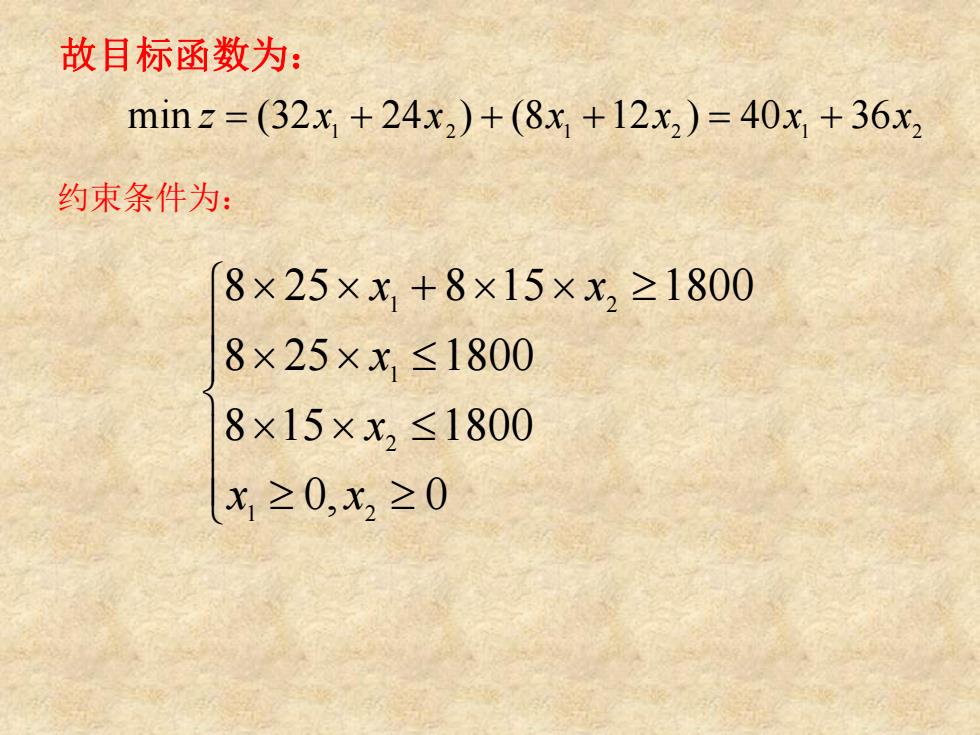
故目标函数为: minz=(32x+24x2)+(8.x+12x2)=40x+36x2 约束条件为: 8×25×x,+8×15×x2≥1800 8×25×x≤1800 8×15×x2≤1800 x≥0,x2≥0
故目标函数为: 1 2 1 2 1 2 min z (32x 24x ) (8x 12x ) 40x 36x 约束条件为: 0, 0 8 15 1800 8 25 1800 8 25 8 15 1800 1 2 2 1 1 2 x x x x x x
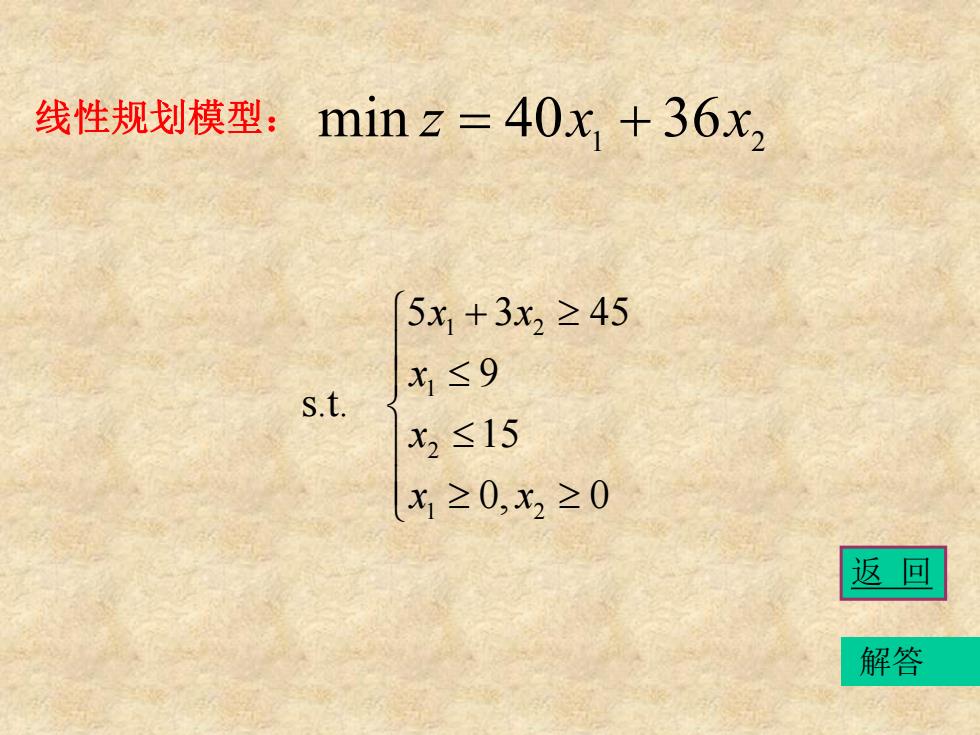
线性规划模型:minz=40x,+36x2 5x1+3x2≥45 ¥1≤9 S.t. x2≤15 x1≥0,x2≥0 返回 解答
线性规划模型: 1 2 min z 40x 36x 1 2 1 2 1 2 5 3 45 9 s.t. 15 0, 0 x x x x x x 解答 返 回
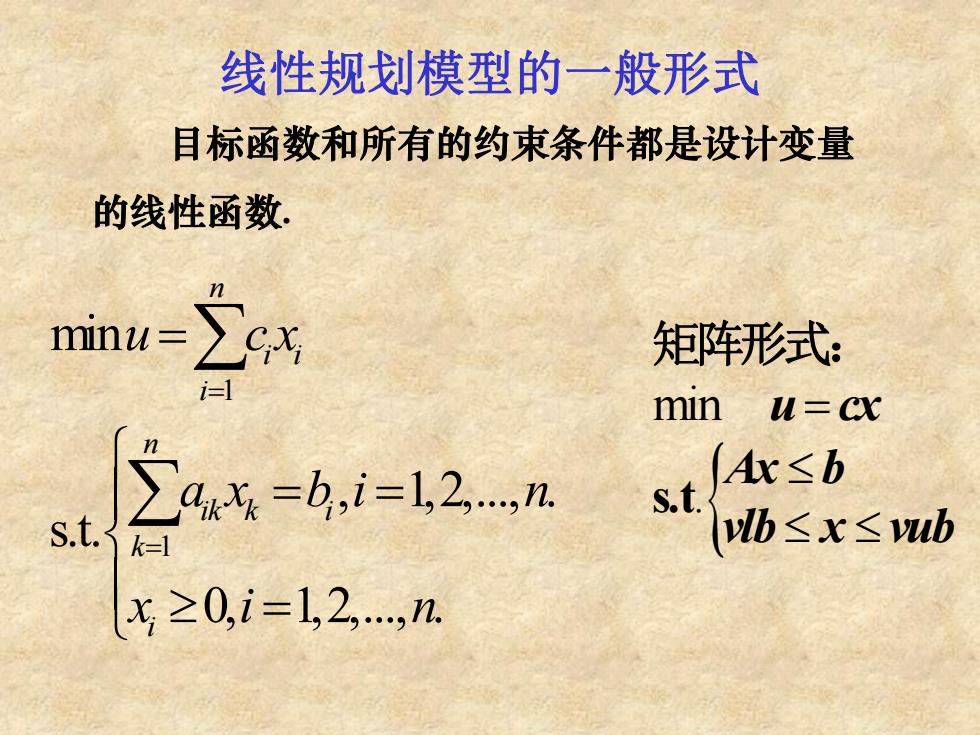
线性规划模型的一般形式 目标函数和所有的约束条件都是设计变量 的线性函数. minu=-∑cx 矩阵形式: min 儿=Cx di-bi-1.2 st/Ar s.t. k=1 b≤x≤ub x≥0,i=1,2,n
线性规划模型的一般形式 1 1 min , 1,2,., . s.t. 0, 1,2,., . n i i i n ik k i k i u c x a x b i n x i n 目标函数和所有的约束条件都是设计变量 的线性函数. min . s.t u cx Ax b vlb x vub 矩阵形式:
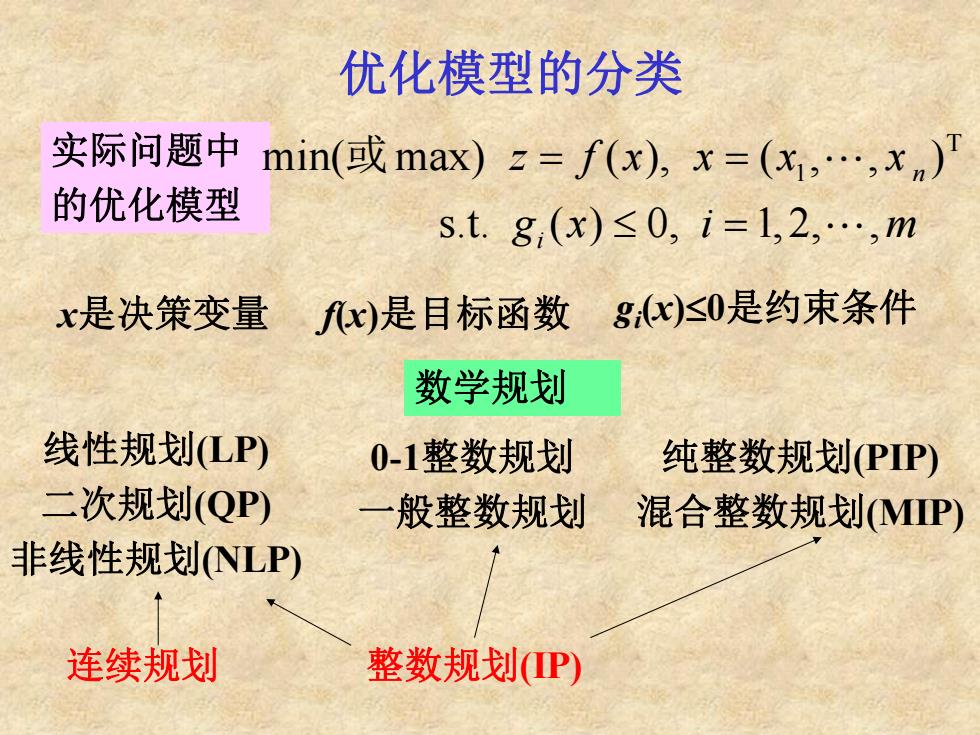
优化模型的分类 实际问题中 min(或max)z=f(x),x=(x,.,xn) 的优化模型 s.t.8,(x)≤0,i=1,2,.,m x是决策变量 fx)是目标函数gc)s0是约束条件 数学规划 线性规划LP) 0-1整数规划 纯整数规划(PIP) 二次规划(QP) 般整数规划 混合整数规划(MIP) 非线性规划NLP) 连续规划 整数规划(P)
实际问题中 的优化模型 T m 1 in( max) ( ), ( , , ) s.t. ( ) 0, 1, 2, , n i z f x x x x g x i m 或 x是决策变量 f(x)是目标函数 gi(x)0是约束条件 数学规划 线性规划(LP) 二次规划(QP) 非线性规划(NLP) 纯整数规划(PIP) 混合整数规划(MIP) 整数规划(IP) 0-1整数规划 一般整数规划 连续规划 优化模型的分类
用MATLAB优化工具箱解线性规划 1.模型: min z=cX s.t. AX≤b 命令:x=1 inprog(c,A,b) 2.模型:minz=cX st.AX≤b Aeq·X=beq 命令:x=1 inprog(c,A,b,Aeg,beg) 注意:若没有不等式:AX≤b存在,则令A=[],b=[]
用MATLAB优化工具箱解线性规划 min z=cX s.t. AX b 1. 模型: 命令:x=linprog(c, A, b) 2. 模型:min z=cX s.t. AX b Aeq X beq 命令:x=linprog(c,A,b,Aeq,beq) 注意:若没有不等式:AX b 存在,则令A=[ ],b=[ ]