上誉文廷大¥ SHANGHAI JIAO TONG UNIVERSITY 第二章状态空间描述 2.1基本概念 典型控制系统方框图 被控对象 状态x 控制4 输出业 执行器 被控过程 传感器 反馈控制 控制器 输入r (1)系统:一些相互制约的部分所构成的整体 典型的控制系统由被控对象、传感器、执行器和控制器组成 (2)输入和输出: 输入---由外部施加到系统上的全部激励 输出-一一 从外部量测到的来自系统的信息
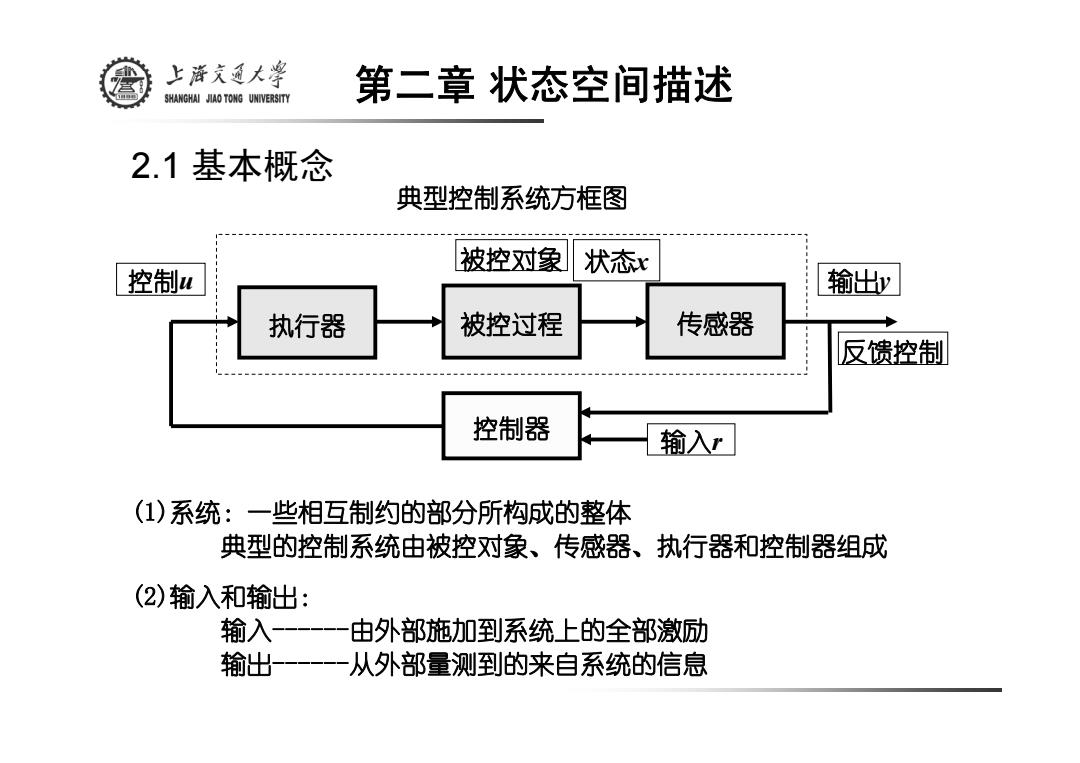
第二章 状态空间描述 2.1 基本概念 典型控制系统方框图 执行器 被控过程 传感器 控制器 输入 r 控制 u 输出y 被控对象 状态x 反馈控制 (1)系统:一些相互制约的部分所构成的整体 典型的控制系统由被控对象、传感器、执行器和控制器组成 (2)输入和输出: 输入------由外部施加到系统上的全部激励 输出------从外部量测到的来自系统的信息
上游文通大¥ SHANGHAI JIAO TONG UNIVERSITY 嘉兴民丰造纸厂 造纸生产过程控制流程图 浆阀 水 中浓纸浆42 一 蒸汽阀 V-43 混合箱 哈1蒸汽阀 V40 流浆箱 网 88 压榨 88 烘缸 表面施胶 网前部 网部、压榨部 第一干燥部 第二干燥部
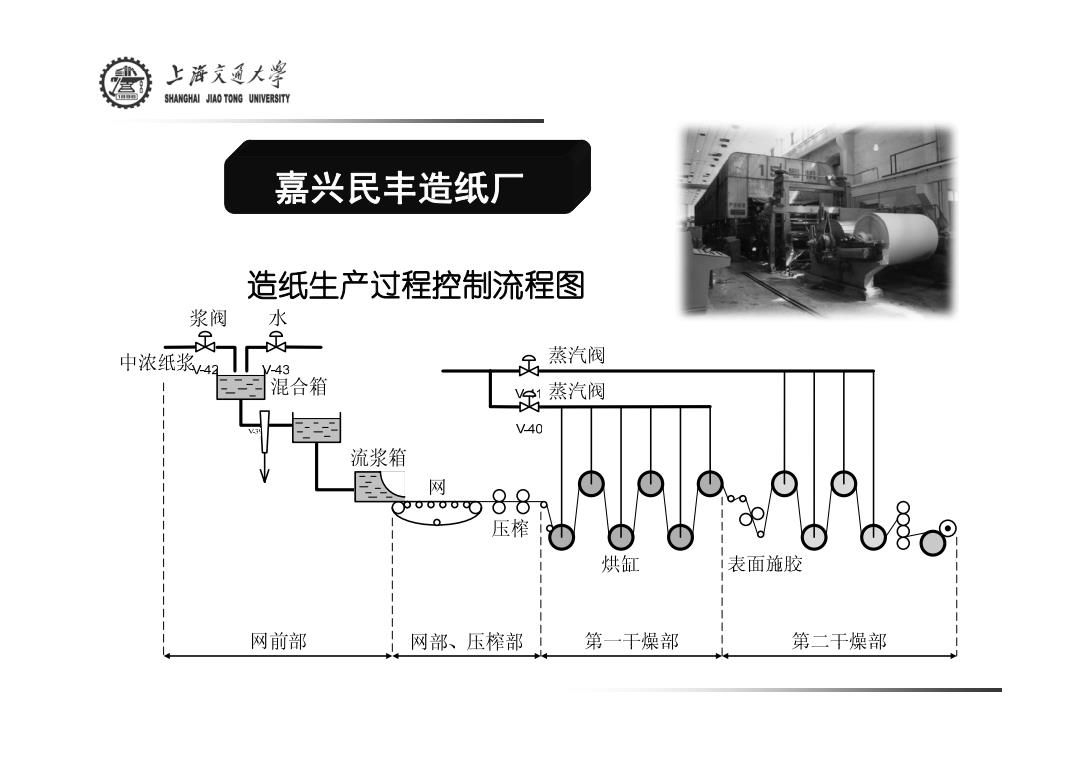
造纸生产过程控制流程图 嘉兴民丰造纸厂
上游文通大¥ SHANGHAI JIAO TONG UNIVERSITY (3)线性系统:对任何输入4,和42,系统H(u)满足叠加原理 叠加原理:H(+w2)=H(u)+H(2) (4)状态:表征系统在时间域中运动的信息和行为,如x(t,) (⑤)状态变量:能够完全表征系统运动状态的最小个数的一组变量 例如:由x(to)和u(t)确定系统在任意时刻t的状态 (6)状态向量:以系统的个状态变量作为分量的向量 x()=[x(t),…,xn(t)] (T)状态空间:以状态变量x(t),…,x,(t)为坐标轴构成的维空间
(4)状态:表征系统在时间域中运动的信息和行为,如 (6)状态向量:以系统的 n个状态变量作为分量的向量 [ ] T 1 () , , () () n xt x x = t t L (5)状态变量:能够完全表征系统运动状态的最小个数的一组变量 例如: 由 和 x t( ) 0 u(t)确定 了系统在任意时刻t的状态 (3)线性系统:对任何输入 和 ,系统 满足叠加原理 叠加原理: ( ) ( ) ( ) H u1 + u 2 = H u1 + H u 2 H(u) 1 u 2 u (7)状态空间:以状态变量 为坐标轴构成的 ,, x x 1() () t t L n n维空间 0 x t( )
上誉文廷大¥ SHANGHAI JIAO TONG UNIVERSITY (8)状态方程:描述系统状态与输入之间关系的、一阶微分方程: x=Ax+Bu (9)输出方程:描述系统输出与状态、输入之间关系的数学表达式: y=Cx+Du (10)状态空间模型:状态方程+输出方程 回旧回 =Ax+Bu y=Cx+Du 其中为状态矩阵,B为输入矩阵,C为输出矩阵,D为直接传递矩阵
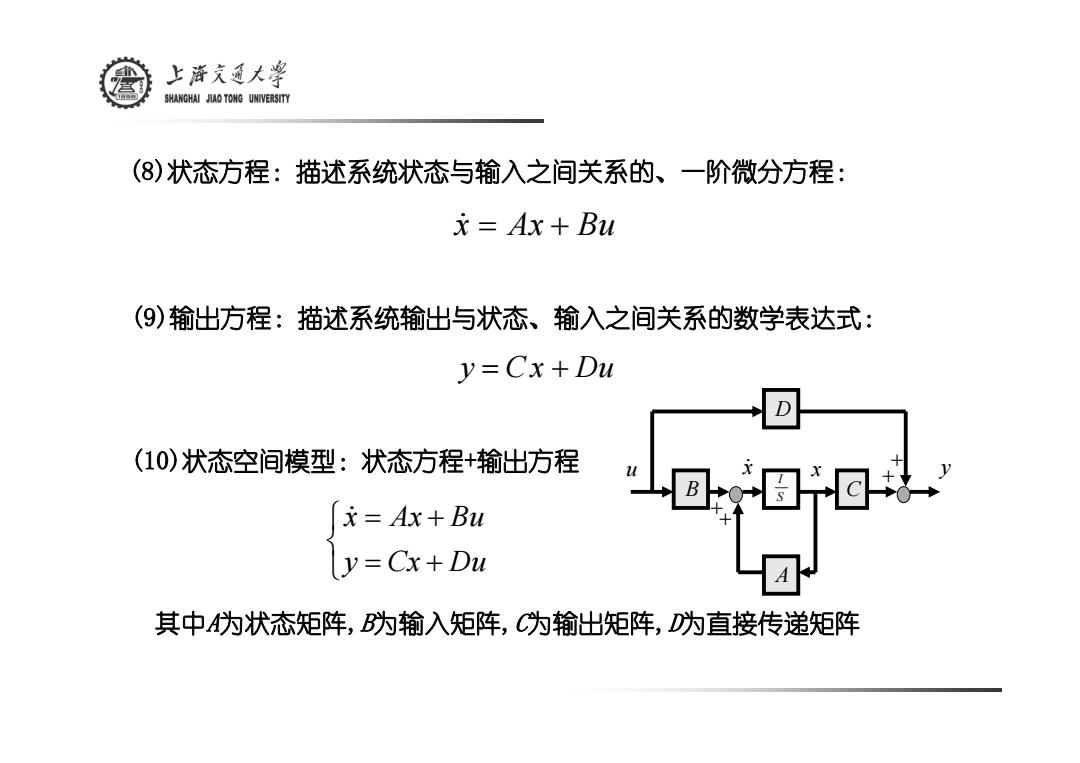
(10)状态空间模型:状态方程+输出方程 其中 A为状态矩阵, B为输入矩阵, C为输出矩阵, D为直接传递矩阵 ⎩ ⎨ ⎧ = + = + y Cx Du x& Ax Bu (8)状态方程:描述系统状态与输入之间关系的、一阶微分方程: x& = Ax + Bu (9)输出方程:描述系统输出与状态、输入之间关系的数学表达式: y = C x + Du B S I C D A u x& x y + + + +
上游文通大¥ SHANGHAI JIAO TONG UNIVERSITY 设单输入-单输出线性系统的状态变量为:x(t),x2(t)…,xn(t) 状态方程的一般形式为: 元1=a11x1+a12X2+…+a1mXn+bu X2 =a2+a22x2+..+a2nxn+bzu 年●n0 xn amx+an2x2 +.amxn +bnu 输出方程的一般形式为: y=CX+Cx+Cx
设单输入-单输出线性系统的状态变量为: 状态方程的一般形式为: ( ), ( ) , ( ) 1 2 x t x t x t L n x a x a x a x b u x a x a x a x b u x a x a x a x b u n n n nn n n n n n n = + + + + = + + + + = + + + + & L L L & L & L 1 1 2 2 2 21 1 22 2 2 2 1 11 1 12 2 1 1 输出方程的一般形式为: n n y = c x + c x + L + c x 1 1 2 2