3.2反馈控制系统的结构及其传递函数3.2.2闭环传递函数1)给定输入作用下的闭环转递函数:令D(s0G.(s)G,(s)G.(s)G,(s)Y(s)(3-3)Tr(s) :R(s)1+G,(s)1+G.(s)G,(s)H(s)2)扰动输入作用下的闭环转递函数:令R(s)=0G,(s)G,(s)Y(s)(3-4)TD(s)D(s)1+G,(s)1+G.(s)G,(s)H(s)D(s) +Y(s)R(s)Y(s)E(s)+Gp(s)Gp(s)Gc(s)B(s)H(s)H(s)
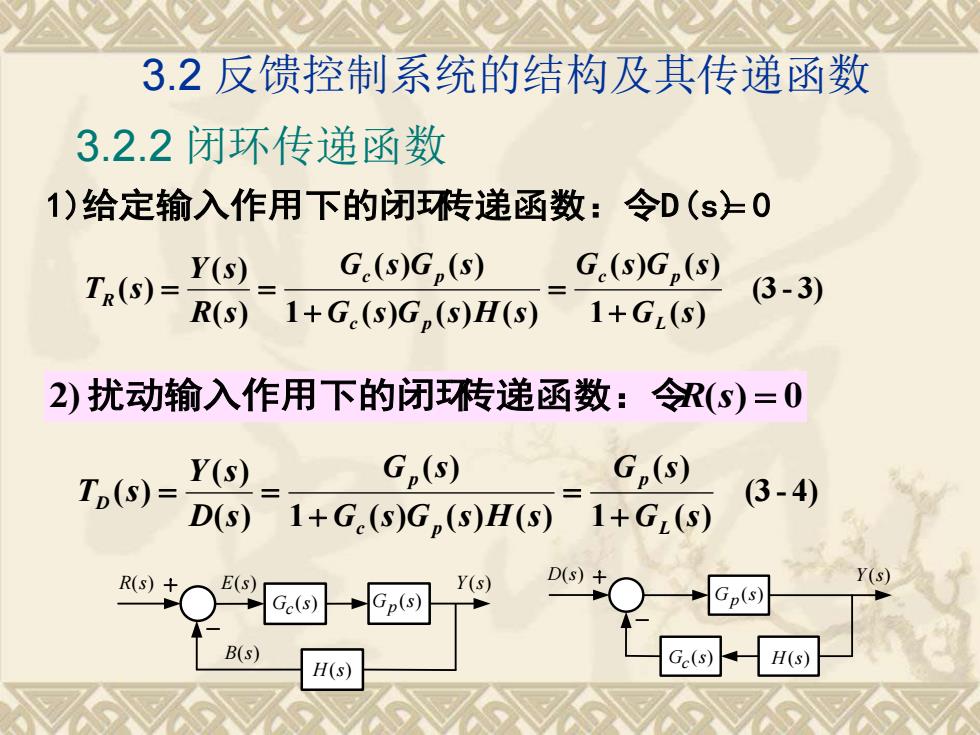
3.2 反馈控制系统的结构及其传递函数 3.2.2 闭环传递函数 1 )给定输入作用下的闭环传递函数:令D(s)= 0 (3 - 3) 1 ( ) ( ) ( ) 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) G s G s G s G s G s H s G s G s R s Y s T s L c p c p c p R + = + = = 2)扰动输入作用下的闭环传递函数:令R(s) = 0 (3 - 4) 1 ( ) ( ) 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) G s G s G s G s H s G s D s Y s T s L p c p p D + = + = = R(s) E(s) H(s) G (s) c Y(s) G (s) p B(s) H(s) D(s) Y(s) G (s) p G (s) c
3.2反馈控制系统的结构及其传递函数参考输入和干扰输入同时作用下系统的总输出:两种情况的线性叠加结果为G,(s)D(s)G(s)G,(s)R(s)T,(s)D(s) =Tr(s)R(s) =1+G,(s)1+G,(s)G.(s)G, (s)R(s) + G,(s)D(s)(3-5)Y(s) = Tr(s)R(s) + T,(s)D(s) =1+G,(s)R(s) +Y(s)Y(s)E(s)D(s)+Gp(s)Gc(s)p(s)B(s)H(s)H(s)Gc(s)闭环是实现了负反馈还是正反馈由信号B(s)进入相加点的符号和G(s)的符号共同决定。闭环系统可能是负反馈系统,也可能为正反馈系统
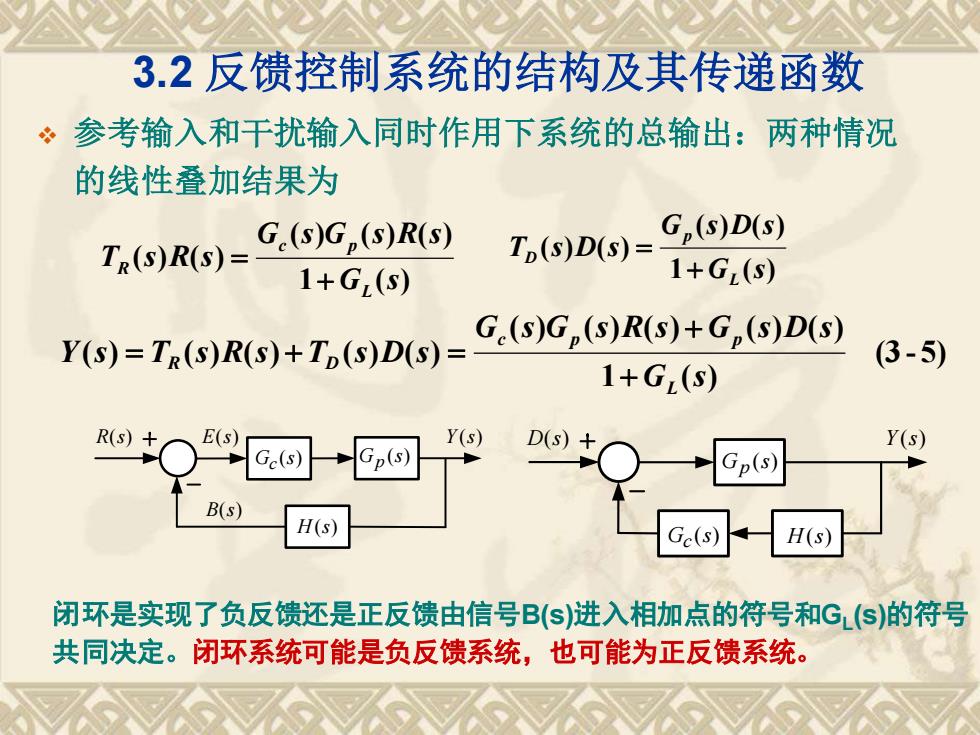
3.2 反馈控制系统的结构及其传递函数 ❖ 参考输入和干扰输入同时作用下系统的总输出:两种情况 的线性叠加结果为 (3 - 5) 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) G s G s G s R s G s D s Y s T s R s T s D s L c p p R D + + = + = 1 ( ) ( ) ( ) ( ) ( ) G s G s D s T s D s L p D + = 1 ( ) ( ) ( ) ( ) ( ) ( ) G s G s G s R s T s R s L c p R + = 闭环是实现了负反馈还是正反馈由信号B(s)进入相加点的符号和GL (s)的符号 共同决定。闭环系统可能是负反馈系统,也可能为正反馈系统。 R(s) E(s) H(s) G (s) c Y(s) G (s) p B(s) H(s) D(s) Y(s) G (s) p G (s) c
3.2反馈控制系统的结构及其传递函数3.2.3偏差传递函数偏差e(t)=给定输入信号r(t)一主反馈信号b(t)(3-6)其拉普拉斯变换为:E(s)=R(s)-B(s)(3-7)1)参考输入R(s)作D(s)用下的偏差传递函数R(s)Y(s)E(s)XGe(s)GE(s)SB(s)REH(s)R(s)11+G.(s)G,(s)H(s)R(s) +E(s)1(3 -8)HCS(S1+G,(s)
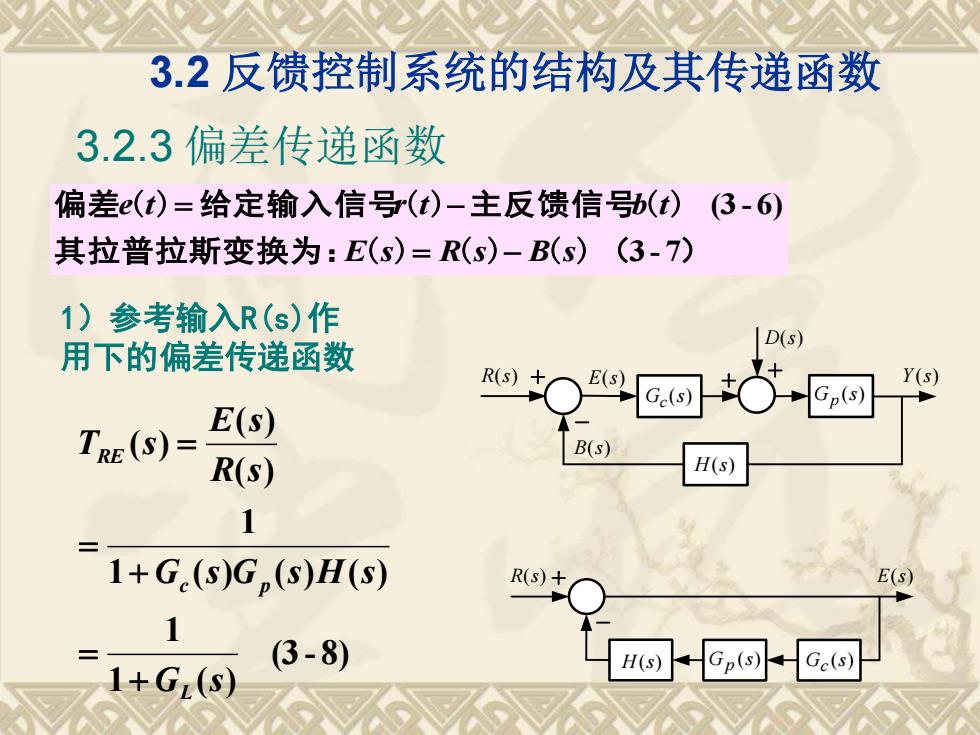
其拉普拉斯变换为: ( ) 偏 差 给定输入信号 主反馈信号 3 - 7 (3 - 6) ( ) ( ) ( ) ( ) ( ) ( ) E s R s B s e t r t b t = − = − 3.2 反馈控制系统的结构及其传递函数 3.2.3 偏差传递函数 (3 - 8) 1 ( ) 1 1 ( ) ( ) ( ) 1 ( ) ( ) ( ) G s G s G s H s R s E s T s L c p RE + = + = = 1)参考输入R(s)作 用下的偏差传递函数 R(s) E(s) H(s) G (s) c Y(s) G (s) p B(s) D(s) H(s) G (s) p R(s) E(s) G (s) c
3.2反馈控制系统的结构及其传递函数2)千扰输入D(s)作用下的偏差传递函数D(s)R(s) +Y(SE(s)E(s)G(s)Gp(s)Tpe(s)=D(s)B(s)H(s)-G,(s)H(s)1 +G.(s)G,(s)H(s)E(s)-G,(s)H(s)Gn(s)H(s)(3-9)1+G,(s)Gc(s)3)总偏差R(s) -G,(s)H(s)D(s)(3-10)E(s) = Tre (s)R(s) + Tpe(s)D(s) =1+G,(s)
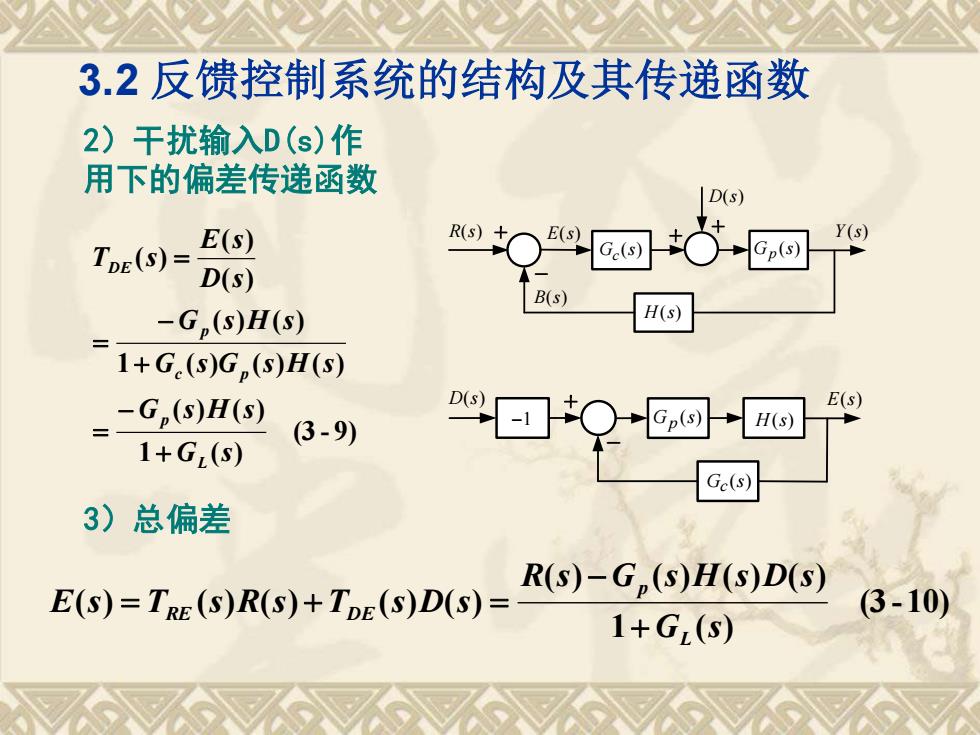
2)干扰输入D(s)作 用下的偏差传递函数 (3 - 9) 1 ( ) ( ) ( ) 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) G s G s H s G s G s H s G s H s D s E s T s L p c p p DE + − = + − = = (3 -10) 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) G s R s G s H s D s E s T s R s T s D s L p RE D E + − = + = 3)总偏差 3.2 反馈控制系统的结构及其传递函数 R(s) E(s) H(s) G (s) c Y(s) G (s) p B(s) D(s) D(s) E(s) G (s) c G (s) −1 p H(s)
3.2反馈控制系统的结构及其传递函数闭环传递函数各表达式的公共分母多项式均1+G.(s)G,(s)H(s)=1+G,(s)1+G,(s)=0 (3-11)特征多项式方程G.(s)= KNL(s)/D(s)若考虑多项式有理分式形式特征方程可写为:△(s)=D,(s)+K,N,(s)=0 (3-12)即最高阶项系数为1,而K,N.和D和均为首一多项式,自称为开环增益
3.2 反馈控制系统的结构及其传递函数 ❖ 闭环传递函数各表达式的公共分母多项式均 为: ❖ 特征多项式方程: 1+G (s) = 0 (3-11) L 1 G (s)G (s)H(s) 1 G (s) + c p = + L 若考虑多项式有理分式形式 G (s) K N (s) D (s) L = g L L (s) = D (s) + K N (s) = 0 (3 -12) 特征方程可写为: L g L NL和DL和均为首一多项式,即最高阶项系数为1,而Kg 称为开环增益