第一章 线性系统的数学描述
第一章 线性系统的数学描述
1.1引言 1、建立系统的数学模型是控制系统进行分析和设 计的基础 系统的数学模型— 描述系统行为特性的数学 表达式(如传递函数)或数学方程(如微分方程、代 数方程) 2、同一个系统可以有不同的数学模型 ·系统研究的对象(输入、输出和状态变量)不同 。建立数学模型所用的数学方法不同 3、举例:直流电动机控制电路的数学模型
1.1 引 言 1、建立系统的数学模型是控制系统进行分析和设 计的基础 系统的数学模型——描述系统行为特性的数学 表达式(如传递函数)或数学方程(如微分方程、代 数方程) 2、同一个系统可以有不同的数学模型 系统研究的对象(输入、输出和状态变量)不同 建立数学模型所用的数学方法不同 3、举例:直流电动机控制电路的数学模型
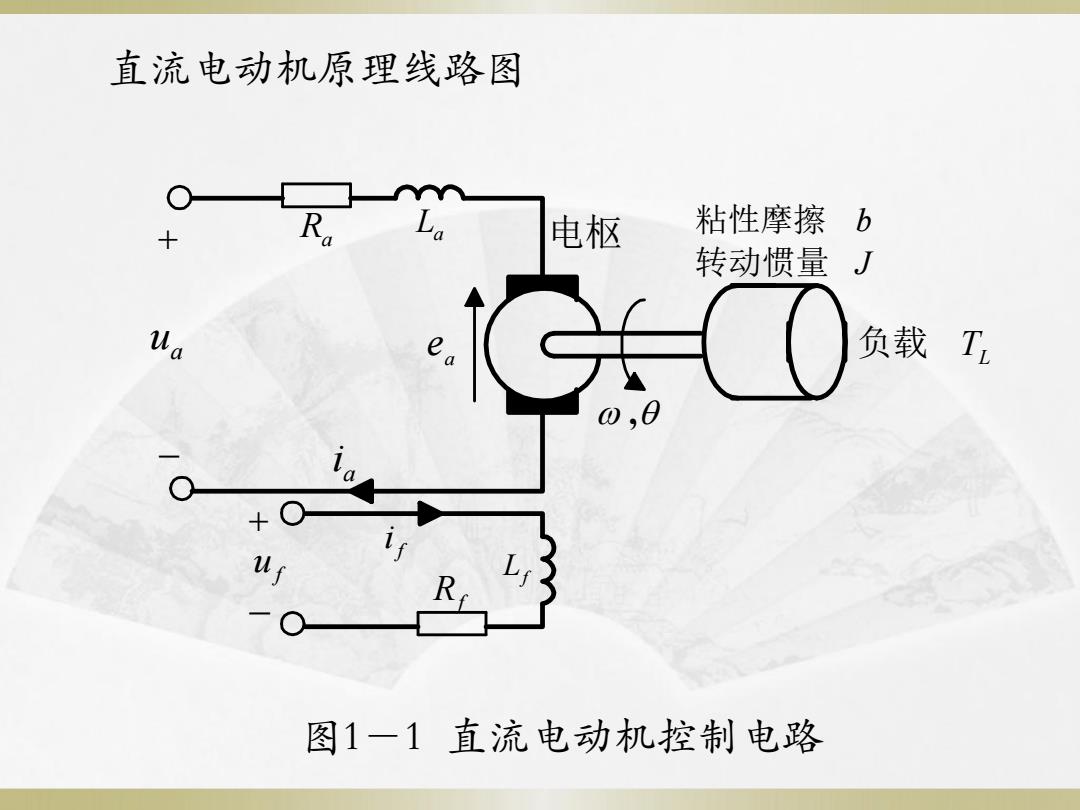
直流电动机原理线路图 粘性摩擦b + R 电枢 转动惯量J 负载 T uf 图1一1直流电动机控制电路
u f ua f i a i Ra Rf Lf La , 转动惯量 J 粘性摩擦 b 负载 TL 电枢 a e 直流电动机原理线路图 图1-1 直流电动机控制电路
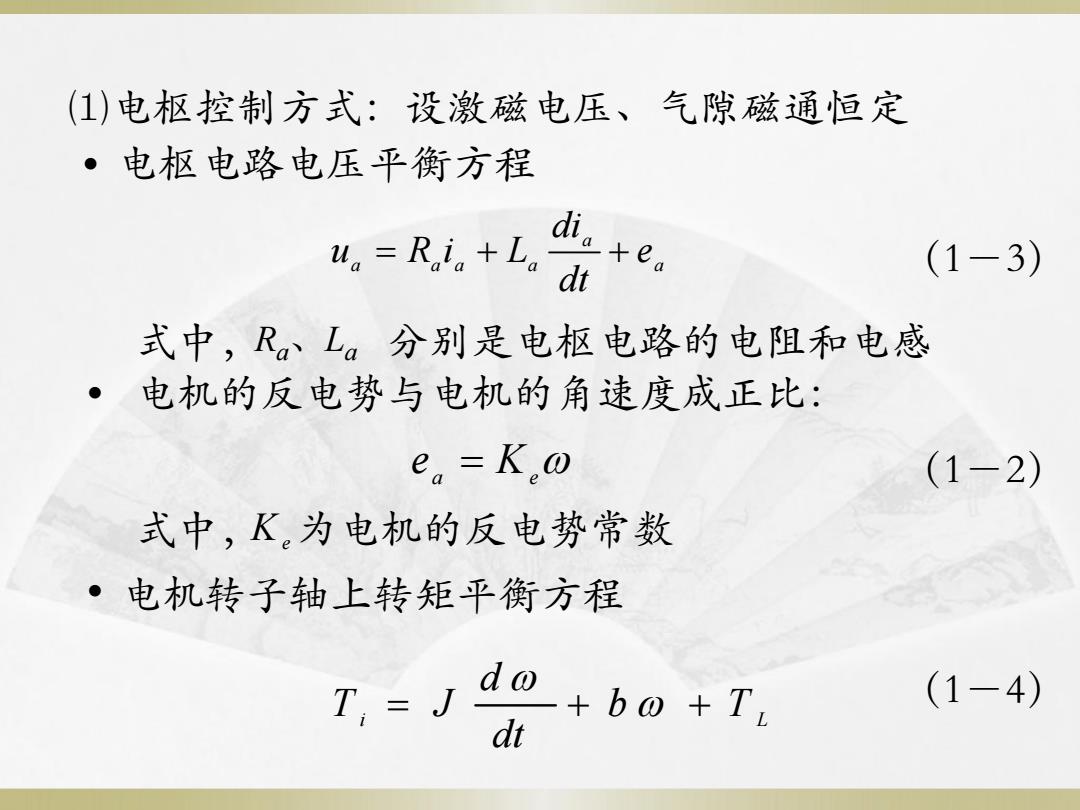
(1)电枢控制方式:设激磁电压、气隙磁通恒定 ·电枢电路电压平衡方程 u。=Rin+L di。+e。 dt (1-3) 式中,R。La分别是电枢电路的电阻和电感 电机的反电势与电机的角速度成正比: e。=K.o (1-2) 式中,K。为电机的反电势常数 ·电机转子轴上转矩平衡方程 T=J do+b+T (1-4) d
⑴电枢控制方式:设激磁电压、气隙磁通恒定 电枢电路电压平衡方程 式中, 分别是电枢电路的电阻和电感 电机的反电势与电机的角速度成正比: 式中, 为电机的反电势常数 电机转子轴上转矩平衡方程 (1-3) (1-4) (1-2) a a a a a a e dt di u R i L e a K e Ra、La i T L b dt d T J K e
式中 J为电机轴上总的等效转动惯量, b 为电机转轴上的等效粘性摩擦系数, T是负载转矩 T,是电动机电磁转矩 T:=Kiia (1-1) ●以电压u。为输入,角速度⊙为输出的运动方程 在以上各式中,消去中间变量。,并假定T,=0 得如下二阶微分方程 +(R.al*b)+(k.ki+Rbo-k
式中 为电机轴上总的等效转动惯量, 为电机转轴上的等效粘性摩擦系数, 是负载转矩 以电压 为输入,角速度 为输出的运动方程 在以上各式中,消去中间变量 ,并假定 得如下二阶微分方程 是电动机电磁转矩 (1-1) (1-5) J b TL Ti a u a TL 0 i a a a KeKt Rab Ktua dt d R J bL dt d L J ( ) ( ) 2 2 Ti Ki a i