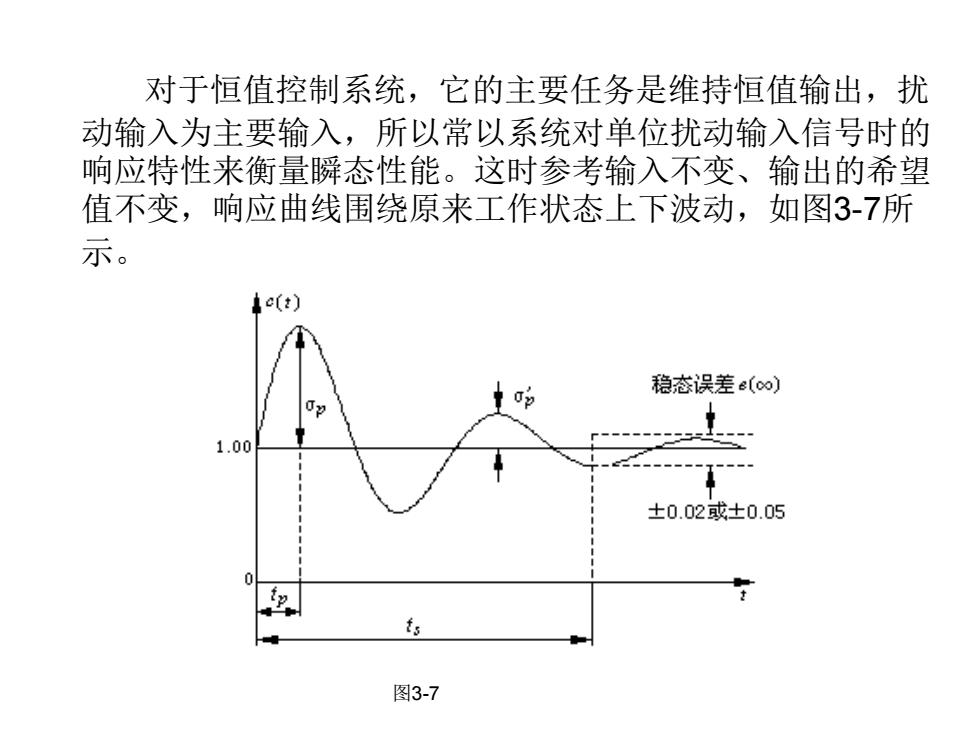
对于恒值控制系统,它的主要任务是维持恒值输出,扰 动输入为主要输入,所以常以系统对单位扰动输入信号时的 响应特性来衡量瞬态性能。这时参考输入不变、输出的希望 值不变,响应曲线围绕原来工作状态上下波动,如图3-7所 示。 4c(t) 稳态误差e(co) 02 1.00 ±0.02或±0.05 图3-7
对于恒值控制系统,它的主要任务是维持恒值输出,扰 动输入为主要输入,所以常以系统对单位扰动输入信号时的 响应特性来衡量瞬态性能。这时参考输入不变、输出的希望 值不变,响应曲线围绕原来工作状态上下波动,如图3-7所 示。 图3-7
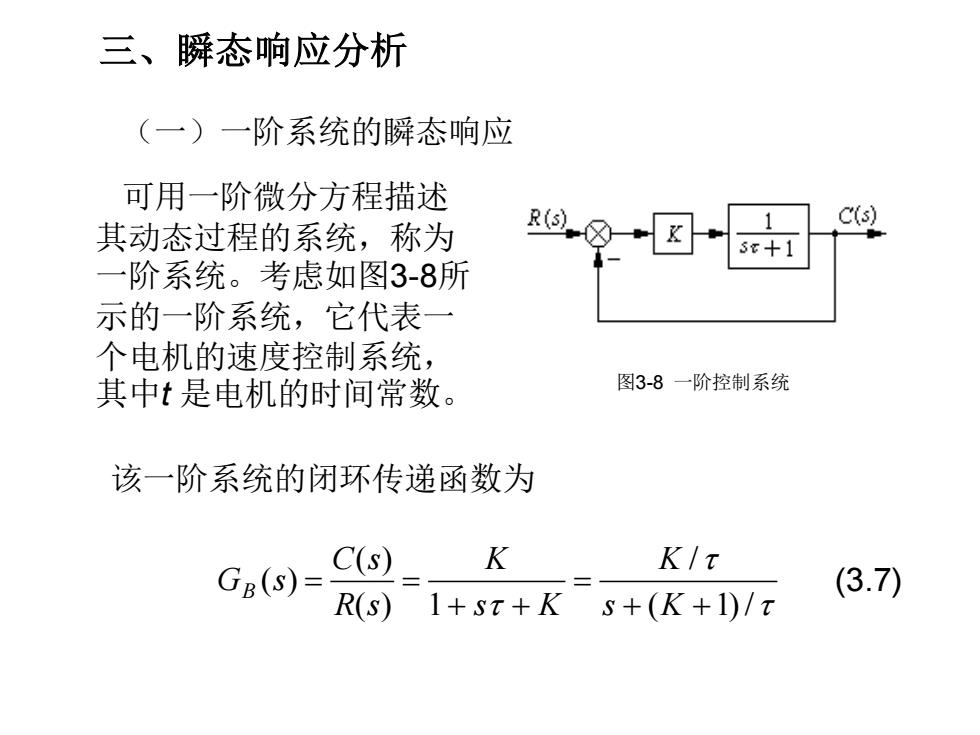
三、瞬态响应分析 (一)一阶系统的瞬态响应 可用一阶微分方程描述 1 C(s) 其动态过程的系统,称为 一阶系统。考虑如图3-8所 示的一阶系统,它代表一 个电机的速度控制系统, 其中t是电机的时间常数。 图3-8一阶控制系统 该一阶系统的闭环传递函数为 C(s) K K/ GB(s)= (3.7) R(s)1+st+K s+(K+1)/z
可用一阶微分方程描述 其动态过程的系统,称为 一阶系统。考虑如图3-8所 示的一阶系统,它代表一 个电机的速度控制系统, 其中t 是电机的时间常数。 该一阶系统的闭环传递函数为 (3.7) 三、瞬态响应分析 (一)一阶系统的瞬态响应 图3-8 一阶控制系统 ( 1)/ / ( ) 1 ( ) ( ) + + = + + = = s K K s K K R s C s G s B
当系统输入为单位阶跃信号时,即()=1()或R(S)=1/s,输 出响应的拉氏变换为 K/x1KK+1)K(K+1) C(S)= s+(K+1)/xS S 5+(K+10/x(3.8) 取C(S)的拉氏反变换,可得一阶系统的单位阶跃响应为 K K c(t)= e-(K+I)t/r K+1K+1 (3.9) 系统响应如图3-9所示。 从图中看出,响应的稳态值为 K c(0)= K+1 (3.10)
当系统输入为单位阶跃信号时,即r(t)=1(t)或R(s)=1/s,输 出响应的拉氏变换为 (3.8) 取C(s)的拉氏反变换,可得一阶系统的单位阶跃响应为 (3.9) 系统响应如图3-9所示。 从图中看出,响应的稳态值为 (3.10) ( 1)/ 1 /( 1) /( 1) ( 1)/ / ( ) + + + − + = + + = s K K K s K K s K s K C s ( 1) / 1 1 ( ) K t e K K K K c t − + + − + = 1 ( ) + = K K c
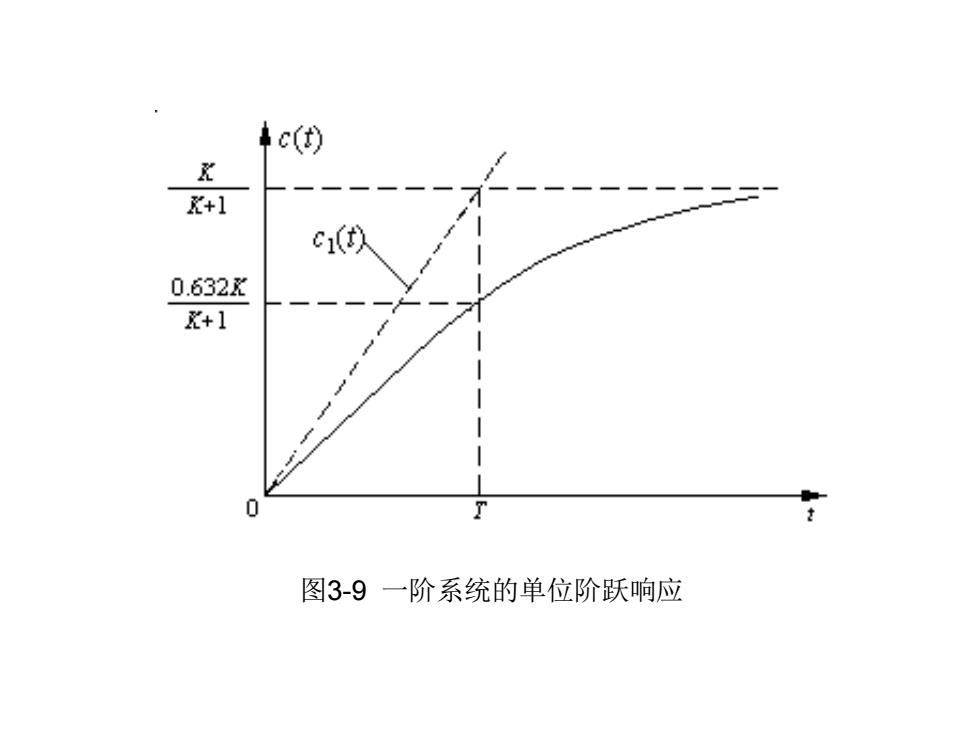
年c() X+1 ci(t) 0.632x X+1 图3-9一阶系统的单位阶跃响应
图3-9 一阶系统的单位阶跃响应