线性系统的稳定性可以根据闭环极点在S平面内的位置来 确定。设单输入单输出线性系统的微分方程为,即 a,c+a-C+ac+ac (3.58) =+br(m++br+bor 则系统的稳定性由上式左端决定,或者说系统稳定性可 按齐次微分方程式 a,c+a-c++ac+ac=0 (3.59) 来分析。这时,在任何初始条件下,若满足 limc()=lim()==limc()=0 (3.60) >00
线性系统的稳定性可以根据闭环极点在S平面内的位置来 确定。设单输入单输出线性系统的微分方程为,即 (3.58) 则系统的稳定性由上式左端决定,或者说系统稳定性可 按齐次微分方程式 (3.59) 来分析。这时,在任何初始条件下,若满足 (3.60) ( ) ( 1) (1) 1 1 0 ( ) ( 1) (1) 1 1 0 n n n n m m m m a c a c a c a c b r b r b r b r − − − − + + + + = + + + + ( ) ( 1) (1) 1 1 0 n n n n a c a c a c a c − − + + + + = 0 (1) ( 1) lim ( ) lim ( ) lim ( ) n t t t c t c t c t − → → → = = = = 0

则称系统(3.58)是稳定的。 为了决定系统的稳定性,可求出式3.59)的解。由数学 分析知道,式(3.59)的特征方程式为 a,s”+an-++aS+4,=0 (3.61) 设上式有k个实根p,(i=1,2,,k),对共轭复数 根(0,±w)(户1,2,.,),+2r=n,则齐次方程式 (3.59)解的一般式为 c0=∑C,e+∑e/4,+B,sino,) (3.62) 式中系数A,B和C由初始条件决定。 从式(3.62)可知: (1)若卫,<0,-o,<0(即极点都具有负实部),则 式(360)成立,系统最终能恢复至平衡状态,所以系统是 稳定的
则称系统(3.58)是稳定的。 为了决定系统的稳定性,可求出式(3.59)的解。由数学 分析知道,式(3.59)的特征方程式为 (3.61) 设上式有k个实根-pi (i =1,2,…,k),r对共轭复数 根(-σj±jwj ) (j=1,2,…,r),k+2r = n,则齐次方程式 (3.59)解的一般式为 (3.62) 式中系数Aj,Bj和Cj由初始条件决定。 从式(3.62)可知: (1) 若−pi <0,−s j <0 (即极点都具有负实部),则 式(3.60)成立,系统最终能恢复至平衡状态,所以系统是 稳定的。 1 1 ( ) ( cos sin ) j i k r p t t i j j j j i j c t C e e A t B t s − − = = = + + 1 1 1 0 n n n n a s a s a s a − − + + + + = 0
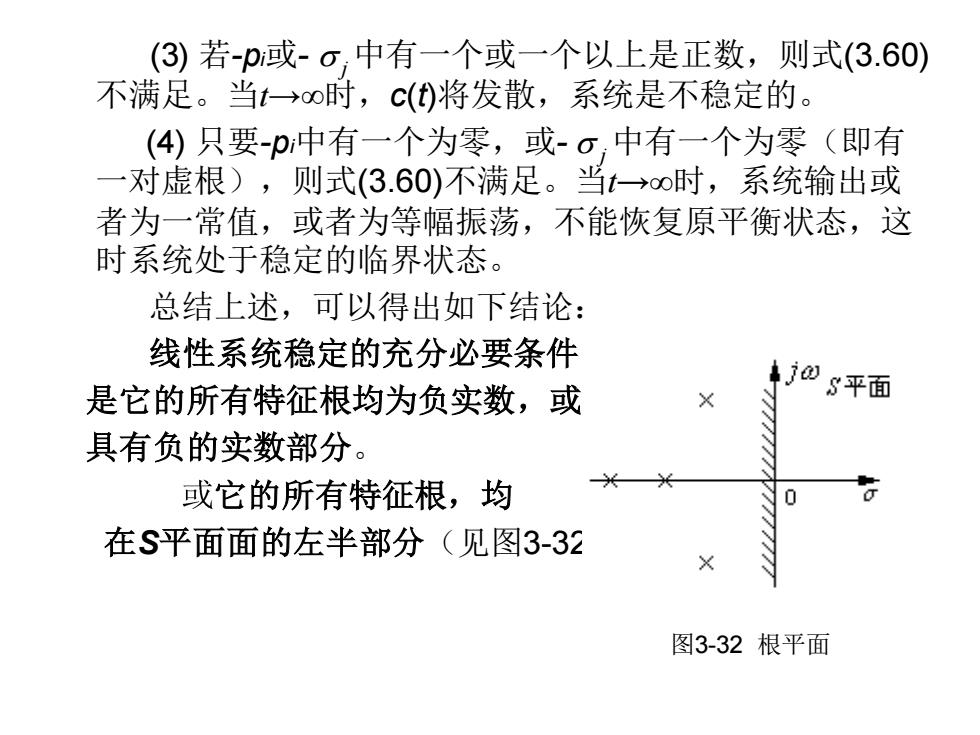
(3)若-p或-o,中有一个或一个以上是正数,则式(3.60) 不满足。当t→o时,c()将发散,系统是不稳定的。 (4)只要-p中有一个为零,或-o,中有一个为零(即有 一对虚根),则式(3.60)不满足。当t→o时,系统输出或 者为一常值,或者为等幅振荡,不能恢复原平衡状态,这 时系统处于稳定的临界状态。 总结上述,可以得出如下结论: 线性系统稳定的充分必要条件 是它的所有特征根均为负实数,或 jg平面 具有负的实数部分。 或它的所有特征根,均 在S平面面的左半部分(见图3-32 图3-32根平面
(3) 若-pi或- s j 中有一个或一个以上是正数,则式(3.60) 不满足。当t→∞时,c(t)将发散,系统是不稳定的。 (4) 只要-pi中有一个为零,或- s j 中有一个为零(即有 一对虚根),则式(3.60)不满足。当t→∞时,系统输出或 者为一常值,或者为等幅振荡,不能恢复原平衡状态,这 时系统处于稳定的临界状态。 总结上述,可以得出如下结论: 线性系统稳定的充分必要条件 是它的所有特征根均为负实数,或 具有负的实数部分。 它的所有特征根,均 在S平面面的左半部分(见图3-32)。 图3-32 根平面

表3.4 系统稳定性的简单例子 系统特征方程及其特征根 极点分布 单位阶跃响应 稳定性 s2+2ga.+02=0 4j四平面 十 512=-w±j0wV1-g9 稳定 (0<3<1) s2+02=0 jwg平面 米 临界 512=±jx 属不稳定) (3=0) c(t)=1-cos@,t c( s2+2g0+03=0 4j03平面 12=-0,±7@1-g7 不稳定 6 (0>3>-10 ct)=1- 8sin(@+ 1-2 c() +j08平面 8+1=0 稳定 1 5=T c(t)=1-e-ir e(1) s-1=0 jwg平面 不稳定 5-T c)=-1+g2r

表3.4列举了几个简单系统稳定性的例子。需要指出 的是,对于线性定常系统,由于系统特征方程根是由特征 方程的结构(即方程的阶数)和系数决定的,因此系统的 稳定性与输入信号和初始条件无关,仅由系统的结构和参 数决定。 如果系统中每个部分都可用线性定常微分方程描述, 那么,当系统是稳定时,它在大偏差情况下也是稳定的。 如果系统中有的元件或装置是非线性的,但经线性化处理 后可用线性化方程来描述,则当系统稳定时,我们只能说 这个系统在小偏差情况下是稳定的,而在大偏差时不能保 证系统仍是稳定的。 判断系统稳定性的条件是根据系统特征方程的根。但 求解高阶特征方程的根是相当麻烦的,往往需要求助于计 算机。实际上,我们只希望了解特征方程的根在S平面上 分布情况。所以,人们就希望能在不求解特征方程的情况 下,来确定系统的稳定性。下面就介绍常用的劳斯判据和 赫尔维茨判据
表3.4列举了几个简单系统稳定性的例子。需要指出 的是,对于线性定常系统,由于系统特征方程根是由特征 方程的结构(即方程的阶数)和系数决定的,因此系统的 稳定性与输入信号和初始条件无关,仅由系统的结构和参 数决定。 如果系统中每个部分都可用线性定常微分方程描述, 那么,当系统是稳定时,它在大偏差情况下也是稳定的。 如果系统中有的元件或装置是非线性的,但经线性化处理 后可用线性化方程来描述,则当系统稳定时,我们只能说 这个系统在小偏差情况下是稳定的,而在大偏差时不能保 证系统仍是稳定的。 判断系统稳定性的条件是根据系统特征方程的根。但 求解高阶特征方程的根是相当麻烦的,往往需要求助于计 算机。实际上,我们只希望了解特征方程的根在S平面上 分布情况。所以,人们就希望能在不求解特征方程的情况 下,来确定系统的稳定性。下面就介绍常用的劳斯判据和 赫尔维茨判据