第五章系统的稳定性 设计控制系统时应满足多种性能指标,但最重要的技术 要求是系统必须稳定。因为稳定性是系统能正常工作的首 要条件,只有工作稳定才能进一步讨论其他性能指标。 分析系统的稳定性是控制理论的最重要组成部分之一。 控制理论对于判断一个线性定常系统是否稳定提供了多 种方法。 本章着重介绍几种常用的稳定判据,以及提高系统稳定 性的方法。 2/88
第五章 系统的稳定性 2/88 设计控制系统时应满足多种性能指标,但最重要的技术 要求是系统必须稳定。因为稳定性是系统能正常工作的首 要条件,只有工作稳定才能进一步讨论其他性能指标。 分析系统的稳定性是控制理论的最重要组成部分之一。 控制理论对于判断一个线性定常系统是否稳定提供了多 种方法。 本章着重介绍几种常用的稳定判据,以及提高系统稳定 性的方法

本章内容 介绍系统稳定性的基本概念,判断系统稳定性的 明 基本出发点 确 二 系统稳定的充分必要条件 三、 代数判据(Routh、Hurwitz判据) 重点 四、Nyquist判据的基本原理和方法,Bode判据 掌握 五、 相对稳定性的概念 六、掌握相位裕量和幅值裕量的概念及计算方法 3/88
一、介绍系统稳定性的基本概念,判断系统稳定性的 基本出发点 二、系统稳定的充分必要条件 3/88 本章内容 三、代数判据(Routh、Hurwitz判据) 四、Nyquist判据的基本原理和方法,Bode判据 五、相对稳定性的概念 六、掌握相位裕量和幅值裕量的概念及计算方法 明 确 重点 掌握
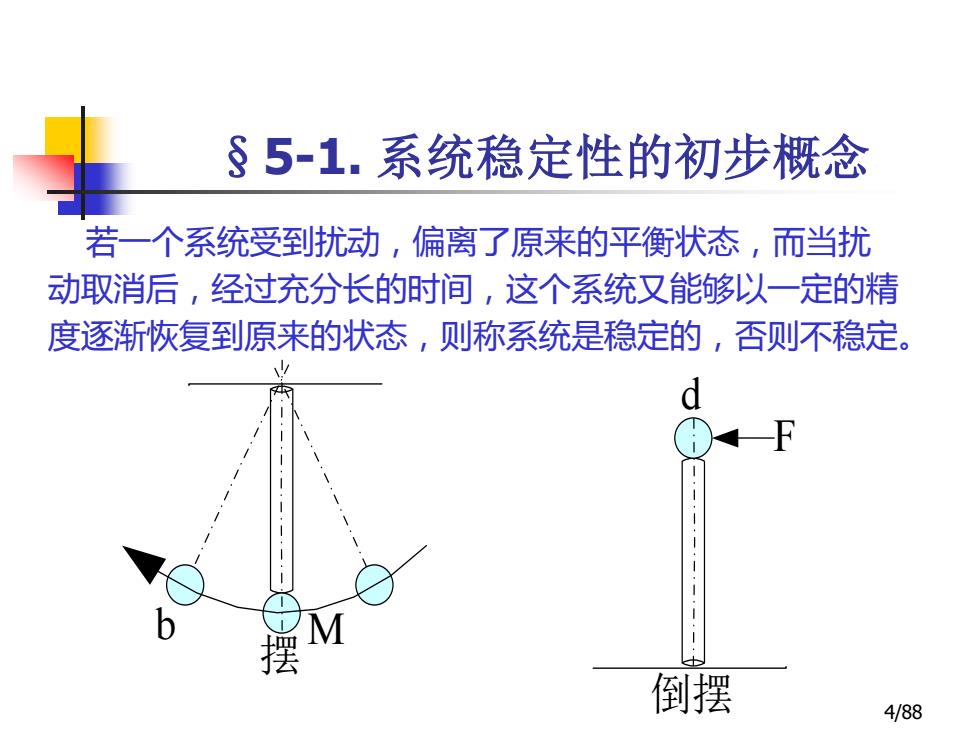
§5-1.系统稳定性的初步概念 若一个系统受到扰动,偏离了原来的平衡状态,而当扰 动取消后,经过充分长的时间,这个系统又能够以一定的精 度逐斩恢复到原来的状态,则称系统是稳定的,否则不稳定。 d F 摆 倒摆 4/88
若一个系统受到扰动,偏离了原来的平衡状态,而当扰 动取消后,经过充分长的时间,这个系统又能够以一定的精 度逐渐恢复到原来的状态,则称系统是稳定的,否则不稳定。 4/88 §5-1. 系统稳定性的初步概念 b M 摆 F 倒摆 d
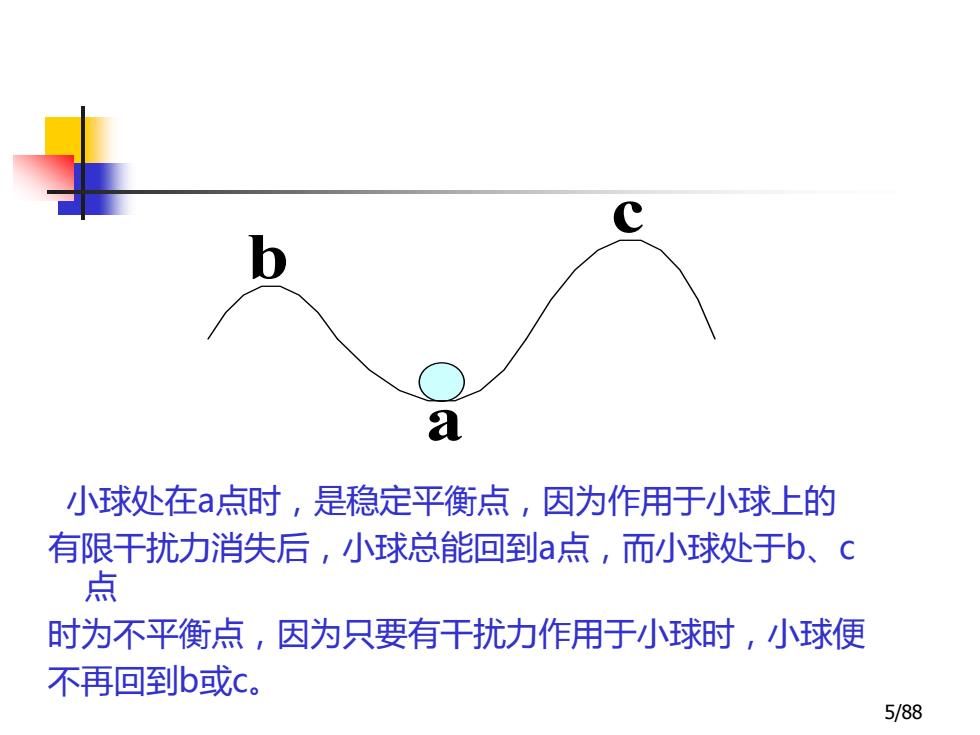
小球处在a点时,是稳定平衡点,因为作用于小球上的 有限干扰力消失后,小球总能回到a点,而小球处于b、c 点 时为不平衡点,因为只要有干扰力作用于小球时,小球便 不再回到b或c。 5/88
小球处在a点时,是稳定平衡点,因为作用于小球上的 有限干扰力消失后,小球总能回到a点,而小球处于b、c 点 时为不平衡点,因为只要有干扰力作用于小球时,小球便 不再回到b或c。 5/88 c a b
控制系统在实际运行过程中,总会受到外部和内部 的扰动,如火炮射击时,施加给随动系统的冲击负载; 雷达天线跟踪时,突然遇到阵风。如果系统不稳定,就 会在任何微小的扰动作用下偏离原来的平衡状态,并随 时间的推移而发散。 因此,如何分析系统的稳定性,并提出保证系统稳 定的措施,是自动控制的基本任务。 6/88
控制系统在实际运行过程中,总会受到外部和内部 的扰动,如火炮射击时,施加给随动系统的冲击负载; 雷达天线跟踪时,突然遇到阵风。如果系统不稳定,就 会在任何微小的扰动作用下偏离原来的平衡状态,并随 时间的推移而发散。 因此,如何分析系统的稳定性,并提出保证系统稳 定的措施,是自动控制的基本任务。 6/88