、一阶系统的单位阶跃响应 x(t)=1-e7 0 T 2T 3T 4T 5T 0 0.632 0.865 0.95 0.982 0.993 x(t) 2 初始斜率一子 0 0.865 0.632 c(f)-1-e-t 0 27T 3 图3-3一阶系统的单位阶妖响应曲线
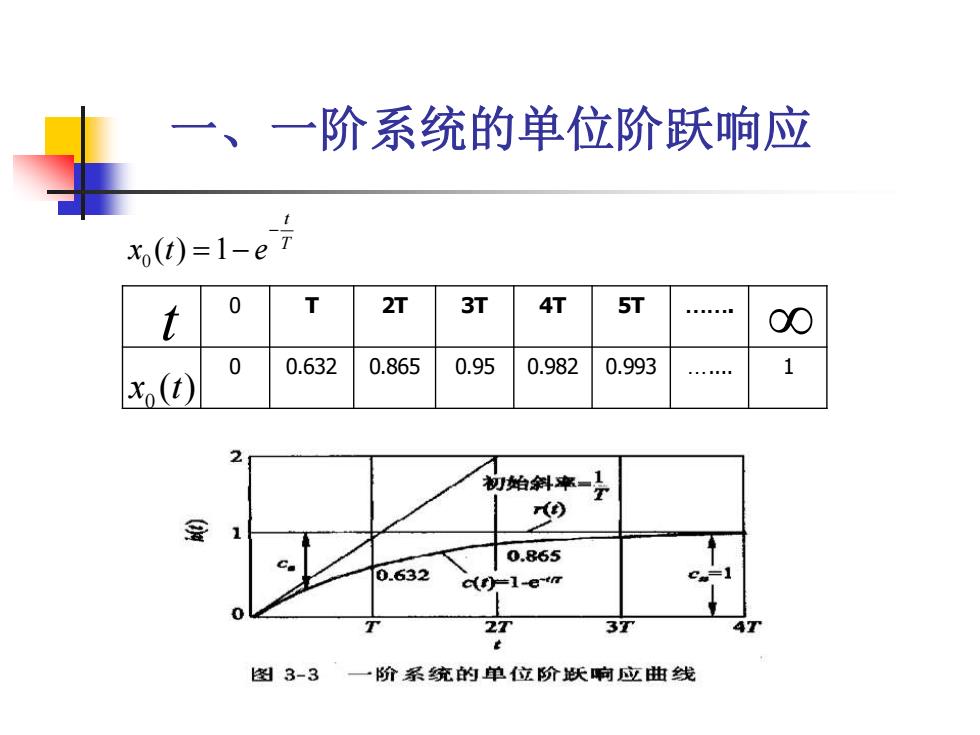
0 T 2T 3T 4T 5T . 0 0.632 0.865 0.95 0.982 0.993 . 1 0 x t( ) t 0 ( ) 1 t T x t e − = − 一、一阶系统的单位阶跃响应
一、一阶系统的单位阶跃响应 可知: (1)一阶惯性系统总是稳定的,无振荡的。 (2)时间T上升到0.632的高度,反之,用实验方法测出曲线到达 63.2%高度点所用的=时间常数T。 (3)经过3T~4T,达稳态值的95%~98%,可认为其调整过程完成 故一般取调整时间为(3~4)T=s. (4)在=0处,响应曲线的切线斜率:1/T 时间常数T反映了一阶系统的固有特性,T↓,系统惯性↓,系统响应个
可知: (1)一阶惯性系统总是稳定的,无振荡的。 (2)时间T上升到0.632的高度,反之,用实验方法测出曲线到达 63.2%高度点所用的t=时间常数T。 (3)经过3T~4T,达稳态值的95%~98%,可认为其调整 过程完成 ,故一般取调整时间为(3~4)T=ts. (4)在t=0处,响应曲线的切线斜率:1/T. 时间常数T反映了一阶系统的固有特性,T , 系统惯性 , 系统响应 一、一阶系统的单位阶跃响应
二、一阶系统的单位脉冲响应 x()=6()→x()=1 AXo(t) 1/ K=-1/T2 1/T TS+1 s+ w(t) 0.368/T 0e 2T 3T 0 2T 4T <2%,过渡过程 t,=4T调整时间 1 xo (t) 0.368 0.135J 0.018 0 T T↓,过渡时间↓,快速性个
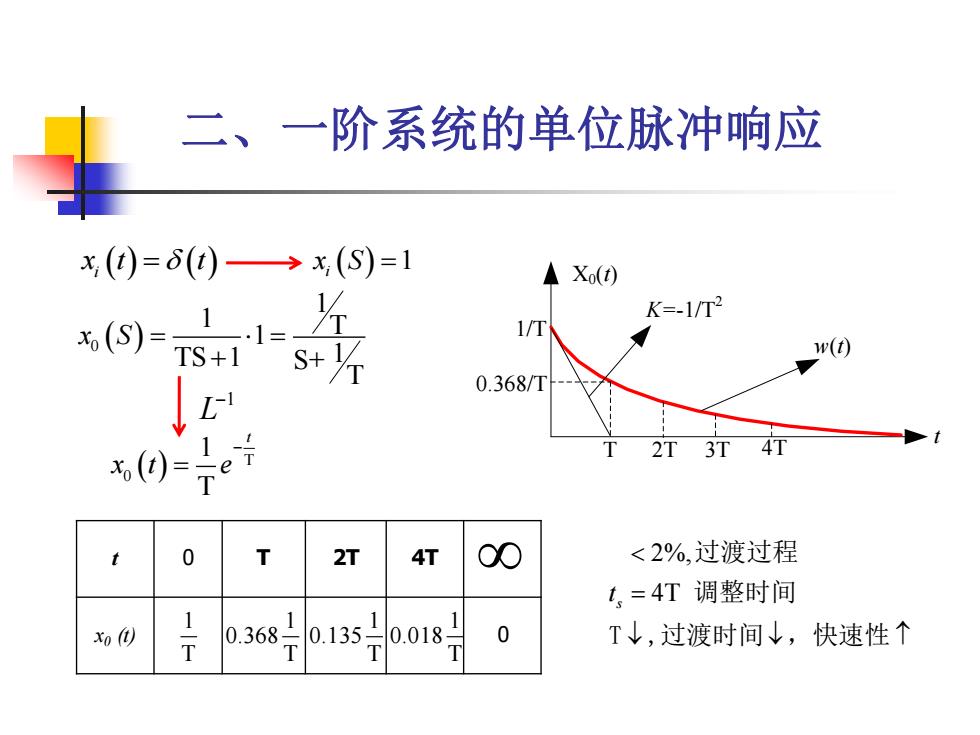
x t t i ( ) = ( ) ( ) 1 i x S = 0 ( ) 1 1 T 1 TS 1 S+ 1 T x S = = + ( ) T 0 1 T t x t e − = 1 L − t 0 T 2T 4T x0 (t) 0 1 T 1 0.368 T 1 0.135 T 1 0.018 T 二、一阶系统的单位脉冲响应 2%, t s 4T = 过渡过程 调整时间 T ,过渡时间 ,快速性 X0(t) t 1/T 0.368/T T 2T 3T 4T K=-1/T2 w(t)
三、一阶系统的单位斜坡响应 e-x) x(t)=t,→ (TS+1) 母=1是回回回 _1TT TS+I S2 SS PS+1 S2 S S+I/T ↓c=[x问1n-nr ◆Xo() X()=t 1/T e(oo)=T ∴.xo(t)=t-T+Te 0.368/T t=0,(t)=∞,e(o)=x(∞)-x(o)=T Xo(t)=t-T+TeVT 瞬态响应的特性反应系统本身的特性,T个响应速度)。 输入试验信号是为了识别系统的特性,系统特性取决于系统的 参数,不取决于外作用的形式
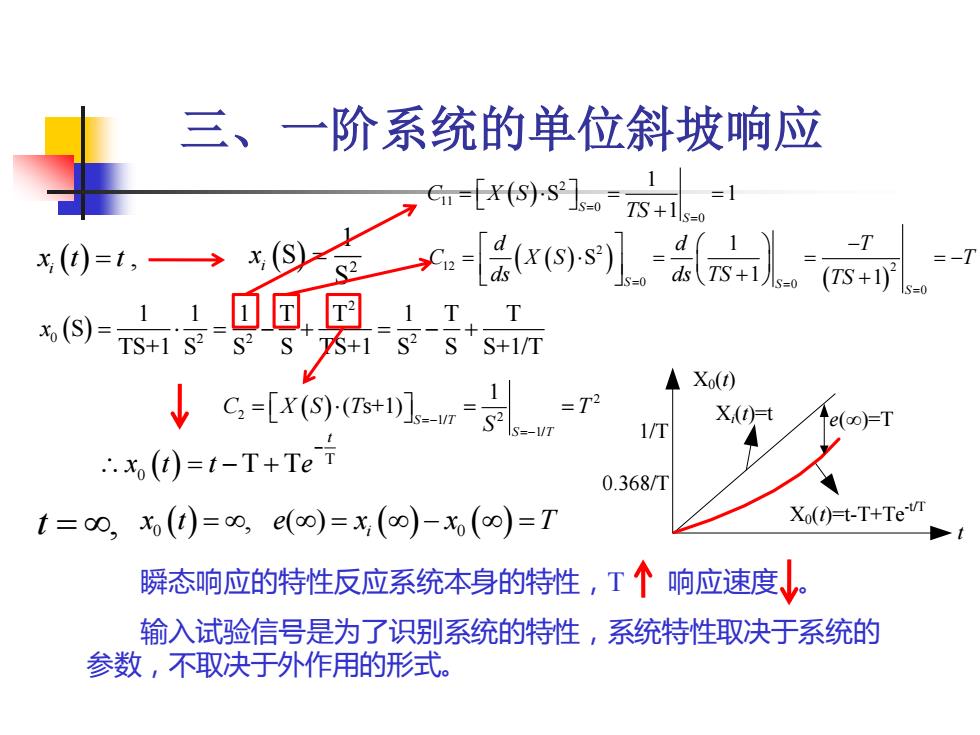
瞬态响应的特性反应系统本身的特性,T 响应速度 。 输入试验信号是为了识别系统的特性,系统特性取决于系统的 参数,不取决于外作用的形式。 三、一阶系统的单位斜坡响应 ( ) , i x t t = ( ) T 0 T T t x t t e − = − + t = , x t 0 ( ) = , X0(t) t 1/T 0.368/T e(∞)=T X0(t)=t-T+Te -t/T Xi(t)=t ( ) 2 1 S S i x = ( ) 2 0 2 2 2 1 1 1 T T 1 T T S TS+1 S S S TS+1 S S S+1/T x = = − + = − + ( ) 2 11 0 0 1 S 1 1 S S C X S TS = = = = = + ( ( ) ) ( ) 2 12 2 0 0 0 1 S S 1 S 1 S d d T C X S T ds ds TS = = TS = − = = = = − + + ( ) 2 2 1/ 2 1/ 1 ( s+1) S T S T C X S T T S = − = − = = = e x x T ( ) = − = i ( ) 0 ( )
eg:两个T值不同的惯性环节串联,求其单位阶跃响应, 已知:GS)(S 1 1 Xo(t) x,(S)10S+1S+1 11 3 2 解:6S)=2中5是+付 w 1 1 1 x()=- e10+e+1 S2 S1 0.09 9 -1 -0.1 231 系统响应取决于T,T值小,对响应影响小。 靠近虚轴的极点起主导作用
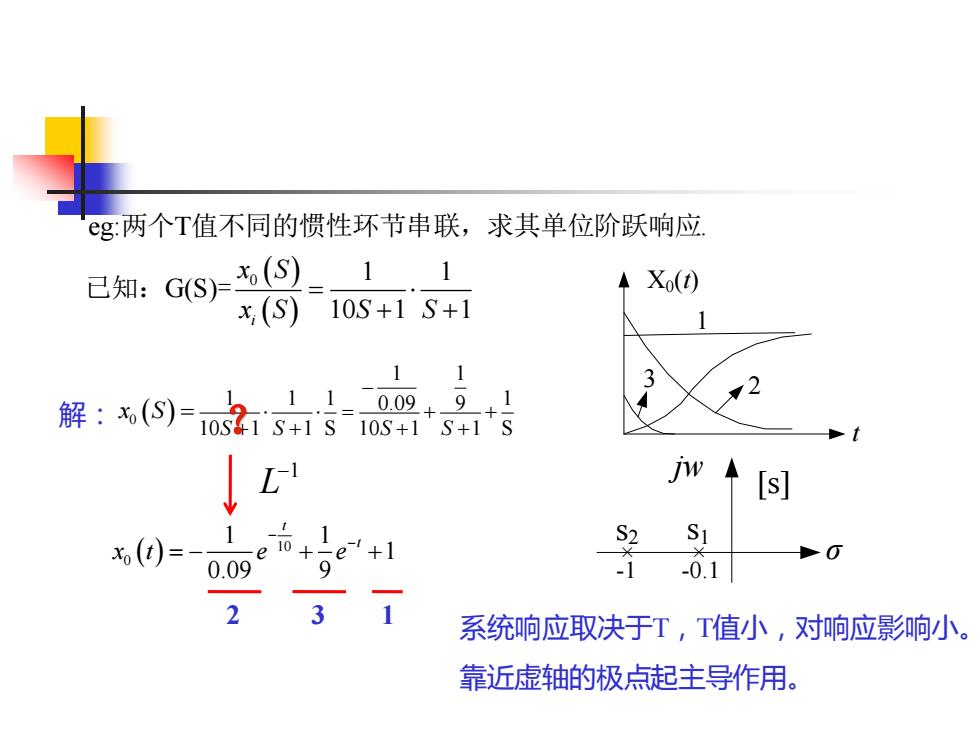
( ) ( ) 0 eg: T . 1 1 G(S) 10 1 1 i x S x S S S = + + 两个 值不同的惯性环节串联,求其单位阶跃响应 已知: = x S 0 ( ) = 1 L − ( ) 10 0 1 1 1 0.09 9 t t x t e e − − = − + + 1 1 1 1 1 1 0.09 9 10 1 1 S 10 1 1 S S S S S − = + + + + + + 2 3 1 X0(t) t 3 2 1 jw × × σ s2 s1 [s] -1 -0.1 系统响应取决于T,T值小,对响应影响小。 靠近虚轴的极点起主导作用。 解: