第四讲2.3.5典型环节及其传递函数任何一个复杂系统都是由有限个典型环节组合而成的。典型环节通常分为以下六种:1比例环节G(s)= K式中K-增益特点:输入输出量成比例,无失真和时间延迟,实例:电子放大器,齿轮,电阻(电位器),感应式变送器等。2惯性环节1G(s)=TS +1式中T-时间常数特点:含一个储能元件,对突变的输入其输出不能立即复现,输出无振荡。实例:图2-4所示的RC网络,直流伺服电动机的传递函数也包含这一环节。3微分环节理想微分G(s) = KS一阶微分G(s)= tS + 1二阶微分G(s)= t?s? +25S+1特点:输出量正比输入量变化的速度,能预示输入信号的变化趋势。实例:测速发电机输出电压与输入角度间的传递函数即为微分环节。4积分环节G(s)=1s特点:输出量与输入量的积分成正比例,当输入消失,输出具有记忆功能。实例:电动机角速度与角度间的传递函数,模拟计算机中的积分器等。5振荡环节o21G(s) =$?+250,S+02T25?+25TS+1式中一阻尼比(0≤=<1)の,-自然振荡角频率(无阻尼振荡角频率)T=On特点:环节中有两个独立的储能元件,并可进行能量交换,其输出出现振荡。实例:RLC电路的输出与输入电压间的传递函数。6纯时间延时环节c(t)=r(t-t)G(s) = e27
27 第四讲 2.3.5典型环节及其传递函数 任何一个复杂系统都是由有限个典型环节组合而成的。典型环节通常分 为以下六种: 1 比例环节 G(s) = K 式中 K-增益 特点: 输入输出量成比例,无失真和时间延迟。 实例:电子放大器,齿轮,电阻(电位器),感应式变送器等。 2 惯性环节 1 1 ( ) + = TS G s 式中 T-时间常数 特点: 含一个储能元件,对突变的输入其输出不能立即复现,输出无振 荡。 实例:图2-4所示的RC网络,直流伺服电动机的传递函数也包含这一环节。 3 微分环节 理想微分 G(s) = KS 一阶微分 G(s) = S +1 二阶微分 ( ) 2 1 2 2 G s = S + S + 特点: 输出量正比输入量变化的速度,能预示输入信号的变化趋势。 实例: 测速发电机输出电压与输入角度间的传递函数即为微分环节。 4 积分环节 S G s 1 ( ) = 特点: 输出量与输入量的积分成正比例,当输入消失,输出具有记忆功 能。 实例: 电动机角速度与角度间的传递函数,模拟计算机中的积分器等。 5 振荡环节 2 1 1 2 ( ) 2 2 2 2 2 + + = + + = S S T S TS G s n n n 式中 ξ-阻尼比 (0 1) n -自然振荡角频率(无阻尼振荡角频率) n T 1 = 特点:环节中有两个独立的储能元件,并可进行能量交换,其输出出现振荡。 实例:RLC电路的输出与输入电压间的传递函数。 6 纯时间延时环节 c(t) = r(t − ) s G s e − ( ) =
式中T一延迟时间特点:输出量能准确复现输入量,但须延迟一固定的时间间隔。实例:管道压力、流量等物理量的控制,其数学模型就包含有延迟环节。一对电位器可组成误差检测器0.FK,02K,0,u(t)图2-9电位器u(t)= K,[0(t)-0,(t)]= K,A0(0)K1是单个电位器的传递系统,△e()=e,()-,(t)是两个电位器电刷角位移之差,称误差角。U(s)= K1(s)电位器的负载效应,一般要求R,≥10R,测速发电机一测量角速度并将它转换成电压量的装置直流测速发电机交流测速发电机28
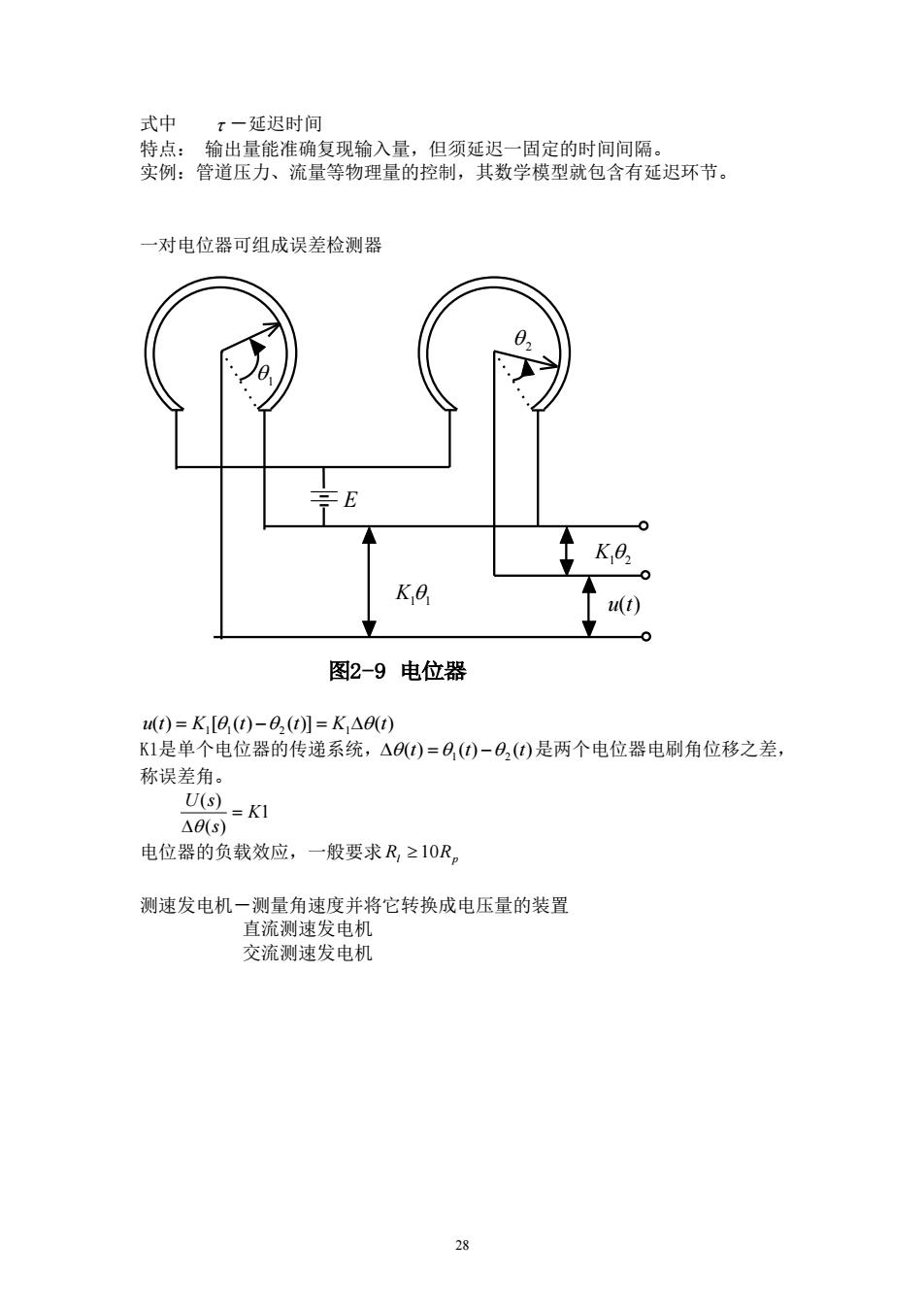
28 式中 -延迟时间 特点: 输出量能准确复现输入量,但须延迟一固定的时间间隔。 实例:管道压力、流量等物理量的控制,其数学模型就包含有延迟环节。 一对电位器可组成误差检测器 ( ) [ ( ) ( )] ( ) 1 1 2 1 u t = K t − t = K t K1是单个电位器的传递系统, ( ) ( ) ( ) 1 2 t = t − t 是两个电位器电刷角位移之差, 称误差角。 1 ( ) ( ) K s U s = 电位器的负载效应,一般要求 Rl 10Rp 测速发电机-测量角速度并将它转换成电压量的装置 直流测速发电机 交流测速发电机 图2-9 电位器 K12 K11 u(t) 1 2 E
wCTG3U(t)激磁绕组。IGo永磁铁输出绕组、相互垂直O(a)U(t)(b)图2-10测速发电机de(t)U(t) = K,0(t) = Kdto(t)=转子角速度(rad/s)K,-输出斜率(v/rad/s)U(s)= K,SG(s) =0(s)U(s)2=K,G(s) =2(s)U(s)2 (s)K?(s)SK,U(s)图2-11电枢控制直流伺服电动机例2中求得电枢控制直流电动机简化后的微分方程为dom(t)T.+0m(t)=K,U.(t)-K,M,(t)dtM.()-可视为负载扰动转距根据线性系统的叠加原理,分别求U.()到の()和M,()到のm()的传递函数。29
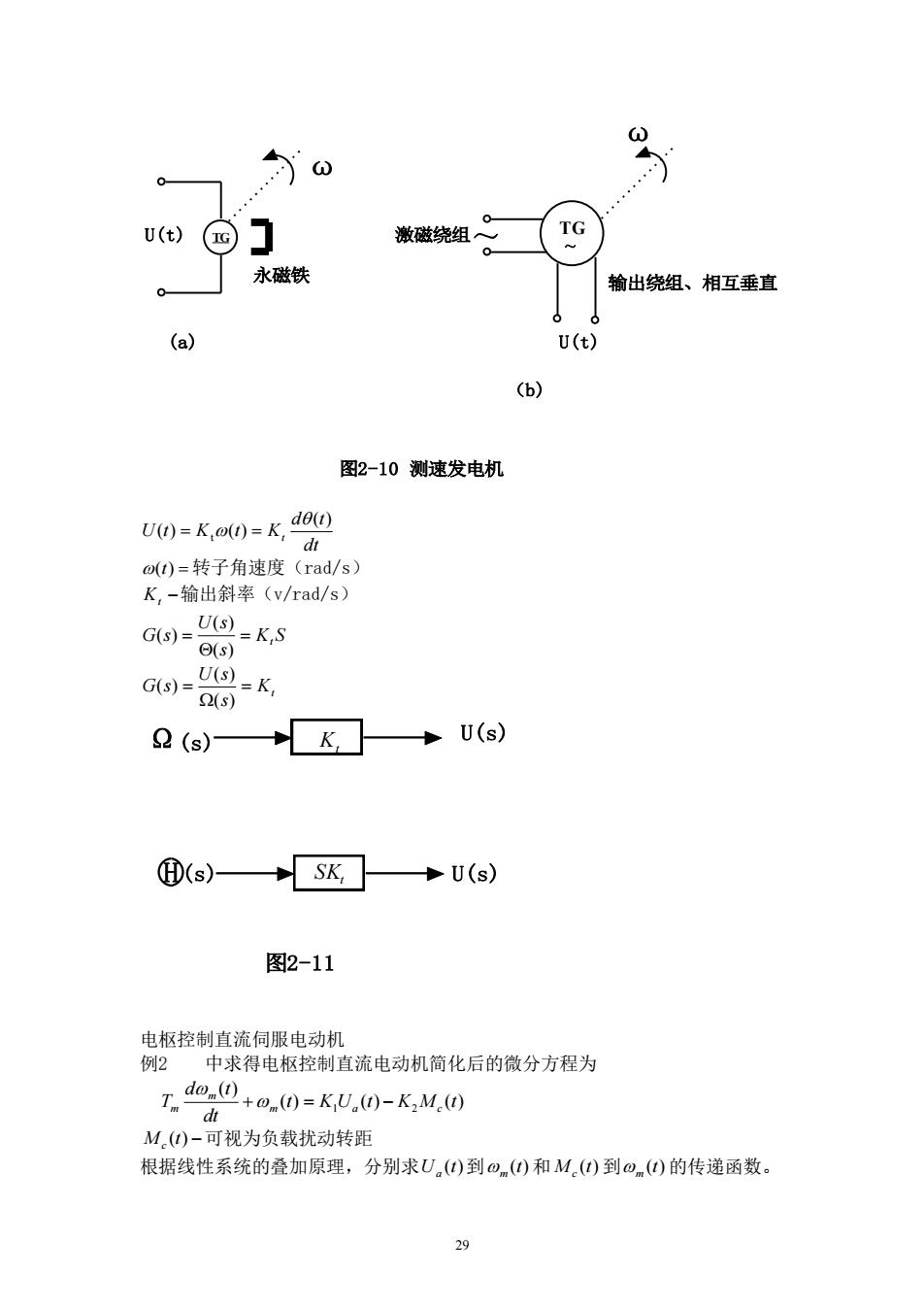
29 图2-10 测速发电机 TG ω U(t) 永磁铁 TG ~ ~ 激磁绕组 (a) U(t) ω (b) 输出绕组、相互垂直 dt d t U t K t Kt ( ) ( ) ( ) t = = (t) = 转子角速度(rad/s) Kt −输出斜率(v/rad/s) K S s U s G s = t = ( ) ( ) ( ) Kt s U s G s = = ( ) ( ) ( ) Ω(s) U(s) U(s) 图2-11 H(s) SKt Kt 电枢控制直流伺服电动机 例2 中求得电枢控制直流电动机简化后的微分方程为 ( ) ( ) ( ) ( ) 1 2 t K U t K M t dt d t T m a c m m + = − Mc (t) −可视为负载扰动转距 根据线性系统的叠加原理,分别求 U (t) a 到 (t) m 和 M (t) c 到 (t) m 的传递函数

a 令M,(t)=0TS2.(s)+2.(s)= K,U.(s)2m(s)-K,由传递函数定义G(s)=(T.S+1)2m(s)= K,U.(s)U.(s)T.S+1b令U.(t)=0T,S2.(s)+Q.(s)=-K,M,(s)2m(s)- K2Gm(s) =M.(s)T.S+1-K,2m(s)M.(s)T.s+1-K,Ua(s)2m(s)T.s+1-K,?(s)Ua(s)s(T.s+1)图2-12de2m(s)= Se(s) :.0:dt两相伺服电动机由互相垂直配置的两相定子线圈和一个高电阻值的转子组成。定子线圈的一相是激磁绕组,另一相是控制绕组,控制绕组通常接在功率放大器的输出端,提供数值和极性可变的交流控制电压。健AUa=100vSM(b)75V2~.50V25VC(a)转速23451图2-13两相伺服电动机及其特性曲线30
30 a 令 M (t) c =0 ( ) ( ) ( ) 1 T S s s K U s m m + m = a ( 1) ( ) ( ) 1 T S s K U s m + m = a 由传递函数定义 ( ) 1 ( ) ( ) 1 + = = T S K U s s G s a m m b 令 Ua (t) = 0 ( ) ( ) ( ) 2 T S s s K M s m m + m = − c ( ) 1 ( ) ( ) 2 + − = = T S K M s s Gm s c m m H(s) Ua(s) Ua(s) 图2-12 1 2 + − T s K m 1 1 + − T s K m ( 1) 1 + − s T s K m (s) m (s) Mc (s) m ∵ dt d = (s) S (s) m = ∴ 两相伺服电动机 由互相垂直配置的两相定子线圈和一个高电阻值的转子组 成。定子线圈的一相是激磁绕组,另一相是控制绕组,控制绕组通常接在功率放 大器的输出端,提供数值和极性可变的交流控制电压。 转 距 25V 50V 75V Ua=100V 1 2 3 4 5 转速 图2-13两相伺服电动机及其特性曲线 SM 2~ ( a) (b)
两相伺服电动机的转矩-速度特性曲线有负的斜率,且呈非线性。图2-13(b)是在不同控制电压u,时,实验测取的一组机械特性曲线。考虑到在控制系统中,伺服电动机一般工作在零转速附近,作为线性化的一种方法,通常把低速部分的线性段延伸到高速范围,用低速直线近似代替非线性特性。此外,也可用小偏差线性化方法。一般,两厢伺服电动机机械特性的线性化方程可表示为Mm=-CaOm+M,(2-3-1)Mm-电动机输出转矩(N·m)のm-电动机的角速度(rad/s)dM㎡-阻尼系数,即机械特性线性化的直线的斜率(N·m/rad /s)Co =domM-堵转转矩,M, =Cyug (2-3-2)M其中C可用额定电压u。=E时的堵转转矩确定,即CME如不考虑负载转矩,则电动机输出转矩用来驱动负载并克服粘性摩擦,故得转矩平衡方程为d-0mdom (2-3-3)M.=J.++fmdtmdt?am-电动机转子角位移(rad)Jm-折算到电动机轴上的总转动惯量(kg·m2)f,-折算到电动机轴上的总粘性摩擦系数(N·m/(rad/s))将(2-4-2)代入(2-4-1)后代入(2-4-3)得d?ede.L=CMuaJ+f.+c-dr?dt取拉氏变换JmsO(s)+(fm+C。)s(s)=CMU.(s)CMKm(s)CM/(fm+C.)U.(s)Jms+(fm+C.)ss(Jms+fm+C)/fm+C)s(Tm+1)CmK.-电动机的传递系数fm+C.JmT-电动机的时间常数f.+CK.@(s)G(s) =U.(s)s(T+I)do...2m(s)K.与直流电动机..2m(s) = s(s):0.dtU.(s)T.$+131
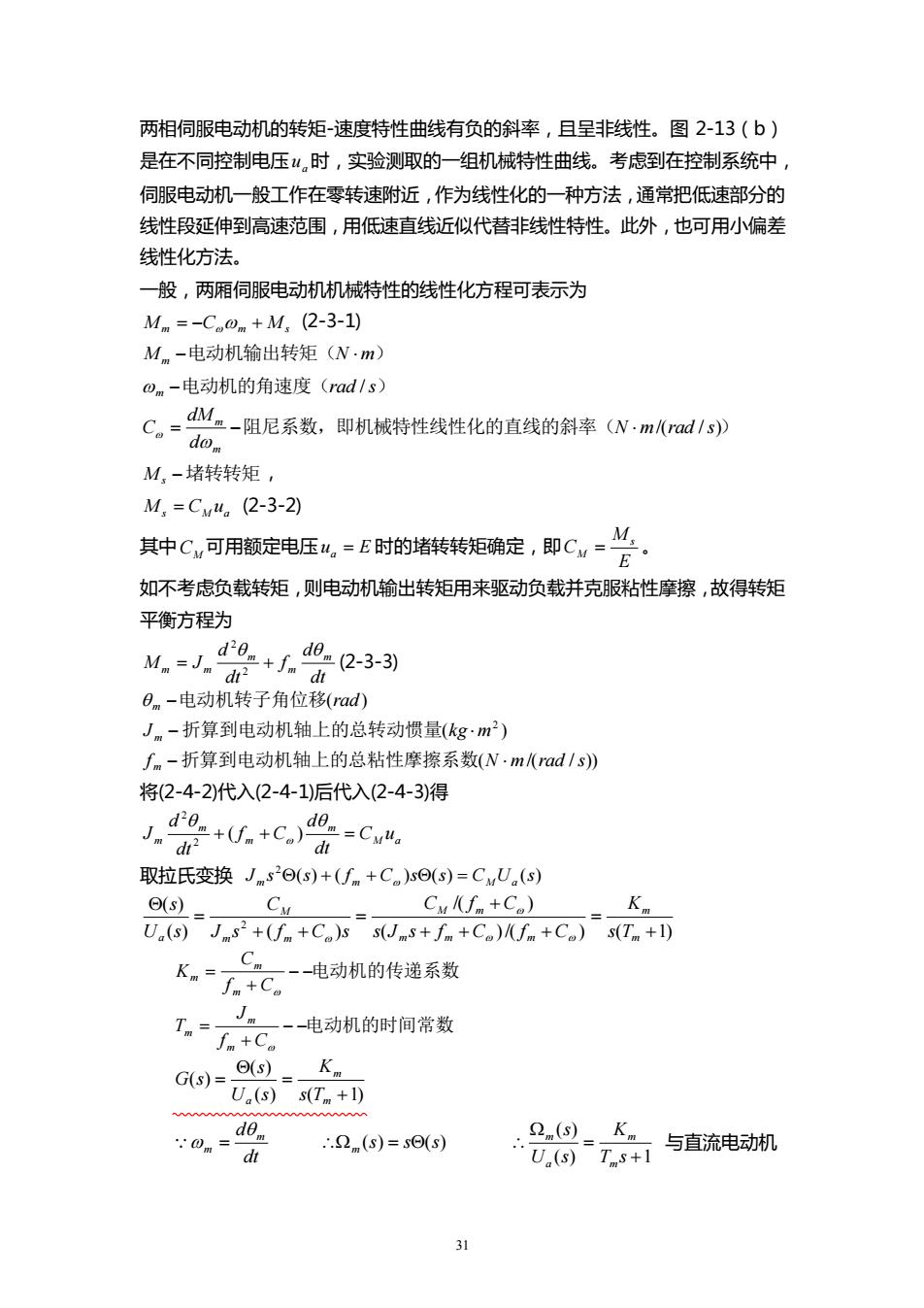
31 两相伺服电动机的转矩-速度特性曲线有负的斜率,且呈非线性。图 2-13(b) 是在不同控制电压 a u 时,实验测取的一组机械特性曲线。考虑到在控制系统中, 伺服电动机一般工作在零转速附近,作为线性化的一种方法,通常把低速部分的 线性段延伸到高速范围,用低速直线近似代替非线性特性。此外,也可用小偏差 线性化方法。 一般,两厢伺服电动机机械特性的线性化方程可表示为 Mm = −C m + Ms (2-3-1) Mm −电动机输出转矩(N m) m −电动机的角速度(rad /s) 阻尼系数,即机械特性线性化的直线的斜率(N m/(rad /s)) d dM C m m = − Ms −堵转转矩, Ms = CM ua (2-3-2) 其中 CM 可用额定电压 ua = E 时的堵转转矩确定,即 E M C s M = 。 如不考虑负载转矩,则电动机输出转矩用来驱动负载并克服粘性摩擦,故得转矩 平衡方程为 dt d f dt d M J m m m m m = + 2 2 (2-3-3) ( /( / )) ( ) ( ) 2 f N m rad s J k g m rad m m m − − − 折算到电动机轴上的总粘性摩擦系数 折算到电动机轴上的总转动惯量 电动机转子角位移 将(2-4-2)代入(2-4-1)后代入(2-4-3)得 M a m m m m C u dt d f C dt d J + + = ( ) 2 2 取拉氏变换 ( ) ( ) ( ) ( ) 2 J s s f C s s C U s m + m + = M a ( )/( ) ( 1) /( ) ( ) ( ) ( ) 2 + = + + + + = + + = m m m m m M m m m M a s T K s J s f C f C C f C J s f C s C U s s 电动机的时间常数 电动机的传递系数 − − + = − − + = f C J T f C C K m m m m m m ( ) ( 1) ( ) ( ) + = = m m a s T K U s s G s ( ) 1 ( ) ( ) ( ) + = = = T s K U s s s s s dt d m m a m m m m 与直流电动机