
第12章 矩阵位移法 K<D 12-1 概述 12-2 局部坐标下的单元刚度矩阵 12-3 整体坐标下的单元刚度矩阵 12-4 连续梁的整体刚度矩阵 12-5 刚架的整体刚度矩阵 12-6 等效结点荷载 12-7 计算步骤和算例 12-8 忽略轴向变形时矩形刚架的整体分析 12-9 桁架及组合结构的整体分析
第12章 矩阵位移法 12-1 概述 12-2 局部坐标下的单元刚度矩阵 12-3 整体坐标下的单元刚度矩阵 12-4 连续梁的整体刚度矩阵 12-5 刚架的整体刚度矩阵 12-6 等效结点荷载 12-7 计算步骤和算例 12-8 忽略轴向变形时矩形刚架的整体分析 12-9 桁架及组合结构的整体分析

12-1概述 矩阵位移法的理论基础是传统的位移法,只 是它的表达形式采用矩阵代数,而这种数学算法 便于编制计算机程序,实现计算过程的程序化。 矩阵位移法又可以称为杆件结构的有限元 矩阵位移法的基本步骤是: (1)结构的离散化: (2)单元分析; (3)整体分析
12-1 概述 矩阵位移法的理论基础是传统的位移法,只 是它的表达形式采用矩阵代数,而这种数学算法 便于编制计算机程序,实现计算过程的程序化。 矩阵位移法又可以称为杆件结构的有限元 矩阵位移法的基本步骤是: (1)结构的离散化; (2)单元分析; (3)整体分析
12-1概述 任务 意义 建立杆端力与杆端位 单元 移间的刚度方程,形 用矩阵形式表示杆 分析 件的转角位移方程 成单元刚度矩阵 由变形条件和平衡条件 整体 建立结点力与结点位移 用矩阵形式表示位 分析 间的刚度方程,形成整 移法基本方程 体刚度矩阵
12-1 概述 任 务 意义 单元 分析 建立杆端力与杆端位 移间的刚度方程,形 成单元刚度矩阵 用矩阵形式表示杆 件的转角位移方程 任 务 意义 整体 分析 由变形条件和平衡条件 建立结点力与结点位移 间的刚度方程,形成整 体刚度矩阵 用矩阵形式表示位 移法基本方程
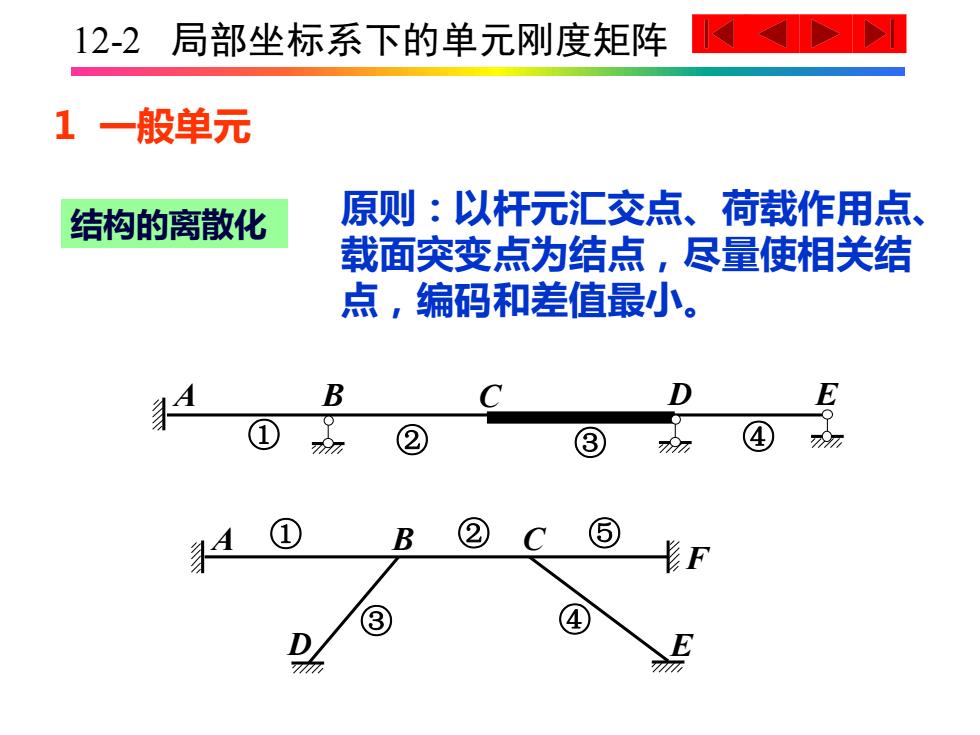
12-2局部坐标系下的单元刚度矩阵 1一般单元 结构的离散化 原侧:以杆元汇交点、荷载作用点、 载面突变点为结点,尽量使相关结 点,编码和差值最小。 B D E ① ② ③ ④ 9玩 ① B ⑤
12-2 局部坐标系下的单元刚度矩阵 1 一般单元 A B C D E ① ② ③ ④ F ⑤ A B D E ① ② ③ ④ C 结构的离散化 原则:以杆元汇交点、荷载作用点、 载面突变点为结点,尽量使相关结 点,编码和差值最小
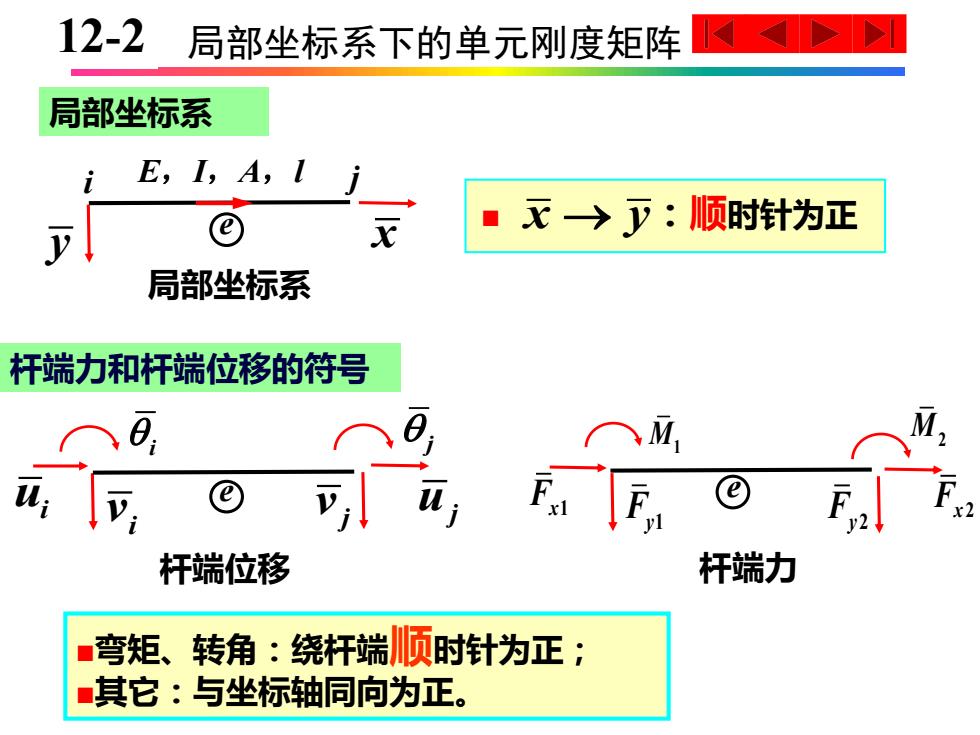
12-2 局部坐标系下的单元刚度矩阵 局部坐标系 E,I,A, 灭→少:顺时针为正 y 局部坐标系 杆端力和杆端位移的符号 ⌒M, ,E,© 杆端位移 杆端力 弯矩、转角:绕杆端顺时针为正; 其它:与坐标轴同向为正
10-2 局部坐标系下的单元刚度矩阵 杆端力和杆端位移的符号 ■弯矩、转角:绕杆端顺时针为正; ■其它:与坐标轴同向为正。 i E,I,A,l j y x ■ x y → :顺时针为正 i j ui i v j v uj e 杆端位移 F x1 F y1 F y2 F x 2 M1 M2 e 杆端力 局部坐标系 e 局部坐标系 12-2