1.1 引言3、反馈调节系统稳定性问题的研究:V1868英国物理学家麦克斯韦发表了“论调速器”的论文,首次论述该问题(二三阶系统的稳定判据V1895英国劳斯判据和德国数学家赫尔维茨的代数稳定条件V1893李雅普诺夫基于非线性运李雅普诺夫动的一般运动稳定问题4、反馈控制系统的频率特性研究:20世纪20年代,电子管放大器以及远距离通话的实现,研究如何减少放大倍数增大而导致信号失真的问题。美国贝尔电话实验室的工程师和科学家们逐步建立了反馈控制系统的频率特性分析方法
1.1 引言 3、反馈调节系统稳定性问题的 研究: ✓1868英国物理学家麦克斯韦发 表了“论调速器”的论文,首 次论述该问题。 ✓二三阶系统的稳定判据。 ✓1895英国劳斯判据和德国数学 家赫尔维茨的代数稳定条件; ✓1893李雅普诺夫基于非线性运 动的一般运动稳定问题。 4、反馈控制系统的频率特性研究:20世纪20年代,电子管 放大器以及远距离通话的实现,研究如何减少放大倍数增大 而导致信号失真的问题。美国贝尔电话实验室的工程师和科 学家们逐步建立了反馈控制系统的频率特性分析方法。 李雅普诺夫
1.1 引言5、积分和微分控制的思想:1922年俄裔美国工程师米诺斯基在分析船舶驾驶控制系统的稳定性时首次提出。800.06、1934年美国麻省理工的赫曾教授创立800.0了伺服控制理论,首次提出轨迹跟踪在反馈控制中的重要性:AL7、1936年英国工程师考伦德:温度控制系统的PID控制器8、1942年美国工程师:PID参数整定准则c至今仍适用:现代PID控制器9、二战期间及战后10年:美国电信工程师伊万斯给出控制系统的图解分析法和根轨迹综合法,创立根轨迹法的完整理论
1.1 引言 5、积分和微分控制的思想:1922年俄裔 美国工程师米诺斯基在分析船舶驾驶控制 系统的稳定性时首次提出。 6、1934年美国麻省理工的赫曾教授创立 了伺服控制理论,首次提出轨迹跟踪在反 馈控制中的重要性; 7、1936年英国工程师考伦德:温度控制 系统的PID控制器; 8、1942年美国工程师:PID参数整定准则, 至今仍适用; 9、二战期间及战后10年:美国电信工程 师伊万斯给出控制系统的图解分析法和根 轨迹综合法,创立根轨迹法的完整理论。 现代PID控制器
1.1引言10、1948年美国数学家维纳出版专著“控制论”。1956年我国科学家钱学森出版“工程控制论”11、20世纪50年代,人造卫星和空间技术的发展,成为自动控制理论新的发展推动力。极大值原理、动态规划理论、状态空间方法、多变量最优控制和最优滤波理论。12、20世纪70年代,随着大规模集成BRHB美能30中的光保机无先A电路数字计算机的发展,推动了控制BRMITR器应用高级控制算法的能力。1500413、出现若干控制理论分支:系统辨a9识、鲁棒控制、协调控制、智能控制中国探月计创首期国标盗卫发射多示享片等等
1.1 引言 10、1948年美国数学家维纳出版专著 “控制论” 。1956年我国科学家钱学 森出版“工程控制论” 。 11、20世纪50年代,人造卫星和空间 技术的发展,成为自动控制理论新的 发展推动力。极大值原理、动态规划 理论、状态空间方法、多变量最优控 制和最优滤波理论。 12、20世纪70年代,随着大规模集成 电路数字计算机的发展,推动了控制 器应用高级控制算法的能力。 13、出现若干控制理论分支:系统辨 识、鲁棒控制、协调控制、智能控制 等等
1.1引言1.1.2控制工程实践自动化的核心是控制与系统,控制工程实践是实现自动化的手段。自动化最草出现在汽车工业,其初始概念是指在工业生产(加工制造等)蒄程采角旨动控制代替人工控制。1947年美国福特公司正式使用自动化一词其含义是指加工采用连续方式,生产过程流水式的自动进行。从20世纪70年代开始,我国通过陆续引进国外成套自动化生产线,我国工业生产逐步从局部自动化,发展成今天的全方位、全流程的综合自动化我国的自动化学术组织:中息华学会1961年成立,第一届理事长钱学森院
1.1 引言 1.1.2 控制工程实践 ❖ 自动化的核心是控制与系统,控制工程实践 是实现自动化的手段。自动化最早出现在汽 车工业,其初始概念是指在工业生产(加工、 制造等)过程中采用自动控制代替人工控制。 ❖ 1947年美国福特公司正式使用自动化一词, 其含义是指加工采用连续方式,生产过程流 水式的自动进行。 ❖ 从20世纪70年代开始,我国通过陆续引进国 外成套自动化生产线,我国工业生产逐步从 局部自动化,发展成今天的全方位、全流程 的综合自动化。 ❖ 我国的自动化学术组织:中国自动化学会, 1961年成立,第一届理事长钱学森院士
1.2自动控制的基本原理人工控制1.2.1人工控制与自动控制1)操作员将期望的液位值(即水位高度)记在天脑中:2)操作员用眼读取实际液位值:3操作员将液位期望值与实际值义比较得出偏差值:进水阀进水4)操作员根据偏差的大小和性质水池(正负性),决定如何通过用出水阀手打开或关闭阀门的方式来调出水节经过阀门的水量大小,达到维持液位恒定的控制目标人工控制:人工控制是人工操作实现:测量、求误差、控制、再测量、再求误差、再控制的循环过程
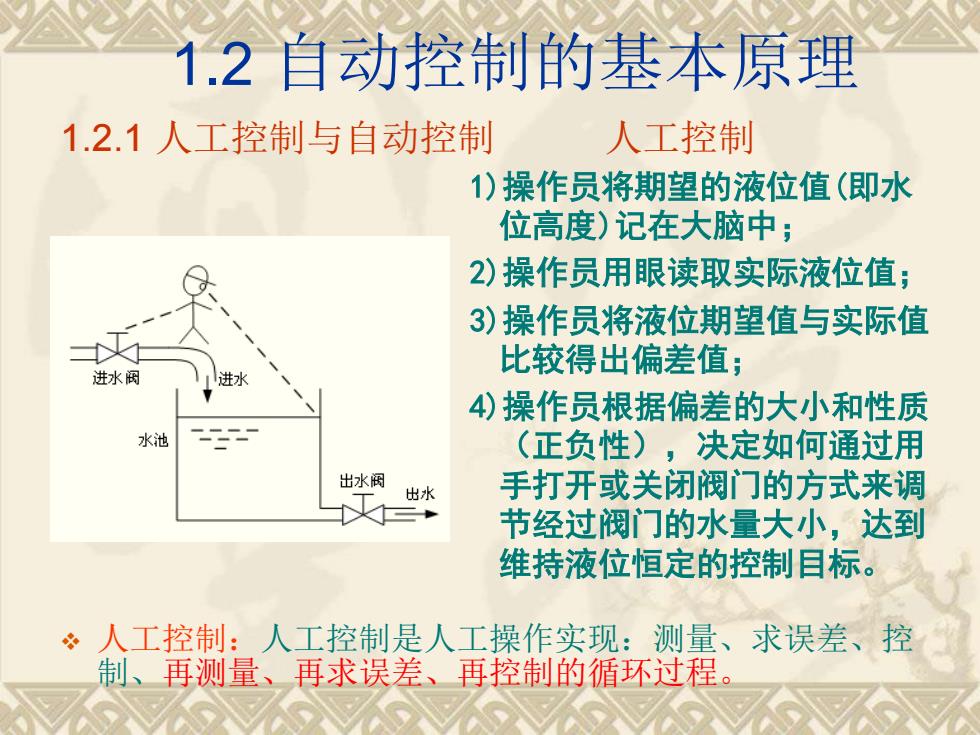
1.2.1 人工控制与自动控制 人工控制 ❖ 人工控制:人工控制是人工操作实现:测量、求误差、控 制、再测量、再求误差、再控制的循环过程。 1.2 自动控制的基本原理 1)操作员将期望的液位值(即水 位高度)记在大脑中; 2)操作员用眼读取实际液位值; 3)操作员将液位期望值与实际值 比较得出偏差值; 4)操作员根据偏差的大小和性质 (正负性),决定如何通过用 手打开或关闭阀门的方式来调 节经过阀门的水量大小,达到 维持液位恒定的控制目标