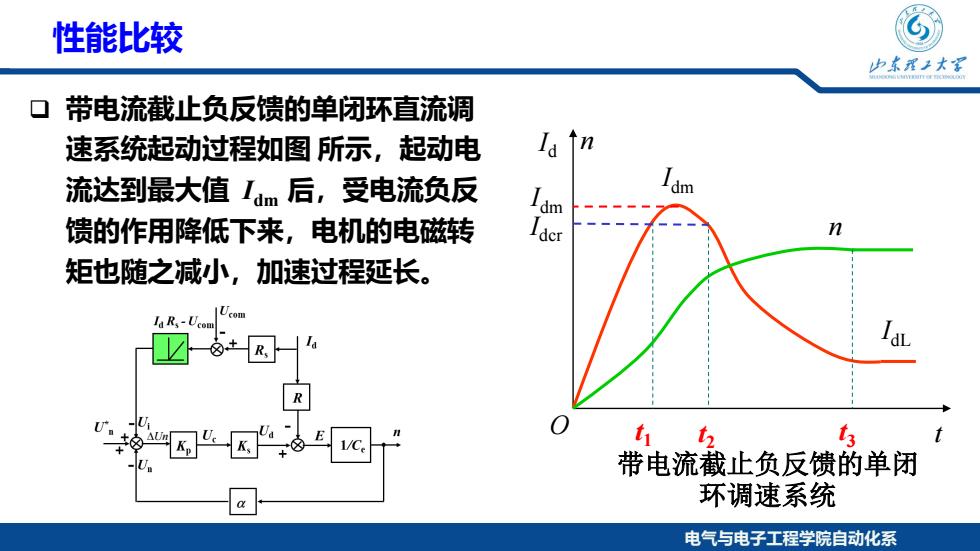
性能比较 少东我子大深 带电流截止负反馈的单闭环直流调 速系统起动过程如图所示,起动电 流达到最大值Im后,受电流负反 馈的作用降低下来,电机的电磁转 矩也随之减小,加速过程延长。 Ja R.-Ucom Ucom ☑±风H /dL tt t U 带电流截止负反馈的单闭 a 环调速系统 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 性能比较 带电流截止负反馈的单闭环直流调 速系统起动过程如图 所示,起动电 流达到最大值 Idm 后,受电流负反 馈的作用降低下来,电机的电磁转 矩也随之减小,加速过程延长。 带电流截止负反馈的单闭 环调速系统 IdL n t Id O Idm Idcr t1 t2 t3 Idm n ∆Un
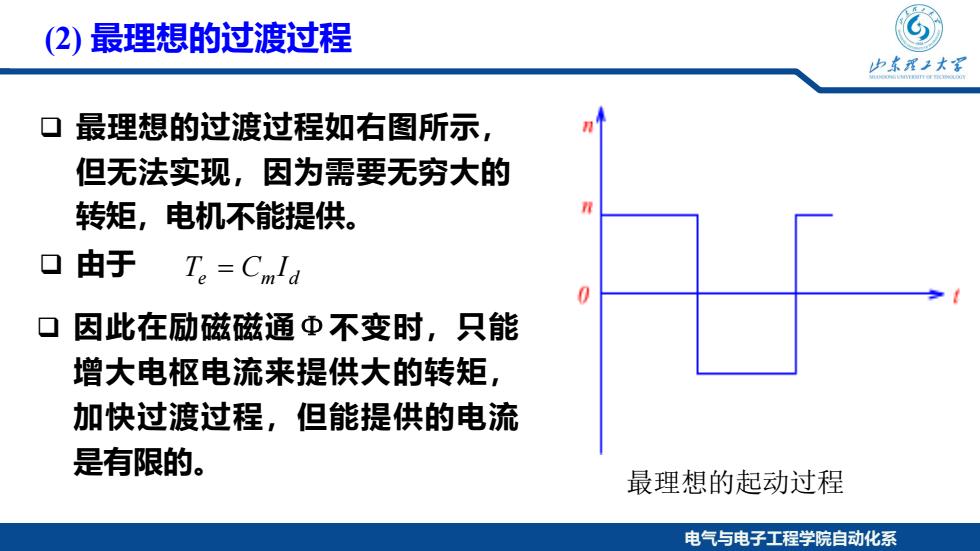
(2)最理想的过渡过程 山东理子大军 最理想的过渡过程如右图所示, 但无法实现,因为需要无穷大的 转矩,电机不能提供。 程 由于T。=Cmld 0 因此在励磁磁通Φ不变时,只能 增大电枢电流来提供大的转矩, 加快过渡过程,但能提供的电流 是有限的。 最理想的起动过程 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 (2) 最理想的过渡过程 最理想的过渡过程如右图所示, 但无法实现,因为需要无穷大的 转矩,电机不能提供。 由于 最理想的起动过程 e m d T = C I 因此在励磁磁通Φ不变时,只能 增大电枢电流来提供大的转矩, 加快过渡过程,但能提供的电流 是有限的
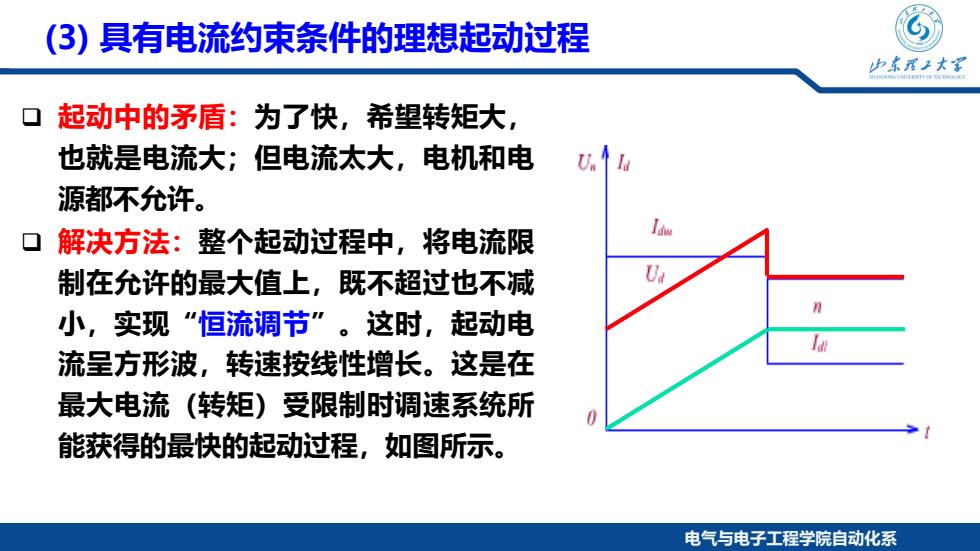
(③)具有电流约束条件的理想起动过程 山东我上大军 ▣ 起动中的矛盾:为了快,希望转矩大, 也就是电流大;但电流太大,电机和电 U.' 源都不允许。 口解决方法:整个起动过程中,将电流限 制在允许的最大值上,既不超过也不减 Ua 小,实现“恒流调节”。这时,起动电 流呈方形波,转速按线性增长。这是在 最大电流(转矩)受限制时调速系统所 能获得的最快的起动过程,如图所示。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 (3) 具有电流约束条件的理想起动过程 起动中的矛盾:为了快,希望转矩大, 也就是电流大;但电流太大,电机和电 源都不允许。 解决方法:整个起动过程中,将电流限 制在允许的最大值上,既不超过也不减 小,实现“恒流调节” 。这时,起动电 流呈方形波,转速按线性增长。这是在 最大电流(转矩)受限制时调速系统所 能获得的最快的起动过程,如图所示
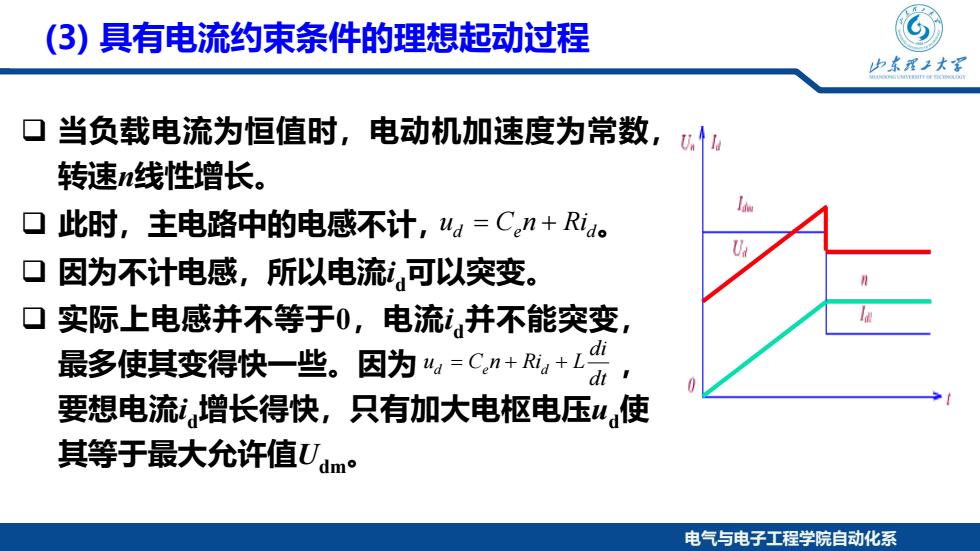
(3)具有电流约束条件的理想起动过程 山东理子大军 当负载电流为恒值时,电动机加速度为常数,心 转速n线性增长。 口此时,主电路中的电感不计,ua=Cen+Ria。 U 因为不计电感,所以电流可以突变。 口 实际上电感并不等于0,电流,并不能突变, 最多使其变得快一些。因为4=Cn+,+L应 要想电流i,增长得快,只有加大电枢电压4使 其等于最大允许值Uam。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 (3) 具有电流约束条件的理想起动过程 当负载电流为恒值时,电动机加速度为常数, 转速n线性增长。 此时,主电路中的电感不计, 。 因为不计电感,所以电流i d可以突变。 实际上电感并不等于0,电流i d并不能突变, 最多使其变得快一些。因为 , 要想电流i d增长得快,只有加大电枢电压ud使 其等于最大允许值Udm。 ud = Cen + Rid dt di ud = Cen + Rid + L