第六章控制系统的校正前面几章中讨论了控制系统几种基本方法。掌握了这些基本方法,就可以对控制系统进行定性分析和定量计算。本章讨论另一命题,即如何根据系统预先给定的性能指标,去设计一个能满足性能要求的控制系统。基于一个控制系统可视为由控制器和被控对象两大部分组成,当被控对象确定后,对系统的设计实际上归结为对控制器的设计,这项工作称为对控制系统的校正。在实际过程中,既要理论指导,也要重视实践经验,往往还要配合许多局部和整体的试验。所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,使系统整个特性发生变化,从而满足给定的各项性能指标。工程实践中常用的校正方法,串联校正、反馈校正和复合校正。6.1系统的设计与校正问题6.1.1控制系统的性能指标时域指标稳态型别、静态误差系数动态超调、调整时间频域指标开环频率增益穿越频率、幅值裕度和相位裕度167
167 第六章 控制系统的校正 前面几章中讨论了控制系统几种基本方法。掌握了这些基本方法,就 可以对控制系统进行定性分析和定量计算。本章讨论另一命题,即如何根 据系统预先给定的性能指标,去设计一个能满足性能要求的控制系统。基 于一个控制系统可视为由控制器和被控对象两大部分组成,当被控对象确 定后,对系统的设计实际上归结为对控制器的设计,这项工作称为对控制 系统的校正。 在实际过程中,既要理论指导,也要重视实践经验,往往还要配合许多局 部和整体的试验。所谓校正,就是在系统中加入一些其参数可以根据需要 而改变的机构或装置,使系统整个特性发生变化,从而满足给定的各项性 能指标。工程实践中常用的校正方法,串联校正、反馈校正和复合校正。 6.1 系统的设计与校正问题 6.1.1 控制系统的性能指标 时域指标 稳态 型别、静态误差系数 动态 超调、调整时间 频域指标 开环频率 增益穿越频率、幅值裕度和相位裕度
闭环频率谐振峰值、谐振频率目前,工业技术界多习惯采用频率法,故通常通过近似公式进行两种指标的互换。参见书p220(1)二阶系统频域指标与时域指标的关系V21(6-1)谐振峰值M05~0.707225/1-g2谐振频率の,=の,/1-2%2(6-2)带宽频率=0n1-22+/(1-22)2+1(6-3)截止频率0。=0,(44+1-2≤2(6-4)25(6-5)相位裕度=arctgVV454+1-252元C超调量c%=e高×100%(6-6)73.5(6-7)调节时间ts=OctsEontgy(2)高阶系统频域指标与时域指标1(6-8)谐振峰值M,=sin(6-9)超调量α=0.16+0.4(M,-1)1≤M,≤1.8调节时间,=K(6-10)0.K = 2 +1.5(M, -1)+2.5(M, -1)21≤M,≤1.8168
168 闭环频率 谐振峰值、谐振频率 目前,工业技术界多习惯采用频率法,故通常通过近似公式进行两种指标 的互换。参见书 p220 (1)二阶系统频域指标与时域指标的关系 谐振峰值 0.707 2 2 0 2 1 1 2 − = Mr (6-1) 谐振频率 2 r = n 1− 2 (6-2) 带宽频率 1 2 (1 2 ) 1 2 2 2 b =n − + − + (6-3) 截止频率 4 2 c =n (4 +1 − 2 (6-4) 相位裕度 4 2 4 1 2 2 + − = arctg (6-5) 超调量 % 100% 2 1 = − − e (6-6) 调节时间 n S t 3.5 = tg t c S 7 = (6-7) (2)高阶系统频域指标与时域指标 谐振峰值 sin 1 Mr = (6-8) 超调量 = 0.16 + 0.4(Mr −1) 1 Mr 1.8 (6-9) 调节时间 c s K t = (6-10) 2 1.5( 1) 2.5( 1) 1 1.8 2 K = + M r − + M r − M r
6.1.2系统带宽的选择带宽频率是一项重要指标。既能以所需精度跟踪输入信号,又能拟制噪声扰动信号。在控制系统实际运行中,输入信号一般是低频信号,而噪声信号是高频信号。如果输入信号的带宽为0-0M则(6-11)0,=(5 ~10)0MdB + L(o)[D(jo)](jo)l 00.707(j0)-带宽LOb0..输入信号干扰信号[R(jo)][N(jo)0001OMOn图6-1系统带宽的选择169
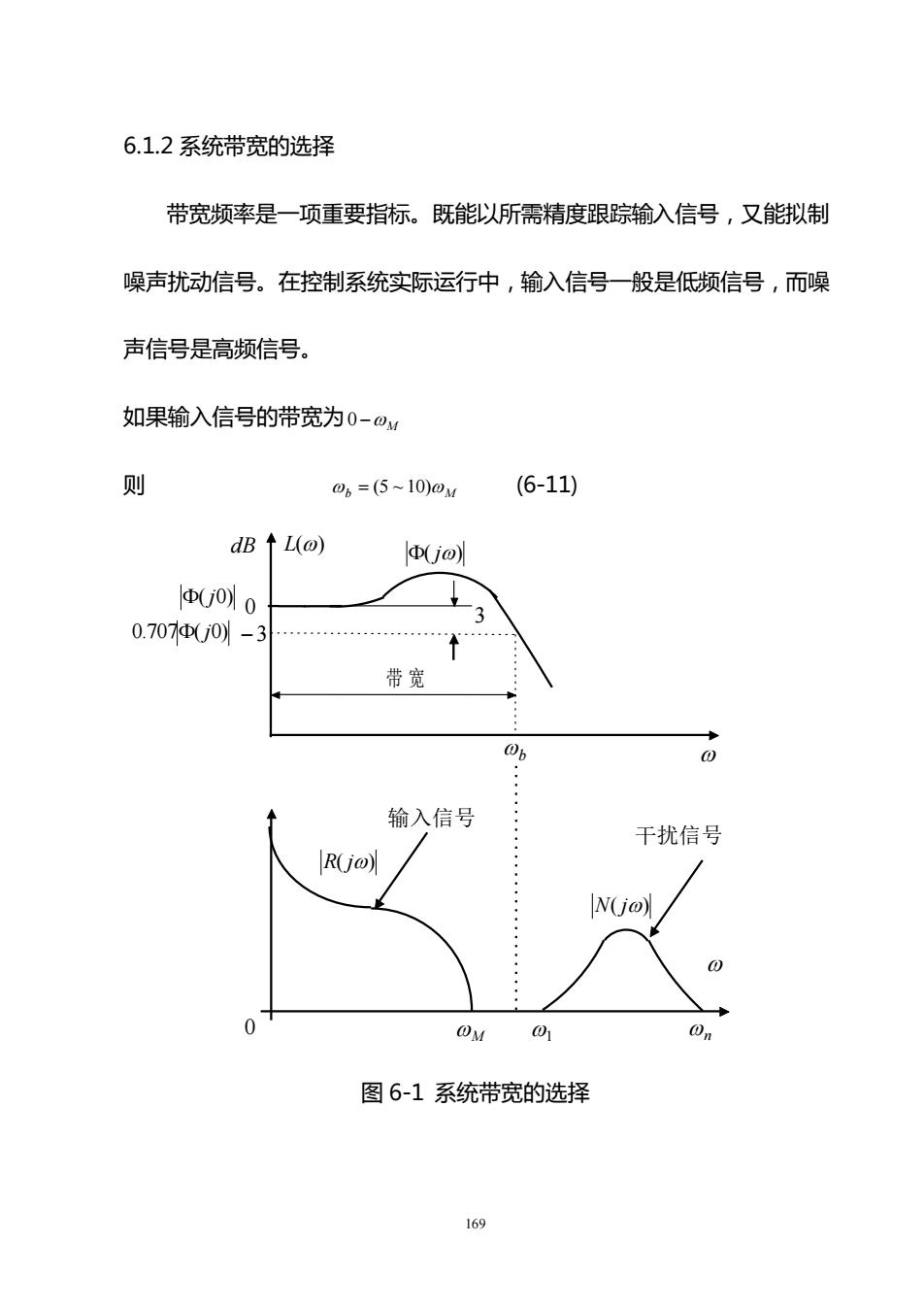
169 6.1.2 系统带宽的选择 带宽频率是一项重要指标。既能以所需精度跟踪输入信号,又能拟制 噪声扰动信号。在控制系统实际运行中,输入信号一般是低频信号,而噪 声信号是高频信号。 如果输入信号的带宽为 0 − M 则 b = (5 ~ 10) M (6-11) dB L() 0 带 宽 b 3 −3 0 M 1 n ( j) R( j) N( j) ( j0) 0.707(j0) 输入信号 干扰信号 图 6-1 系统带宽的选择
6.1.3校正方式串联校正一般接在系统误差测量点之后和放大器之前,串联接于系统前向通道之中反馈校正接在系统局部反馈通路中前馈校正又称顺馈校正。单独作用于开环控制系统,也可作为反馈控制系统的附加校正而组成复合控制系统。复合校正在反馈控制回路中,加入前馈校正通路,组成有机整体。R(s)E(s)C(s)G.(s)G,(s)H(s)(a)串联校正R(s)E(s)C(s)G(s)G.(s)H(s)(b)反馈校正170
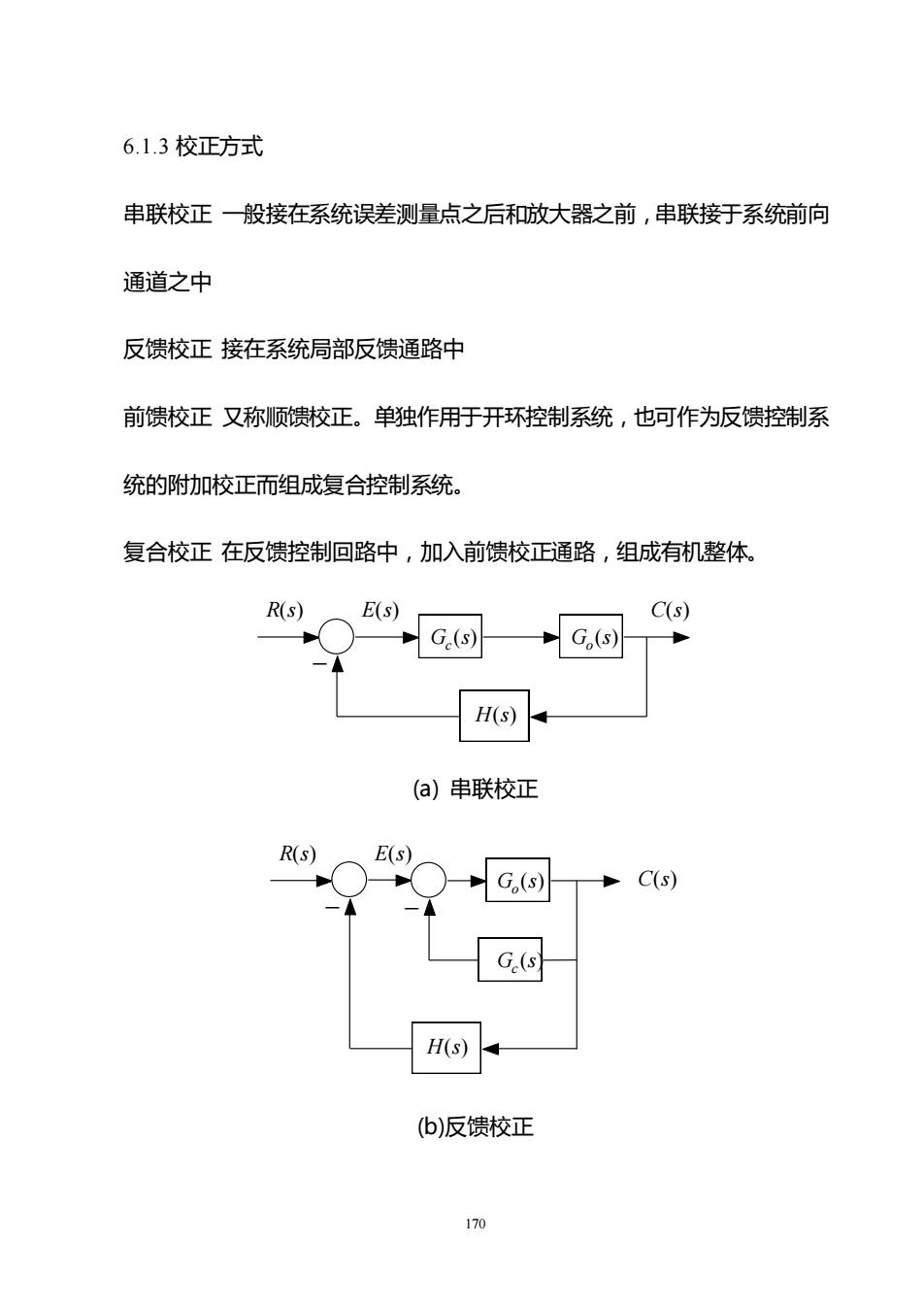
170 6.1.3 校正方式 串联校正 一般接在系统误差测量点之后和放大器之前,串联接于系统前向 通道之中 反馈校正 接在系统局部反馈通路中 前馈校正 又称顺馈校正。单独作用于开环控制系统,也可作为反馈控制系 统的附加校正而组成复合控制系统。 复合校正 在反馈控制回路中,加入前馈校正通路,组成有机整体。 R(s) C(s) G(s) H(s) E(s) G (s) c − G (s) o (a) 串联校正 R(s) C(s) H(s) E(s) G (s) o − G (s) c − (b)反馈校正
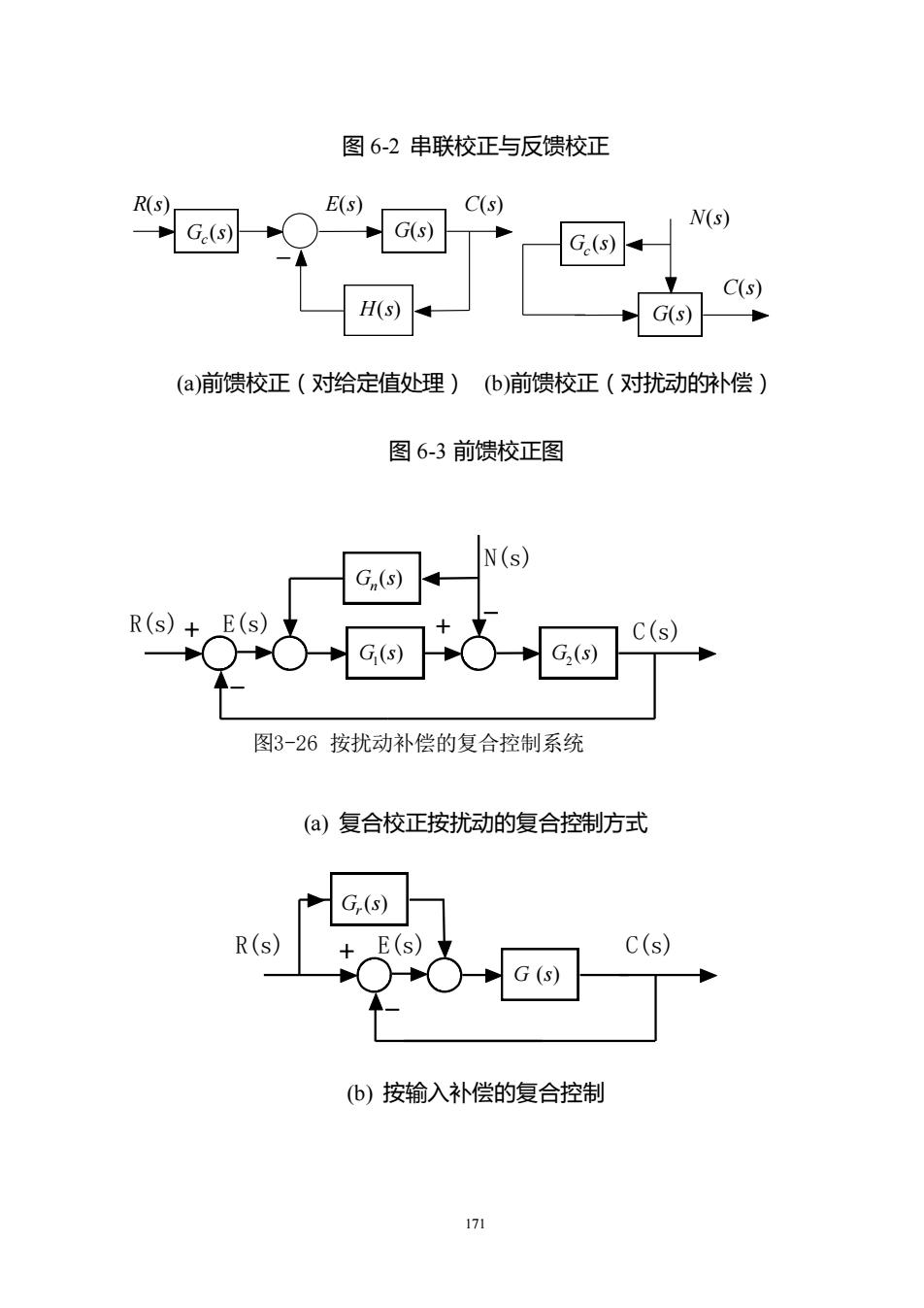
图6-2串联校正与反馈校正E(s)C(s)R(s)N(s)G(s)G.(s)G.(s)C(s)H(s)G(s)(a)前馈校正(对给定值处理)(b)前馈校正(对扰动的补偿)图6-3前馈校正图N(s)G,(s)R(s)ECSC(s)G(S图3-26按扰动补偿的复合控制系统(a)复合校正按扰动的复合控制方式G,(s)R(s)C(s)E(s)+G (s)(b)按输入补偿的复合控制171
171 图 6-2 串联校正与反馈校正 R(s) C(s) G(s) H(s) E(s) G(s) − G (s) c C(s) G(s) N(s) G(s) G (s) c (a)前馈校正(对给定值处理) (b)前馈校正(对扰动的补偿) 图 6-3 前馈校正图 + - - R(s) E(s) + N(s) C(s) 图3-26 按扰动补偿的复合控制系统 ( ) 2 ( ) G s 1 G s G (s) n (a) 复合校正按扰动的复合控制方式 + - R(s) E(s) C(s) G (s) G (s) r (b) 按输入补偿的复合控制