6.3串联校正6.3.1串联超前校正(基于频率响应法)用频率法对系统进行校正的基本思路是:通过所加校正装置,改变系统开环频率特性的形状,即要求校正后系统的开环频率特性具有如下特点:①低频段的增益充分大,满足稳态精度的要求;②中频段的幅频特性的斜率为-20dB/dec,并具有较宽的频带,这一要求是为了系统具有满意的动态性能;③高频段要求幅值迅速衰减,以较少噪声的影响。用频率法对系统进行超前校正的基本原理,是利用超前校正网络的相位超前特性来增大系统的相位裕量,以达到改善系统瞬态响应的目点。为此,要求校正网络最大的相位超前角出现在系统的截止频率(剪切频率)处。对截止频率没有特别要求时。用频率法对系统进行串联超前校正的一般步骤可归纳为:①根据稳态误差的要求,确定开环增益K。②根据所确定的开环增益K,画出未校正系统的波特图,计算未校正系183
183 6.3 串联校正 6.3.1 串联超前校正(基于频率响应法) 用频率法对系统进行校正的基本思路是:通过所加校正装置,改变系 统开环频率特性的形状,即要求校正后系统的开环频率特性具有如下特点: 低频段的增益充分大,满足稳态精度的要求; 中频段的幅频特性的斜率为-20dB/dec,并具有较宽的频带,这一要求是 为了系统具有满意的动态性能; 高频段要求幅值迅速衰减,以较少噪声的影响。 用频率法对系统进行超前校正的基本原理,是利用超前校正网络的相 位超前特性来增大系统的相位裕量,以达到改善系统瞬态响应的目点。为 此,要求校正网络最大的相位超前角出现在系统的截止频率(剪切频率) 处。 对截止频率没有特别要求时。 用频率法对系统进行串联超前校正的一般步骤可归纳为: 根据稳态误差的要求,确定开环增益 K。 根据所确定的开环增益 K,画出未校正系统的波特图,计算未校正系
统的相位裕度。③根据截止频率の的要求,计算超前网络参数a和T关键是选择最大超前角频率等于要求的系统截止频率,即㎡=の°,以保证系统的响应速度,并充分利用网络的相角超前特性。显然,のm=の°成立的条件是(6-35)- L,(o*) = L.(o.)= 10lg a1由上式可求出a T:(6-36)OmVa由(6-36)求出T。④验证已校正系统的相位裕度"。③由给定的相位裕度值计算超前校正装置提供的相位超前量?,即←补偿β=m=不给定的校正前是用于补偿因超前校正装置的引入,使系统截止频率增大而增加的相角滞后量。ε值通常是这样估计的:如果未校正系统的开环对数幅频特性在截止频率处的斜率为-40dB/dec,一般取s=5°~10°;如果为-60dB/dec则取=15°~20°。1+sin m④根据所确定的最大相位超前角?按a=(6-37)-sinm算出a的值。184
184 统的相位裕度 。 根据截止频率 c 的要求,计算超前网络参数 a 和 T;关键是选择最大 超前角频率等于要求的系统截止频率,即 m c = ,以保证系统的响应速度, 并充分利用网络的相角超前特性。显然, m c = 成立的条件是 − Lo (c ) = Lc (c ) =10lg a (6-35) 由上式可求出 a a T m 1 = (6-36) 由(6-36)求出T。 验证已校正系统的相位裕度 。 由给定的相位裕度值 ,计算超前校正装置提供的相位超前量 ,即 补偿 给定的 校正前 = = − + m 是用于补偿因超前校正装置的引入,使系统截止频率增大而增加的相 角滞后量。 值通常是这样估计的:如果未校正系统的开环对数幅频特性在 截止频率处的斜率为-40dB/dec,一般取 = 5 ~10 ;如果为-60dB/dec 则取 =15 ~ 20。 根据所确定的最大相位超前角 m 按 m m a 1 sin 1 sin − + = (6-37) 算出 a 的值

③计算校正装置在の㎡处的幅值10lga(图6-10)。由未校正系统的对数幅频特性曲线,求得其幅值为-10lga处的频率,该频率の,就是校正后系统的开环截止频率o°,即o°=のm。③确定校正网络的转折频率の和の2。0 = : 02=0m aVa①画出校正后系统的波特土并演算相位裕度时候满足要求?如果不满足,则需增大?值,从第③步,开始重新进行计算。4K例6-1.某一单位反馈系统的开环传递函数为G(s)=,设计一个超s(s + 2)前校正装置,使校正后系统的静态速度误差系数K,=20s-1,相位裕度≥50°,增益裕度20lgh不小于10dB。解:①根据对静态速度误差系数的要求,确定系统的开环增益K。4KK=10K, = lim s=2K=20,s>0 s(s+2)当K=10时,未校正系统的开环频率特性为4020-90°-arctg WG(jo) =jo(j+2)/1+(9)②绘制未校正系统的伯特图,如图6-16中的蓝线所示。由该图可知未185
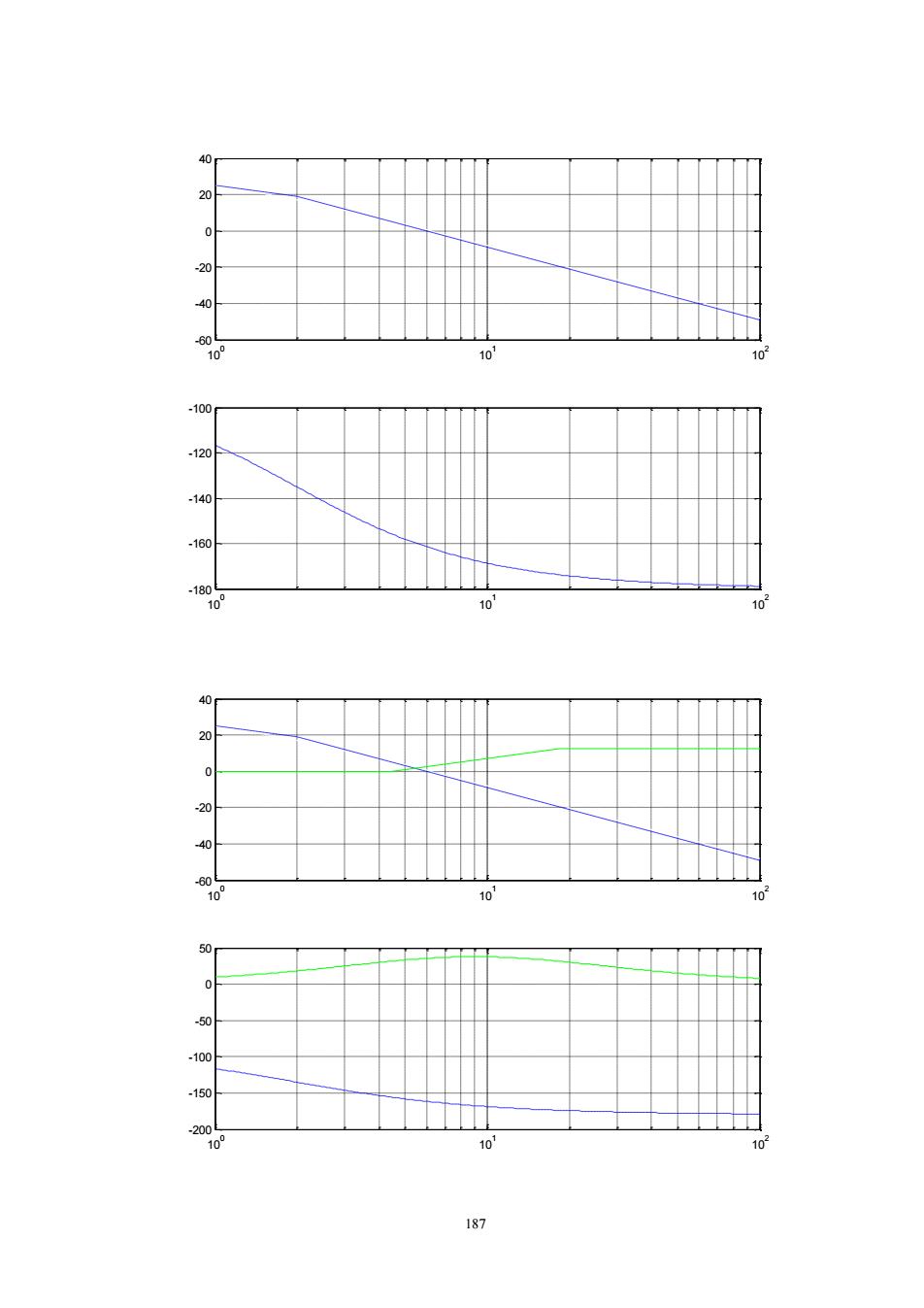
185 计算校正装置在 m 处的幅值 10lga (图 6-10)。由未校正系统的对数幅 频特性曲线,求得其幅值为-10lga 处的频率,该频率 m 就是校正后系统的 开环截止频率 c ,即 c = m 。 确定校正网络的转折频率 1和2。 a m 1 = ,2 = m a 画出校正后系统的波特土,并演算相位裕度时候满足要求?如果不满 足,则需增大 值,从第步,开始重新进行计算。 例6-1.某一单位反馈系统的开环传递函数为 ( 2) 4 ( ) + = s s K G s ,设计一个超 前校正装置,使校正后系统的静态速度误差系数 1 20 − K = s v ,相位裕度 50, 增益裕度 20lg h 不小于 10dB。 解:根据对静态速度误差系数的要求,确定系统的开环增益 K。 2 20 ( 2) 4 lim 0 = = + = → K s s K K s s v , K =10 当 K =10 时,未校正系统的开环频率特性为 2 90 ) 2 1 ( 20 ( 2) 40 ( ) 2 arctg j j G j − − + = + = 绘制未校正系统的伯特图,如图 6-16 中的蓝线所示。由该图可知未
校正系统的相位裕度为=17*也可计算20= 1 0= 6.17 = 17.960 /1+(-)3③根据相位裕度的要求确定超前校正网络的相位超前角Φ=-1+6=50°-17°+5°=3801+sinPm_1+sin380④由式(6-37)知= 4.2Ia=1-sinPm1-sin380③超前校正装置在㎡处的幅值为10lga=10lg4.2=6.2dB,据此,在为校正系统的开环对数幅值为-6.2dB对应的频率の=0㎡m=9s-l,这一频率就是校正后系统的截止频率Q+0*也可计算20lg20-20g0-20lg/1+-6.240=8.93186
186 校正系统的相位裕度为 = 17 *也可计算 1 ) 2 1 ( 20 2 = + = 6.17 = 17.96 根据相位裕度的要求确定超前校正网络的相位超前角 = − + = 50 −17 + 5 = 38 1 由式(6-37)知 4.2 1 sin 38 1 sin 38 1 sin 1 sin = − + = − + = m m a 超前校正装置在 m 处的幅值为 10lg a = 10lg 4.2 = 6.2dB ,据此,在为校正系统的开环对数幅值为− 6.2dB 对应的频率 1 9 − =m = s ,这一频率就是校正后系统的截止频率 c *也可计算 6.2 4 20lg 20 20lg 20lg 1 2 − − + = − = 8.93
40200-20-40-6010'10°10-100-120F-140-160-18010'10°1040200-20-40-6010°1010500-50-100-150-20010010'10187
187 100 101 102 -60 -40 -20 0 20 40 100 101 102 -180 -160 -140 -120 -100 100 101 102 -60 -40 -20 0 20 40 100 101 102 -200 -150 -100 -50 0 50