2问题的提出 山东理子大军 因此,在采用比例调节器控制的闭环系统中,输入偏差是维 系系统运行的基础,必然要产生静差,因此是有静差系统。 如果要消除系统误差,必须寻找其他控制方法,比如:采用 积分(Integration)调节器或比例积分(PI)调节器来代替 比例放大器。 口用P调节器代替P调节器后,可使系统稳定,并有足够的稳定 裕度,同时还能满足稳态精度指标。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 2 问题的提出 因此,在采用比例调节器控制的闭环系统中,输入偏差是维 系系统运行的基础,必然要产生静差,因此是有静差系统。 如果要消除系统误差,必须寻找其他控制方法,比如:采用 积分(Integration)调节器或比例积分(PI)调节器来代替 比例放大器。 用PI调节器代替P调节器后,可使系统稳定,并有足够的稳定 裕度,同时还能满足稳态精度指标
2问题的提出 山东我上大军 口带比例(P)】 放大器的反馈控制闭环调速系统是有静差的调 速系统。 口采用比例积分(P)调节器代替比例放大器后,构成无静差 调速系统。 口二者有何本质的区别?P调节器为何具有如此大的能力?其 控制规律又是怎样? 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 2 问题的提出 带比例(P)放大器的反馈控制闭环调速系统是有静差的调 速系统。 采用比例积分(PI)调节器代替比例放大器后,构成无静差 调速系统。 二者有何本质的区别? PI调节器为何具有如此大的能力?其 控制规律又是怎样?
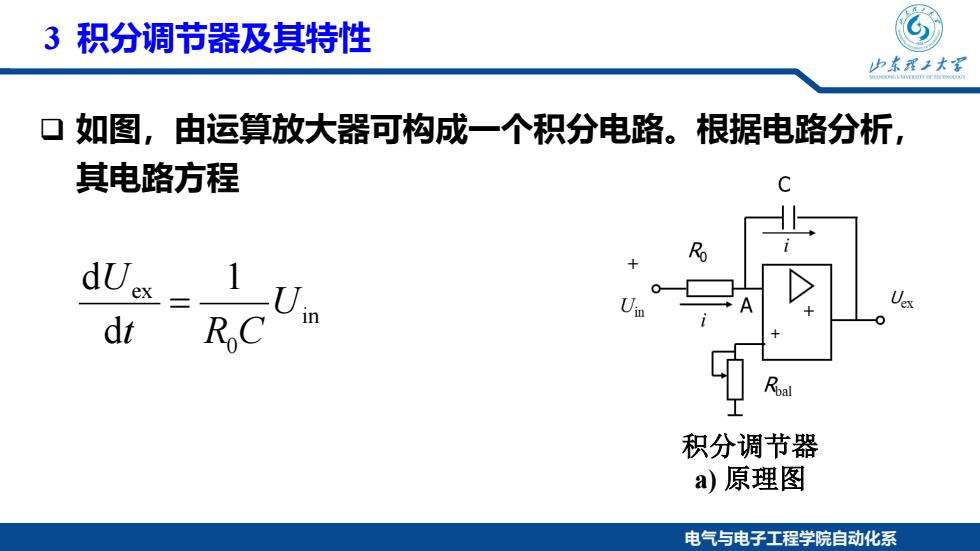
3积分调节器及其特性 少求理上大军 口如图,由运算放大器可构成一个积分电路。根据电路分析, 其电路方程 R Ues dt Roal 积分调节器 a)原理图 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 3 积分调节器及其特性 如图,由运算放大器可构成一个积分电路。根据电路分析, 其电路方程 in 0 ex 1 d d U t R C U = 积分调节器 a) 原理图

3积分调节器及其特性 山东程子大军 方程两边取积分,得 Ujd=Rc∫u.d-Ud 式中T=R,C一积分时间常数。 当初始值为零时,在阶跃输入作用下,对上式进行积分运 算,得积分调节器的输出 U x 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 3 积分调节器及其特性 方程两边取积分,得 ∫ ∫ ∫ = = U t = U t R C i t C U d 1 d 1 d 1 in in 0 ex τ 式中 — 积分时间常数。 当初始值为零时,在阶跃输入作用下,对上式进行积分运 算,得积分调节器的输出 τ = R0C t U U τ in ex =
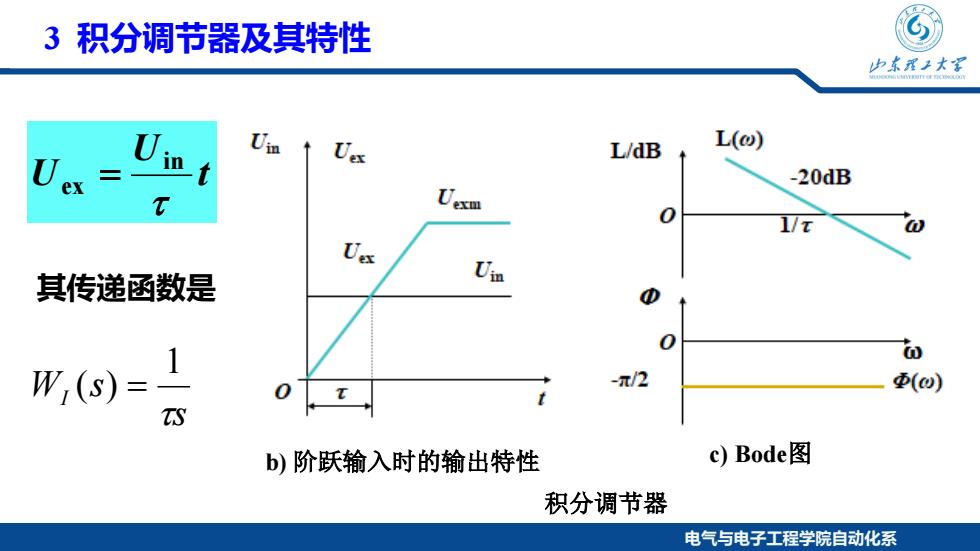
3积分调节器及其特性 山东程子大军 Uin L/dB L(@) -20dB T Uecm 1/t 其传递函数是 Uin 1 to W,(S)= -π/2 (o) S b)阶跃输入时的输出特性 c)Bode图 积分调节器 电气与电子工程学院自动化系
电气与电子工程学院自动化系 电气与电子工程学院自动化系 3 积分调节器及其特性 b) 阶跃输入时的输出特性 c) Bode图 积分调节器 t U U τ in ex = 其传递函数是 s W s I τ 1 ( ) =