第四章控制系统的频率特性 第三章中讲述:建立数学模型→分析:稳、快、准 直接方法→时域分析法:直观,分析高阶系统非常繁琐 间接方法→频率法 特点 从G,(S)分析闭环控制的各种特性 频率法的优,点 (1)工程实践中,不希望大量繁多计算,要求简单迅速的分析出动态 性能及如何调整。(而开环频率特性容易绘制或通过实验获得) 此外:电路 机械振动了与频率特性有密切的关系 机械受到一定w的作用力时产生强迫振动,由于内反馈还会引起自激 振动。振动学中的共振频率,频谱密度,动刚度,扶振稳定性等概念都 可归纳为机械系统在频率域中表现的特性。 (2)可由试验确定 本章内容 (一)阐明频率响应与频率特性的基本概念及表示方法一基础
第四章 控制系统的频率特性 第三章中讲述:建立数学模型 分析:稳、快、准 直接方法 时域分析法:直观,分析高阶系统非常繁琐 间接方法 频率法 特点 从 G S k 分析 闭环控制的各种特性 频率法的优点 (1)工程实践中,不希望大量繁多计算,要求简单迅速的分析出动态 性能及如何调整。(而开环频率特性容易绘制或通过实验获得) 此外:电路 机械振动 与频率特性有密切的关系 机械受到一定 w 的作用力时产生强迫振动,由于内反馈还会引起自激 振动。振动学中的共振频率,频谱密度,动刚度,扶振稳定性等概念都 可归纳为机械系统在频率域中表现的特性。 (2)可由试验确定 本章内容 (一)阐明频率响应与频率特性的基本概念及表示方法——基础

频率特性与传函的关系 动刚度与动柔度的概念 ”频率特性与传函的关系 (二)介绍频率特性的图形分析法 动刚度与动柔度的概念 Nyqwist图与Bode图的一般概念,典型环节 绘制Nyqwist图与Bode图的一般步骤和方法 (三)有频率特性曲线→传函 (根据频率特性的Bode图辨识系统的数学模型的一般方法) (四)其他有关问题:频率特性的特征量,最小相位系统等
频率特性与传函的关系 动刚度与动柔度的概念 频率特性与传函的关系 (二)介绍频率特性的图形分析法 动刚度与动柔度的概念 Nyqwist 图与 Bode 图的一般概念,典型环节 绘制 Nyqwist 图与 Bode 图的一般步骤和方法 (三)有频率特性曲线 传函 (根据频率特性的 Bode 图辨识系统的数学模型的一般方法) (四)其他有关问题:频率特性的特征量,最小相位系统等
§4.1频率特性的基本概念 一.频率响应 系统对正弦信号(或谐波信号)的稳态响应。 响应瞬态一不是正弦波 ·稳态一是和输入的正弦信号w相同的正弦波,但振幅和相位都 与输入量不同。 输入:x(U=X,sin ot=Xem 输入的稳态响应:七0=X,(o)sin[or+p(o)] =Xo(o)eo 一频率响应 例4.1:机械系统如图4.1所示.当输入正弦力f()=Fsinot时,求其 x)位移的稳态输出。 1 么f0=a0+a0 6同c8 —T=k 时间常数 图4.1机械系统 Fo C C2S+C K(S)-141S+014
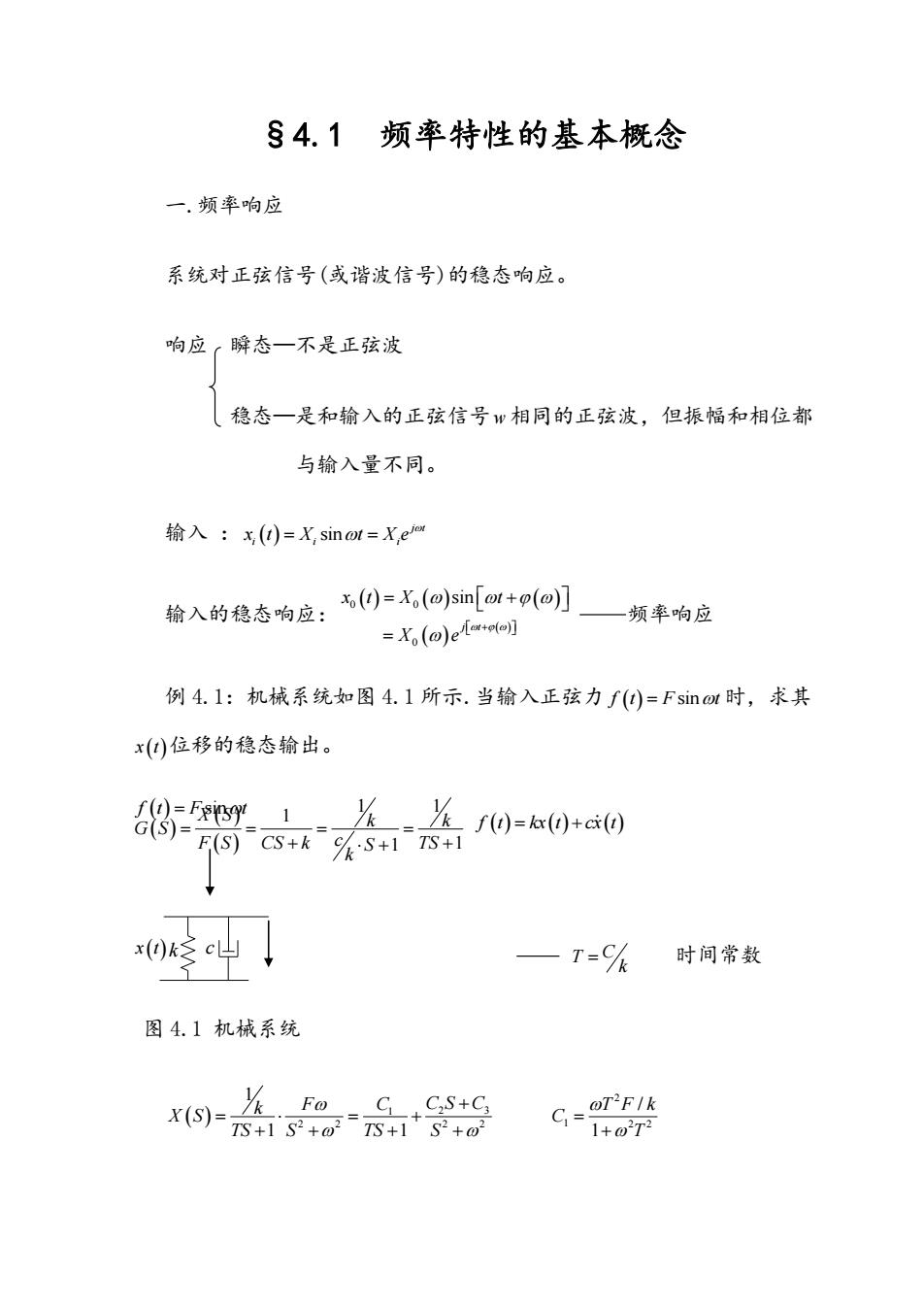
§4.1 频率特性的基本概念 一.频率响应 系统对正弦信号(或谐波信号)的稳态响应。 响应 瞬态—不是正弦波 稳态—是和输入的正弦信号 w 相同的正弦波,但振幅和相位都 与输入量不同。 输入 : sin j t i i i x t X t X e 输入的稳态响应: 0 0 0 sin j t x t X t X e 频率响应 例 4.1:机械系统如图 4.1 所示.当输入正弦力 f t F t sin 时,求其 x t 位移的稳态输出。 T C k 时间常数 图 4.1 机械系统 1 2 3 2 2 2 2 1 1 1 k F C C S C X S TS S TS S 2 1 2 2 / 1 T F k C T f t kx t cx t k c 1 1 1 1 1 X S k k G S F S CS k TS c S k f t F t sin x t
JC0+C,=CS+Cl= 器 G-R7o,G=o OTF/k (S)=1+7 FoT 3+117k0+To32+m+k+Tas+ 瞬态分量 0-C停子+F停-a Fik 1→0.→0 in(al-arctanTo)→稳态分量 +0'T2 所以其稳态输出一频率响应: 1/k Fsin(er-arctanTo) =A(@)Fsin(@t+o(@))=x(o)sin(ot+p(@)) 式中:x,()其输出谐波的幅值正比于输入谐波的幅值F,且是输入谐 波频率。的非线性函数。 (。)其输出谐波的相位与输入谐波的幅值F无关,与输入谐波频率的 相位差,是。的非线性函数
2 3 2 3 2 2 1 1 1 1 S j F F j t k jC C C S C j t k T 3 2 2 2 2 2 1 , 1 1 F F T C C k T k T 2 2 2 2 2 2 2 2 2 2 / 1 1 / 1 1 TF k T F T S F X S S T S S k T k T 瞬态分量 2 2 2 2 2 2 / / / sin cos 1 1 1 t T TF k F k F T k x t e t t T T T t . 0 2 2 2 2 / / sin arctan 1 1 t T TF k F k e t T T T 稳态分量 所以其稳态输出 频率响应: 2 2 1 / sin arctan 1 k x t F t T T A F t sin x t 0 sin 式中: x0 其输出谐波的幅值正比于输入谐波的幅值 F,且是输入谐 波频率 的非线性函数。 其输出谐波的相位与输入谐波的幅值 F 无关,与输入谐波频率的 相位差,是 的非线性函数。 1 L
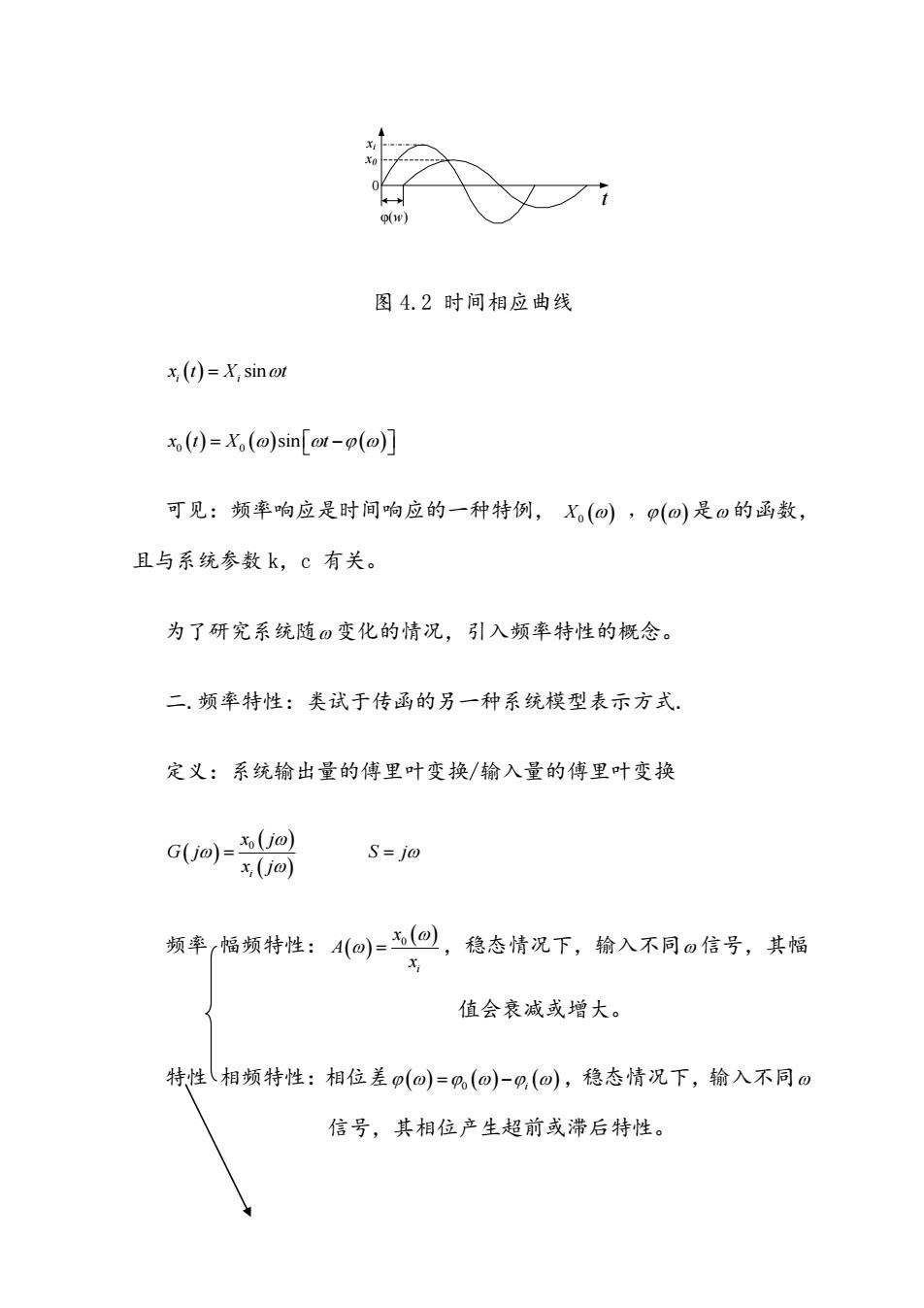
图42时间相应曲线 x,(t)=X,sinot x(t)=X(@)sin[at-p(o)] 可见:频率响应是时间响应的一种特例,X(回),(@)是的函数, 且与系统参数k,c有关。 为了研究系统随变化的情况,引入频率特性的概念。 二.频率特性:类试于传函的另一种系统模型表示方式 定义:系统输出量的傅里叶变换/输入量的傅里叶变换 G(Um)=U回 S=jo x.(jo) 频率/幅频特性:A)=(回),稳态情况下,输入不同o信号,其福 X 值会衰减或增大。 特性相频特性:相位差(@)=%(@)-g(@),稳态情况下,输入不同a 信号,其相位产生超前或滞后特性
t 0 φ(w) xi x0 图 4.2 时间相应曲线 sin i i x t X t x t X t 0 0 sin 可见:频率响应是时间响应的一种特例, X0 , 是 的函数, 且与系统参数 k,c 有关。 为了研究系统随 变化的情况,引入频率特性的概念。 二.频率特性:类试于传函的另一种系统模型表示方式. 定义:系统输出量的傅里叶变换/输入量的傅里叶变换 0 i x j G j S j x j 频率 幅频特性: 0 i x A x ,稳态情况下,输入不同 信号,其幅 值会衰减或增大。 特性 相频特性:相位差 0 i ,稳态情况下,输入不同 信号,其相位产生超前或滞后特性