1.1引言1.1.1自动控制理论发展简史圖之壶挚团远古时期的自动装置刻漏:右氏莲Y最初两个壶,由上壶滴水到下面的受水壶液面使浮箭升起以示刻度(即时间)(图周之右)。这里浮箭可看作是检测元件。保持上壶的水位恒定,则是自动调节的问题。用互相衔接的多级(3~5级)水S壶解决的。莲华漏(图之左由4个壶组成平水壶向平水小壶供水,平水小壶上有受水蛋溢水口,可使多余水泄入减水桶以保持水面恒定在莲华漏中还采用一个浮子式阀门作为自动切断阀。当受水壶的水位升至满刻水斜水度时,浮子式阀门就会自动阻塞上级平图3蓬华漏计时装置水小壶的出水小孔,切断水滴
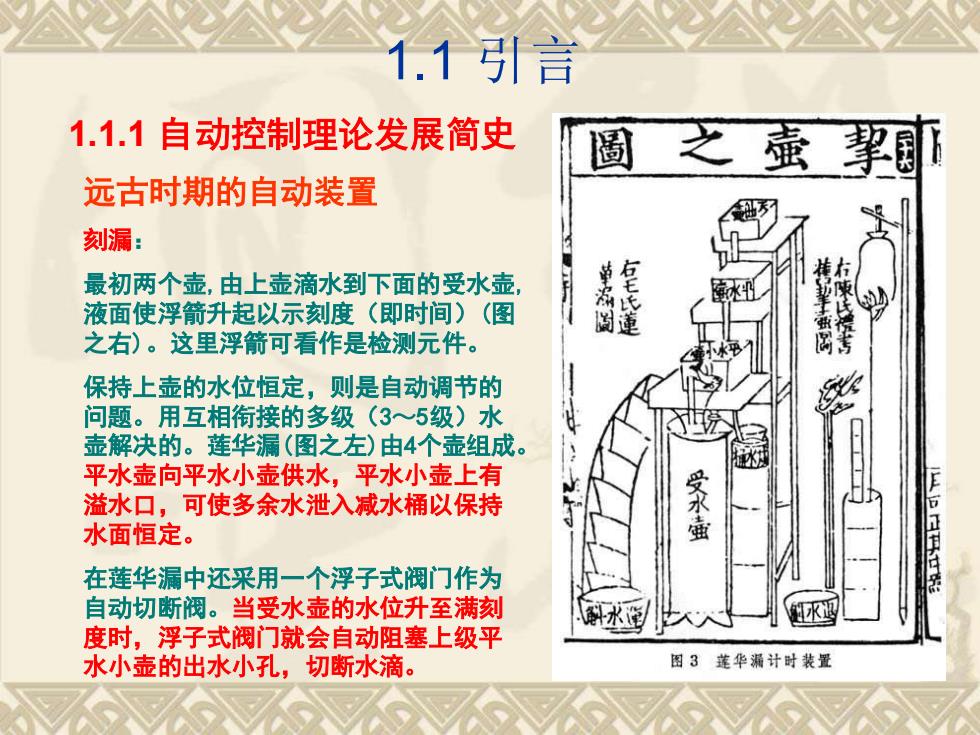
1.1 引言 刻漏: 最初两个壶,由上壶滴水到下面的受水壶, 液面使浮箭升起以示刻度(即时间)(图 之右)。这里浮箭可看作是检测元件。 保持上壶的水位恒定,则是自动调节的 问题。用互相衔接的多级(3~5级)水 壶解决的。莲华漏(图之左)由4个壶组成。 平水壶向平水小壶供水,平水小壶上有 溢水口,可使多余水泄入减水桶以保持 水面恒定。 在莲华漏中还采用一个浮子式阀门作为 自动切断阀。当受水壶的水位升至满刻 度时,浮子式阀门就会自动阻塞上级平 水小壶的出水小孔,切断水滴。 1.1.1 自动控制理论发展简史 远古时期的自动装置
1.1引言62指南车后视图指南车维视图1.足轮2.立轮3.小平轮4.中心大平轮1.足轮2.立轮3.小平轮4.中心大平轮5.贷心立轴6.车7.车箱8.滑轮9.拉5.货心轴6.车装7.车租9.拉款指南车采用差动齿轮的机械原理车里面装有多个大小不同的齿轮,直行,小轮悬空:转弯时,一边的小轮在、绳、滑轮的作用下降,与车轮和大轮发生啮合传动。若车子向左转90度左轮不动,右轮要转半周。与右轮相连的小齿轮也就转半周(即转过12个齿),经过小平轮传动到大平轮,则大平轮将以相反的方向转动12个齿,即1/4周(90度),仙人在和车一起左转90度时,又由于齿轮的齿合传动右转了90度。其他运动情况的结果可以类推。仙人指向不变
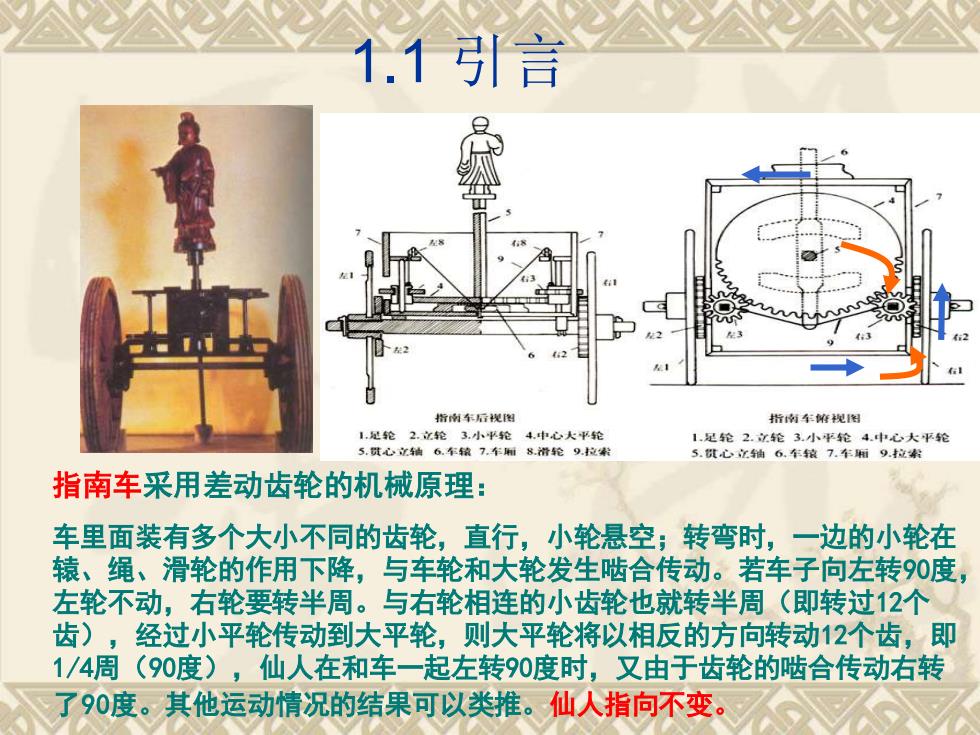
1.1 引言 指南车采用差动齿轮的机械原理: 车里面装有多个大小不同的齿轮,直行,小轮悬空;转弯时,一边的小轮在 辕、绳、滑轮的作用下降,与车轮和大轮发生啮合传动。若车子向左转90度, 左轮不动,右轮要转半周。与右轮相连的小齿轮也就转半周(即转过12个 齿),经过小平轮传动到大平轮,则大平轮将以相反的方向转动12个齿,即 1/4周(90度),仙人在和车一起左转90度时,又由于齿轮的啮合传动右转 了90度。其他运动情况的结果可以类推。仙人指向不变

1.1引言记里鼓车侧视图1.右足轮2.文轮3.下平轮4.旋风轮5.中平轮候风地动仪的关键机构,是一根称为计里鼓车,车中有一套减速齿轮系“都柱”的倒立摆,其重心高于摆动始终与车轮同时转动,其最未一只齿中心。在受地震横波袭击时,由于惯轮轴在车行一里时正好回转一周,车性力作用,它将倒向震源方向,从而子上层的木人车上木人受凸轮牵动,带动该方向的传动部件,使相应方向由绳索拉起木人右臂击鼓一次,以示的龙口上额起挠,龙口中的铜丸便掉里程。这一原理与现代汽车上的里程落在蟾蜍口中表的原理相同
1.1 引言 计里鼓车,车中有一套减速齿轮系, 始终与车轮同时转动,其最末一只齿 轮轴在车行一里时正好回转一周,车 子上层的木人车上木人受凸轮牵动, 由绳索拉起木人右臂击鼓一次,以示 里程。这一原理与现代汽车上的里程 表的原理相同。 候风地动仪的关键机构,是一根称为 “都柱”的倒立摆,其重心高于摆动 中心。在受地震横波袭击时,由于惯 性力作用,它将倒向震源方向,从而 带动该方向的传动部件,使相应方向 的龙口上额起挠,龙口中的铜丸便掉 落在蟾蜍口中
1.1 引言近代控制理论的逐步形成和发展“因果关系”而古代的自动装置主要是基于相对直观的发明的,因而并未产生自动控制理论。这与18世纪未开始逐渐发展起来的、基于反馈原理的自动装置有着本质的不同。反馈使“因果关系”进一步发展成为更加复杂的“因果一果因关系”“由于反馈形成的回路使“因果”双向相互作用,已不再是简单的逻辑关系,因此,人们门为做到知其所以然地设计好基于反馈原理的自动装置,必须对反馈控制理论加以研究,这也是反馈控制理论发展的初始推动力
1.1 引言 古代的自动装置主要是基于相对直观的“因果关系”而 发明的,因而并未产生自动控制理论。 这与18世纪末开始逐渐发展起来的、基于反馈原理的自 动装置有着本质的不同。反馈使“因果关系”进一步发 展成为更加复杂的“因果-果因关系” 。 由于反馈形成的回路使“因果”双向相互作用,已不再 是简单的逻辑关系,因此,人们为做到知其所以然地设 计好基于反馈原理的自动装置,必须对反馈控制理论加 以研究,这也是反馈控制理论发展的初始推动力。 近代控制理论的逐步形成和发展
1.1引言近代控制理论的逐步形成和发展1、用于工业过程的自动反馈控制器-飞球调速器1769瓦特发明了飞球调速器用来与蒸汽机的进气阀连接构成蒸汽机转速的闭环自动瓦特改良的蒸汽机调速系统。2、动态特性研究的开始:英国剑桥大学的数学和天文学家艾里在1829-1835系统研究了天文望远镜的速度控制,根据倒立摆离心力的原理首次发现了反馈系统的不稳定性,并利用微分方程分析了这种系统瓦特艾里
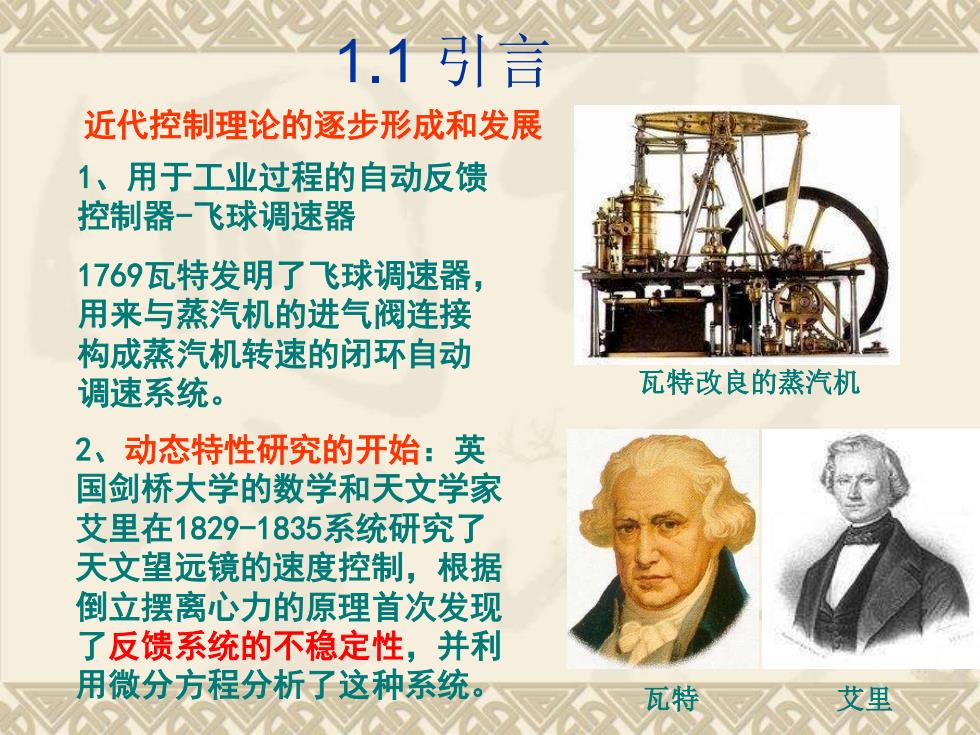
1.1 引言 1、用于工业过程的自动反馈 控制器-飞球调速器 1769瓦特发明了飞球调速器, 用来与蒸汽机的进气阀连接 构成蒸汽机转速的闭环自动 调速系统。 2、动态特性研究的开始:英 国剑桥大学的数学和天文学家 艾里在1829-1835系统研究了 天文望远镜的速度控制,根据 倒立摆离心力的原理首次发现 了反馈系统的不稳定性,并利 用微分方程分析了这种系统。 近代控制理论的逐步形成和发展 瓦特改良的蒸汽机 瓦特 艾里