控制系统的稳定性及特性3.1引言3.2反馈控制系统的结构及其传递函数3.3闭环系统的稳定性3.4反馈控制系统的特性3.5复杂反馈控制系统的基本结构及其特性
控制系统的稳定性及特性 3.1 引言 3.2 反馈控制系统的结构及其传递函数 3.3 闭环系统的稳定性 3.4 反馈控制系统的特性 3.5 复杂反馈控制系统的基本结构及其特性
知识体系控制系统的结构及其传递函数闭环系统的稳定性反馈控制系统反馈控制系统的特性复杂反馈控制系统的基本结构及其特性
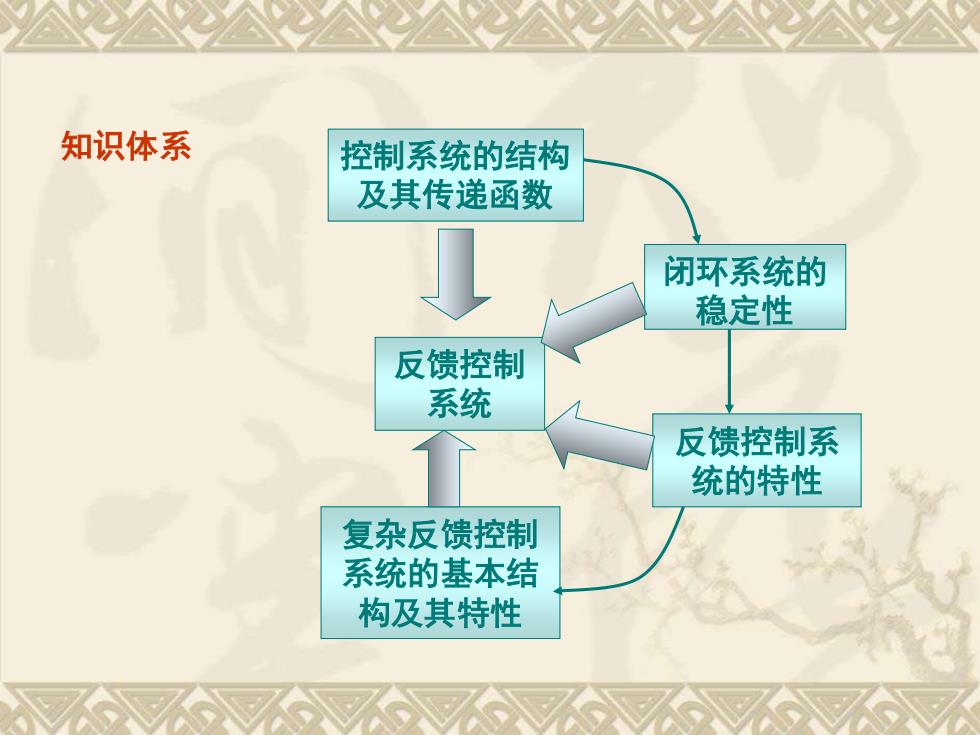
控制系统的结构 及其传递函数 闭环系统的 稳定性 反馈控制系 统的特性 复杂反馈控制 系统的基本结 构及其特性 反馈控制 系统 知识体系
3.1引言一般来讲,根据应用的需求或者对象本身的特性,被控对象既可以是稳定的也可以是不稳定的。反馈控制系统的典型结构和常用传递函数如何定义系统的稳定性?如何判定系统的稳定?反馈控制系统的特性如何?有什么优势?
3.1引言 ❖ 一般来讲,根据应用的需求或者对象本身的 特性,被控对象既可以是稳定的也可以是不 稳定的。 ❖ 反馈控制系统的典型结构和常用传递函数。 ❖ 如何定义系统的稳定性? ❖ 如何判定系统的稳定? ❖ 反馈控制系统的特性如何?有什么优势?
3.2反馈控制系统的结构及其传递函数D(s)R(s)Y(s)典型的反馈控制系统E(s)XGe(s)n(sB(s)H(s)3.2.1开环传递函数R(s)E(S)Y(s)+Gp(s)Gc(s)8系统开环传递函数定:B(s)H(s)B(s)G,(s) == G.(s)G,(s)H(s)(3-1)R(s)将反馈通道H(s)输出断开后前向通道传递函数反馈通道传递函数
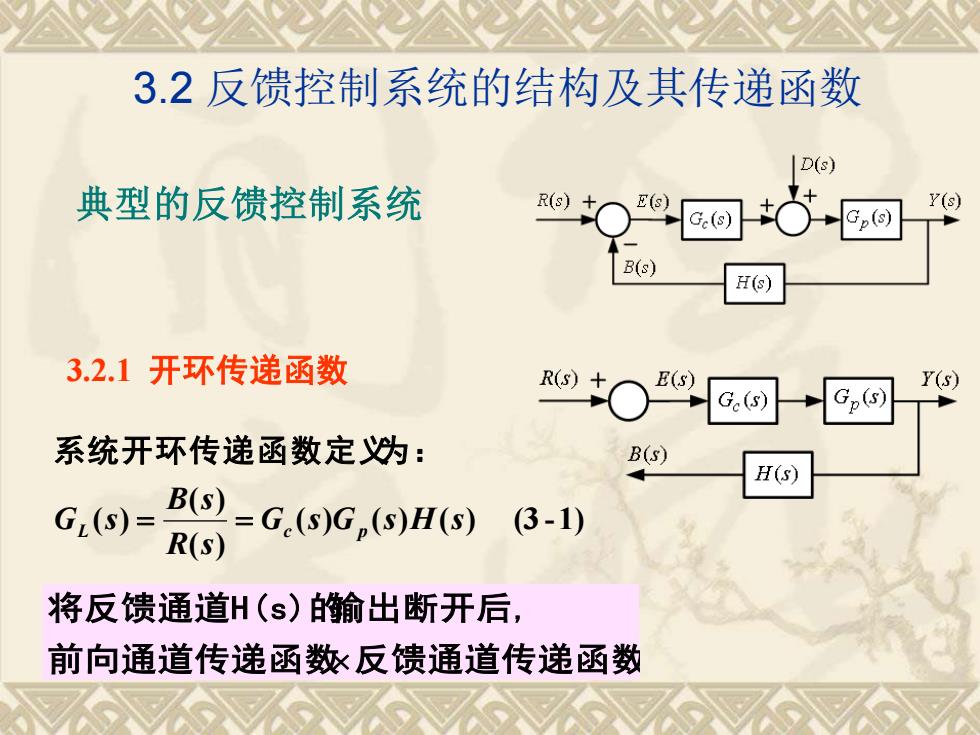
3.2 反馈控制系统的结构及其传递函数 典型的反馈控制系统 前向通道传递函数 反馈通道传递函数 将反馈通道H(s)的输出断开后, ( ) ( ) ( ) (3 -1) ( ) ( ) ( ) G s G s H s R s B s G s L = = c p 系统开环传递函数定义为 : 3.2.1 开环传递函数
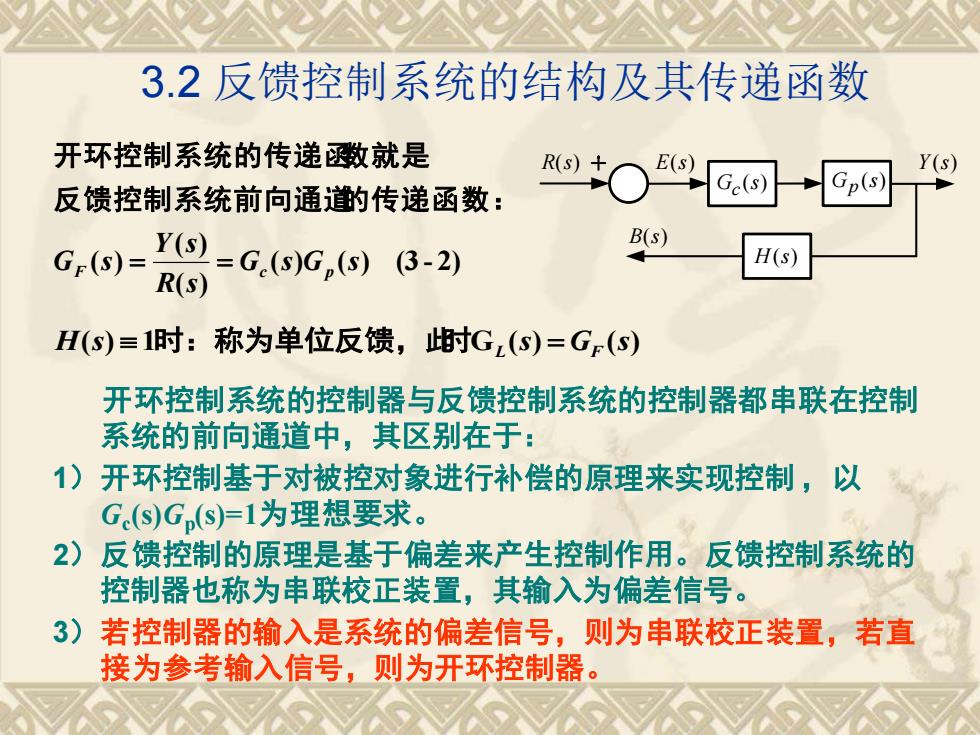
3.2反馈控制系统的结构及其传递函数开环控制系统的传递函效就是R(s)E(s)Y(S+Gp(s)Gc(s)反馈控制系统前向通道的传递函数B(s)Y(s)H(s)= G(s)G,(s)(3-2)Gr(s) =R(s)H(s)=1时:称为单位反馈,时G(s)=Gr(s)开环控制系统的控制器与反馈控制系统的控制器都串联在控制系统的前向通道中,其区别在于:1)开环控制基于对被控对象进行补偿的原理来实现控制,以G(s)Gp(s)=1为理想要求。2)反馈控制的原理是基于偏差来产生控制作用。反馈控制系统的控制器也称为串联校正装置,其输入为偏差信号。3若控制器的输入是系统的偏差信号,则为串联校正装置,若直接为参考输入信号,则为开环控制器
3.2 反馈控制系统的结构及其传递函数 ( ) ( ) (3 - 2) ( ) ( ) ( ) G s G s R s Y s G s F = = c p 反馈控制系统前向通道的传递函数: 开环控制系统的传递函数就是 H(s) 1 G (s) G (s) 时:称为单位反馈,此时 L = F 开环控制系统的控制器与反馈控制系统的控制器都串联在控制 系统的前向通道中,其区别在于: 1)开环控制基于对被控对象进行补偿的原理来实现控制 ,以 Gc (s)Gp (s)=1为理想要求。 2)反馈控制的原理是基于偏差来产生控制作用。反馈控制系统的 控制器也称为串联校正装置,其输入为偏差信号。 3)若控制器的输入是系统的偏差信号,则为串联校正装置,若直 接为参考输入信号,则为开环控制器。 R(s) E(s) H(s) G (s) c Y(s) G (s) p B(s)