第六章 状态反馈和状态观测器
第六章 状态反馈和状态观测器
6.1引言 (1)研究自动控制系统有三大命题:模型、分析和综合。 前面几章讨论的是线性系统数学模型的建立,以及系统的分 析问题。 系统的分析是已知系统的结构参数,在外界输入或扰动作 用下,定量或定性分析系统的性能(系统的响应、 稳定性、 和能控行、能观性)问题 系统的综合也称系统的设计问题,与系统分析相反,它是 在给定系统基本结构、参数的前提下,设计一种控制器,它 产生的控制作用能使系统达到期望的性能。 系统的控制有两种:开环控制和闭环控制(反馈控制)。 反馈控制对于系统抗干扰和抗参数变动等方面均有较强的作 用,被广泛应用。反馈有两种形式:状态反馈与输出反馈
6.1 引 言 ⑴ 研究自动控制系统有三大命题:模型、分析和综合。 系统的综合也称系统的设计问题,与系统分析相反,它是 在给定系统基本结构、参数的前提下,设计一种控制器,它 产生的控制作用能使系统达到期望的性能。 前面几章讨论的是线性系统数学模型的建立,以及系统的分 析问题。 系统的分析是已知系统的结构参数,在外界输入或扰动作 用下,定量或定性分析系统的性能(系统的响应、稳定性、 和能控行、能观性)问题 系统的控制有两种:开环控制和闭环控制(反馈控制)。 反馈控制对于系统抗干扰和抗参数变动等方面均有较强的作 用,被广泛应用。 反馈有两种形式:状态反馈与输出反馈

2)状态反馈 在状态空间描述中,系统的状态包含了系统的所有重要 信息,如果系统的反馈信号取之于系统状态或系统输出, 无疑将会获得性能更好的控制。这就是状态反馈。 图6-1是系统控制作用 系统 M是由状态反馈和参考输 A,B,C,D -Kx 入组成的状态反馈系统结 构方块图。 本章将会论及,如果系 控制器 统是能控的,就可以通过 K 选择适当的K来任意配置 系统的极,点。 图6-1
在状态空间描述中 ,系统的状态包含了系统的所有重要 信息,如果系统的反馈信号取之于系统状态或系统输出, 无疑将会获得性能更好的控制。这就是状态反馈。 ( ) 系 统 A,B,C, D K 控制器 x r + −Kx u y 图6-1 图6-1是系统控制作用 是由状态反馈和参考输 入组成的状态反馈系统结 构方块图。 本章将会论及,如果系 统是能控的,就可以通过 选择适当的 来任意配置 系统的极点 。 K u ⑵ 状态反馈
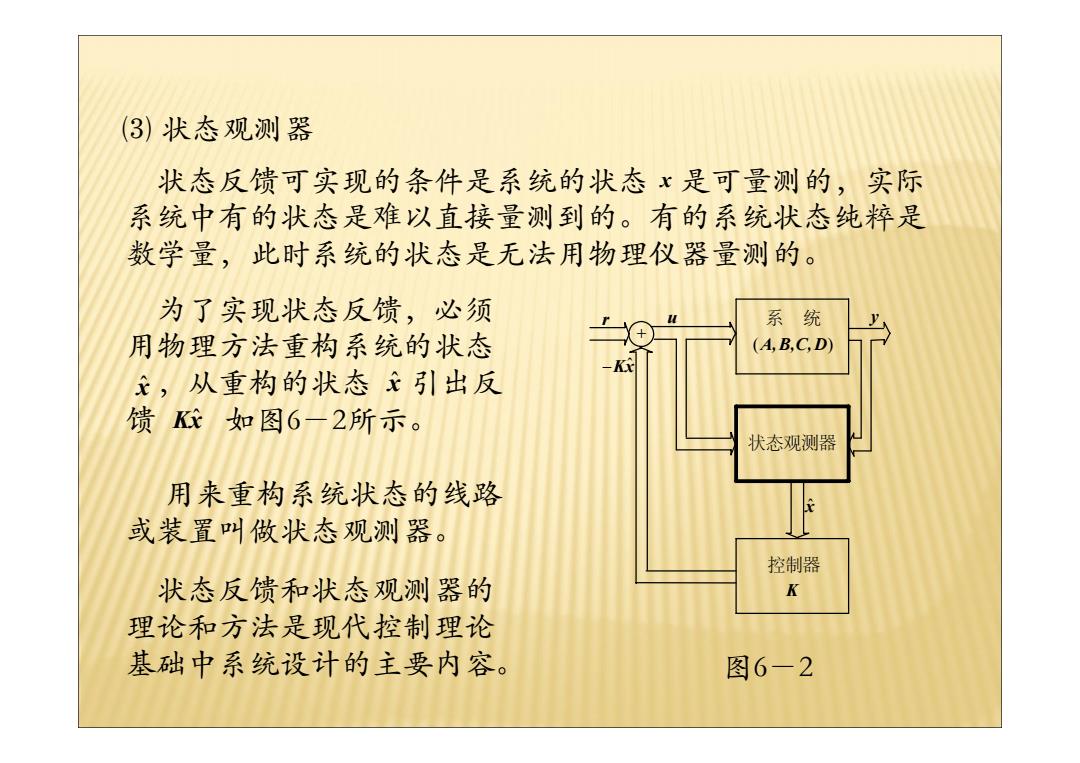
3)状态观测器 状态反馈可实现的条件是系统的状态x是可量测的,实际 系统中有的状态是难以直接量测到的。有的系统状态纯粹是 数学量,此时系统的状态是无法用物理仪器量测的。 为了实现状态反馈,必须 系统 用物理方法重构系统的状态 (A,B,C,D) ,从重构的状态引出反 馈配如图6-2所示。 状态观测器 用来重构系统状态的线路 或装置叫做状态观测器。 控制器 状态反馈和状态观测器的 K 理论和方法是现代控制理论 基础中系统设计的主要内容。 图6-2
⑶ 状态观测器 状态反馈可实现的条件是系统的状态 是可量测的,实际 系统中有的状态是难以直接量测到的。有的系统状态纯粹是 数学量,此时系统的状态是无法用物理仪器量测的。 x 状态观测器 K 控制器 x ˆ r + −Kxˆ u (A,B,C,D) 系 统 y 图6-2 为了实现状态反馈,必须 用物理方法重构系统的状态 ,从重构的状态 引出反 馈 如图6-2所示。 x ˆ x ˆ Kxˆ 用来重构系统状态的线路 或装置叫做状态观测器。 状态反馈和状态观测器的 理论和方法是现代控制理论 基础中系统设计的主要内容
(4)本章主要内容 ①状态反馈:线性定常系统状态反馈对系统的影响,状态反 馈可任意配置系统极,点的条件和计算方法。 ② 状态观测器:状态观测器能重构状态的条件和设计方法。 用求解西尔维斯特(Sylvester)方程的方法设计 状态反馈和状态观测器。 ③状态反馈的应用:系统的镇定、系统解耦和无静差跟踪系 统的综合问题 ④线性二次型最优控制的理论及设计控制器的方法
① 状态反馈:线性定常系统状态反馈对系统的影响, 状态反 馈可任意配置系统极点的条件和计算方法 。 ⑷ 本章主要内容 ② 状态观测器:状态观测器能重构状态的条件和设计方法。 用求解西尔维斯特( )方程的方法设计 状态反馈和状态观测器 。 ③ 状态反馈的应用:系统的镇定 、系统解耦和无静差跟踪系 统的综合问题 ④ 线性二次型最优控制的理论及设计控制器的方法 Sylvester