第3章 机械能和功 §3.1功质点动能定理 §3.2保守力非保守力耗散力 §3.3质点在保守力场中的势能 §3.4质点系的势能 §3.5功能原理 能量守恒定律
第 3 章 机械能和功 §3.1 功 质点动能定理 §3.2 保守力 非保守力 耗散力 §3.3 质点在保守力场中的势能 §3.4 质点系的势能 §3.5 功能原理 能量守恒定律
§3.3质点在保守力场中的势能 一、势能的引入 与物体的位置相联系的系统能量称为势能(E,)。 保守力的功是势能变化的量度: 物体在保守力场中,b两点的势能Ea'Epb之差等 于质点由a点移动到b点过程中保守力做的功A。 E-E6=JF.d=A。 Aab=-(Epb-Epa)=-AEp >保守力的功等于系统势能的减少
一、势能的引入 与物体的位置相联系的系统能量称为势能(Ep)。 保守力的功是势能变化的量度: 物体在保守力场中a,b两点的势能Epa, Epb之差等 于质点由a点移动到b点过程中保守力做的功Aab。 ab b a ba =⋅=− ArFEE ∫ r r d pp ¾ 保守力的功等于系统势能的减少。 pp p ab = − − ab )( = −ΔEEEA §3.3 质点在保守力场中的势能
如:Aab=mg(2a-26)=-(Epb-Epa) Ab=Gm(-)=-(E6-E) Aab= ,2- 2=-(E6-Ea) 重力势能 26=0 Ep6=0 E。=mg GMm 引力势能 6=00 E6=0E。= 弹性势能 x6=0 E=0E。=5kx2
b = Ez pb = 0 0 弹性势能 重力势能 引力势能 0 b = ∞ Er pb = b = Ex pb = 0 0 p = mgzE r GMm Ep −= 2 p 2 1 = kxE )()( ab = − ba = − − EEzzmgA pp ab )( 21 21 pp 2 2 ab a b −−=−= EEkxkxA ab )() 11( pp ab ab ab EE rr = GMmA −−=− 如:
说明 ·势能是相互作用有保守力的系统的属性。 ·势能的大小只有相对的意义,相对于势能零点而 言。势能零点可以任意选取。 设空间点为势能零点,则空间任意一点下的势能为: E,()=E,()-E,()=F.d >空间某点的势能E,在数值上等于质点从该点移动到势 能零点时保守力作的功
∫ ⋅=−= 0 d)()()(p p 0p rr rFrErErE r r r r r r r ¾ 空间某点的势能Ep在数值上等于质点从该点移动到势 能零点时保守力作的功。 • 势能的大小只有相对的意义,相对于势能零点而 言。势能零点可以任意选取。 • 势能是相互作用有保守力的系统的属性。 说明 设空间 点为 r0 势能零点,则空间任意一点 的势能为: r rr
[例3-6轻弹簧原长L,劲度系数为k,下端悬挂质量为m 的重物。已知弹簧重物在O点达到平衡,此时弹簧伸长了 x,现取x轴向下为正,原点位于:()弹簧原长位置, (2)力的平衡位置。若取原点为重力势能和弹性势能的势 能零点,分别计算重物在任一位置P时系统的总势能。 解: (1)以弹簧原长点0'为坐标 原点,系统总势能:
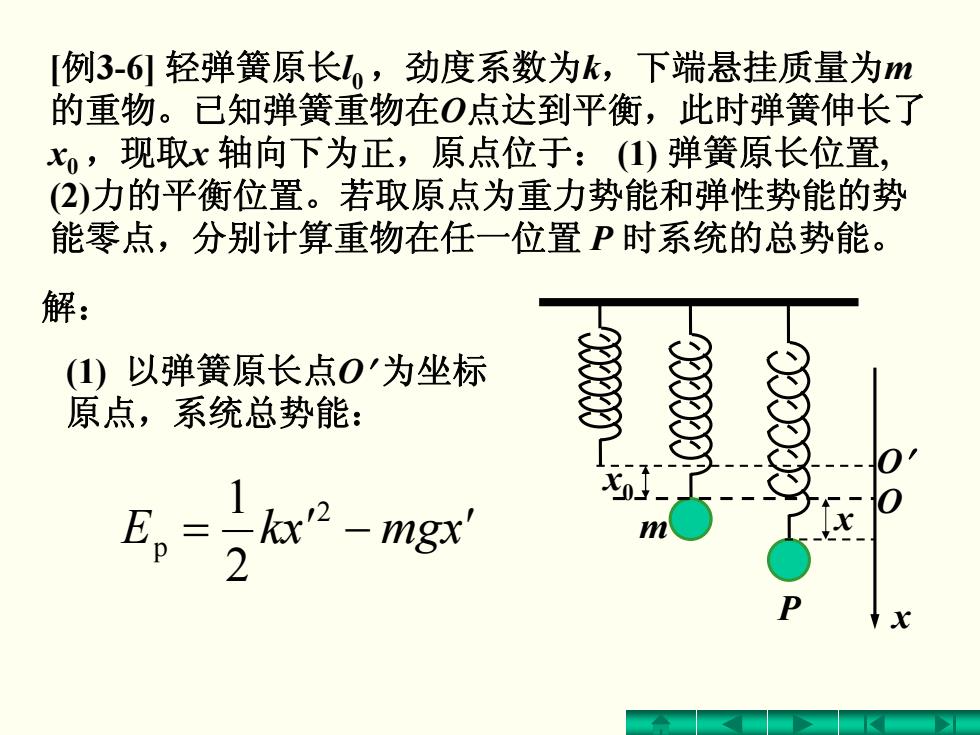
[例3-6] 轻弹簧原长l0 ,劲度系数为k,下端悬挂质量为m 的重物。已知弹簧重物在O点达到平衡,此时弹簧伸长了 x0,现取x 轴向下为正,原点位于: (1) 弹簧原长位置, (2)力的平衡位置。若取原点为重力势能和弹性势能的势 能零点,分别计算重物在任一位置 P 时系统的总势能。 解: (1) 以弹簧原长点O′ 为坐标 原点,系统总势能: = ′ − xmgxkE ′ 2 p 21 x m O′ O P x0 x